Mécanique & Lois de Newton
Shared 3/25/2026•66 views
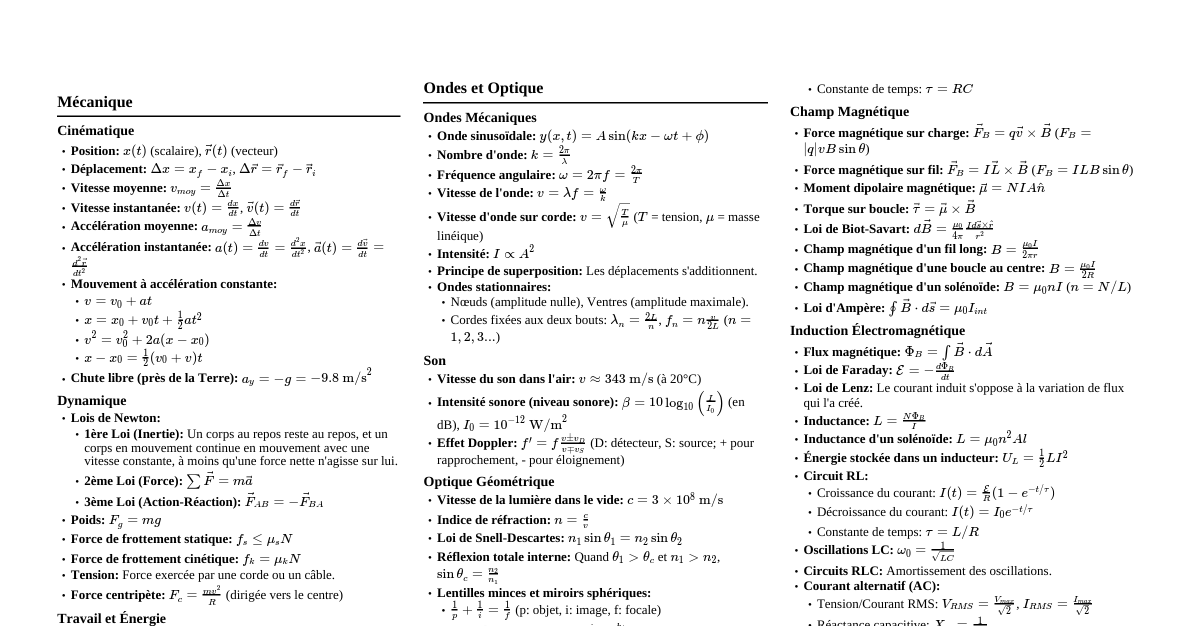
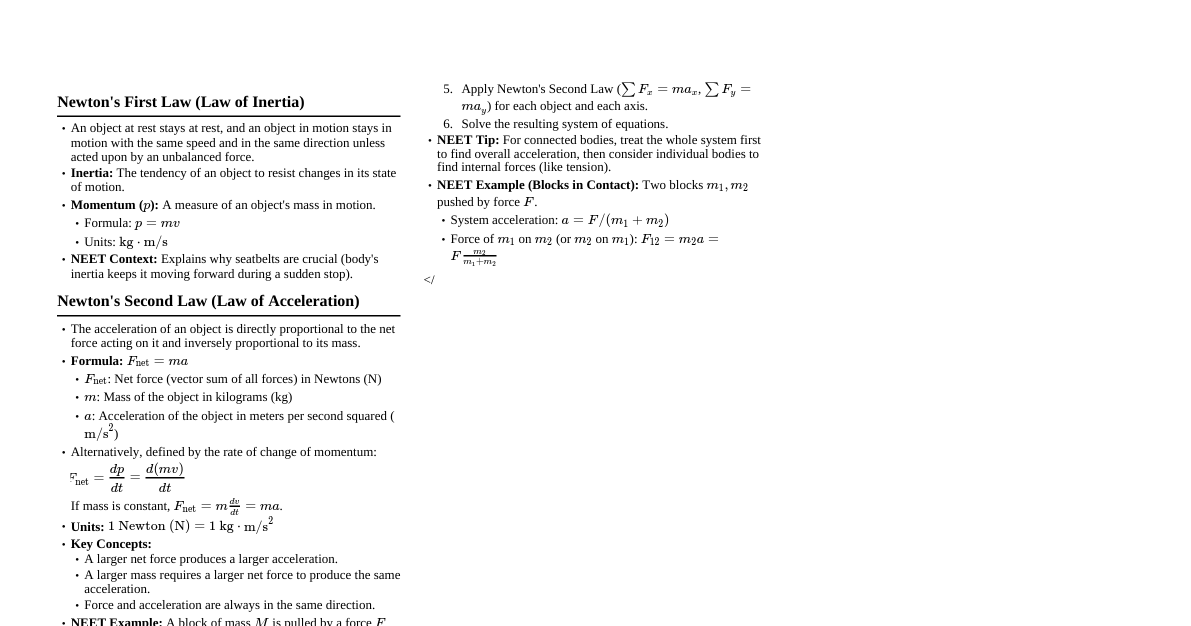
### 🎯 Cinématique du Point #### ➡️ Mouvement & Dérivées | Grandeur | Symbole | Définition | Unité | |---|---|---|---| | **Position** | $\vec{r}(t)$ | Vecteur localisant le point | m | | **Vitesse** | $\vec{v}(t)$ | $\frac{d\vec{r}}{dt}$ | m/s | | **Accélération** | $\vec{a}(t)$ | $\frac{d\vec{v}}{dt} = \frac{d^2\vec{r}}{dt^2}$ | m/s² | #### 🌐 Repères Clés - **Cartésien (XYZ):** Le plus simple pour les mouvements rectilignes. - $\vec{r} = x\vec{e}_x + y\vec{e}_y + z\vec{e}_z$ - $\vec{v} = \dot{x}\vec{e}_x + \dot{y}\vec{e}_y + \dot{z}\vec{e}_z$ - $\vec{a} = \ddot{x}\vec{e}_x + \ddot{y}\vec{e}_y + \ddot{z}\vec{e}_z$ - **Cylindrique ($r, \theta, z$):** Idéal pour les mouvements avec symétrie axiale ou circulaire. - $\vec{v} = \dot{r}\vec{e}_r + r\dot{\theta}\vec{e}_{\theta} + \dot{z}\vec{e}_z$ - $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\vec{e}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\vec{e}_{\theta} + \ddot{z}\vec{e}_z$ - **Frenet (intrinsèque):** Pour analyser la trajectoire (tangente/normale). - $\vec{v} = v\vec{T}$ (vitesse tangentielle) - $\vec{a} = \frac{dv}{dt}\vec{T} + \frac{v^2}{R}\vec{N}$ (accélération tangentielle + normale) - $\vec{T}$: vecteur tangent, $\vec{N}$: vecteur normal, $R$: rayon de courbure. ### ⚖️ Lois de Newton : Le Fondement #### 1. Loi d'Inertie (1ère Loi) - **Concept:** Un corps au repos reste au repos, un corps en mouvement rectiligne uniforme reste en mouvement rectiligne uniforme, **sauf si une force nette agit sur lui.** - **Condition:** $\sum \vec{F}_{ext} = \vec{0} \implies \vec{v} = \text{constante}$ (dans un repère galiléen). #### 2. Principe Fondamental de la Dynamique (2ème Loi) - **Concept:** La force nette agissant sur un objet est égale au taux de changement de sa quantité de mouvement. - **Formule:** $\sum \vec{F}_{ext} = m\vec{a}$ - **Quantité de mouvement:** $\vec{p} = m\vec{v}$ - **Forme générale:** $\sum \vec{F}_{ext} = \frac{d\vec{p}}{dt}$ (utile si la masse change). #### 3. Principe des Actions Réciproques (3ème Loi) - **Concept:** Pour chaque action, il y a une réaction égale et opposée. - **Formule:** $\vec{F}_{A/B} = -\vec{F}_{B/A}$ - **Important:** Les forces agissent sur des corps différents ! ### 💪 Forces Courantes à Maîtriser | Force | Symbole | Direction | Formule(s) | Notes | |---|---|---|---|---| | **Poids** | $\vec{P}$ | Verticale vers le bas | $\vec{P} = m\vec{g}$ | $g \approx 9.81$ m/s² | | **Tension** | $\vec{T}$ | Le long du fil/corde, tire | - | Toujours une force de traction | | **Réaction Normale** | $\vec{N}$ | Perpendiculaire à la surface | - | S'oppose à l'enfoncement | | **Frottements Solides** | $\vec{f}$ | Opposée au mouvement | $\mu_s N$ (statique max), $\mu_c N$ (cinétique) | $\mu_s > \mu_c$ (statique > cinétique) | | **Frottements Fluides** | $\vec{f}$ | Opposée à $\vec{v}$ | $-k\vec{v}$ (faible $v$), $-k'v^2\frac{\vec{v}}{v}$ (fort $v$) | Dépend de la vitesse du fluide | | **Rappel (Ressort)** | $\vec{F}_r$ | Vers la position d'équilibre | $\vec{F}_r = -k(l - l_0)\vec{u}$ | Loi de Hooke: $k$ est la raideur | *Exemple de forces sur un plan incliné.* ### ⚡ Théorèmes Énergétiques #### 1. Énergie Cinétique ($E_c$) - **Définition:** Énergie due au mouvement. - **Formule:** $E_c = \frac{1}{2}mv^2$ - **Théorème de l'Énergie Cinétique (TEC):** - $\Delta E_c = W_{tot} = \sum W(\vec{F}_{ext})$ (pour un point matériel) - Le travail $W$ d'une force $\vec{F}$ sur un déplacement $d\vec{r}$ est $dW = \vec{F} \cdot d\vec{r}$. #### 2. Énergie Potentielle ($E_p$) - **Définition:** Énergie stockée due à la position. - **Lien avec la force:** $\vec{F} = -\vec{\nabla}E_p$ (pour une force conservative). - **Exemples:** - **Pesanteur:** $E_p = mgh$ (pour un champ de pesanteur uniforme) - **Ressort:** $E_p = \frac{1}{2}k(l - l_0)^2$ #### 3. Énergie Mécanique ($E_m$) - **Définition:** Somme de l'énergie cinétique et potentielle. - $E_m = E_c + E_p$ - **Conservation:** $E_m = \text{constante}$ **SI** seules des forces conservatives travaillent (pas de frottements !). - Si des forces non conservatives travaillent: $\Delta E_m = W_{forces\_non\_conservatives}$ #### 4. Théorème du Moment Cinétique - **Moment Cinétique:** $\vec{L}_O = \vec{r} \wedge \vec{p} = \vec{r} \wedge (m\vec{v})$ - Mesure la "quantité de rotation" autour d'un point O. - **Théorème:** $\frac{d\vec{L}_O}{dt} = \sum \vec{M}_O(\vec{F}_{ext})$ - $\vec{M}_O(\vec{F}) = \vec{r} \wedge \vec{F}$ (Moment d'une force par rapport à O). - **Conservation:** Si $\sum \vec{M}_O(\vec{F}_{ext}) = \vec{0}$, alors $\vec{L}_O = \text{constante}$. - Très utile pour les mouvements planétaires ou les systèmes à symétrie de rotation.