Rotational Motion
Cheatsheet Content
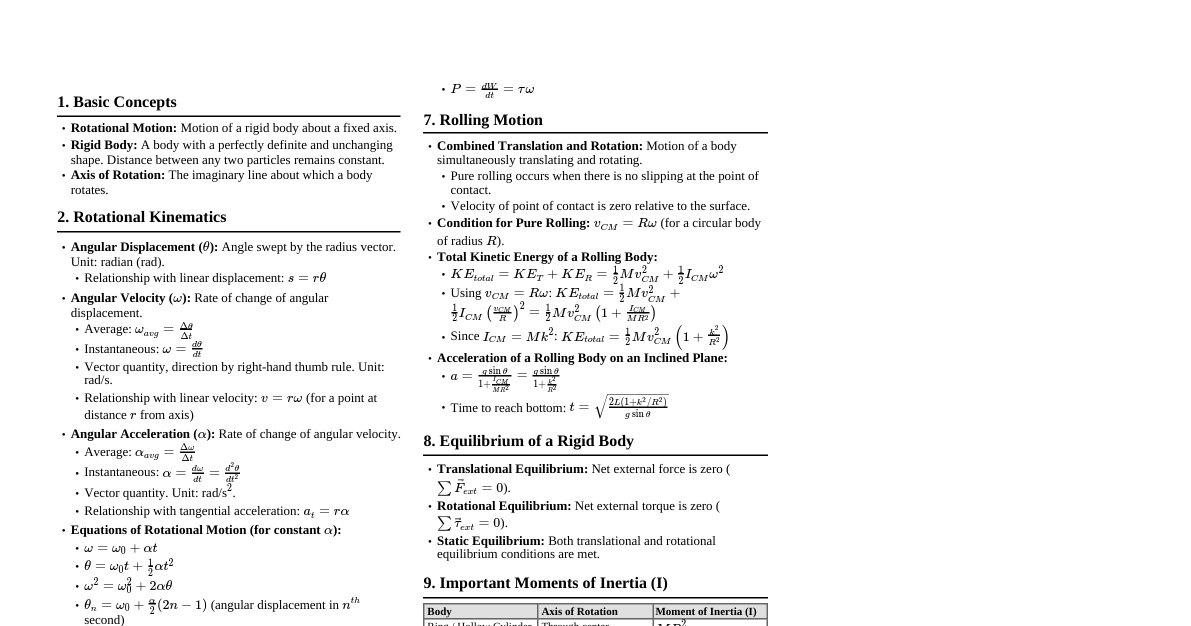
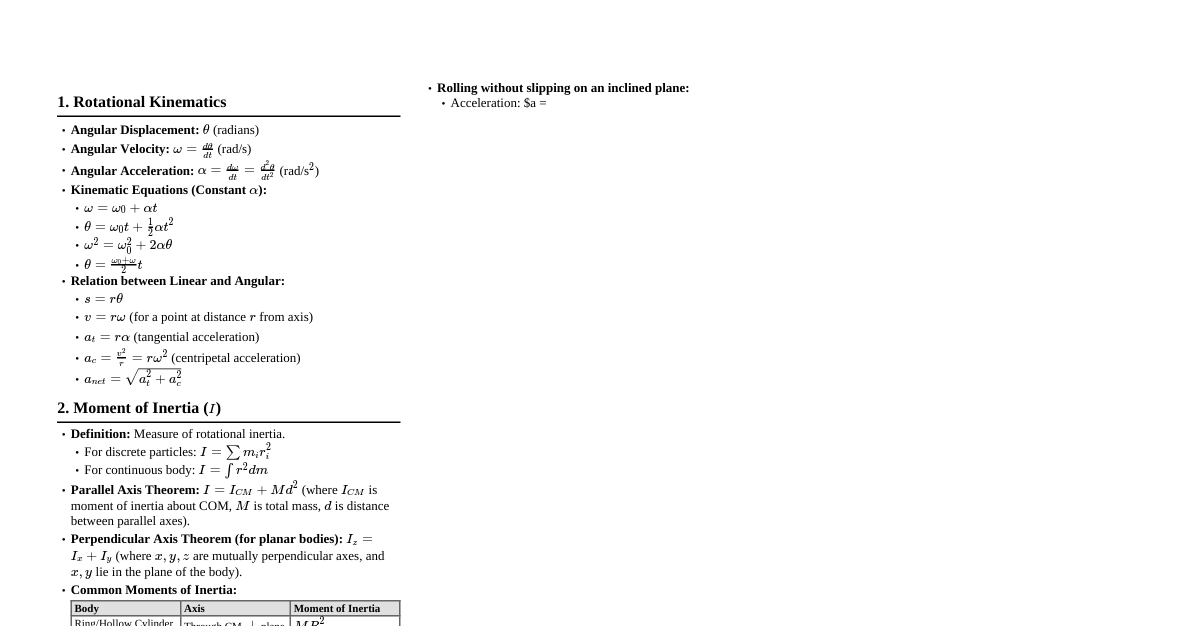
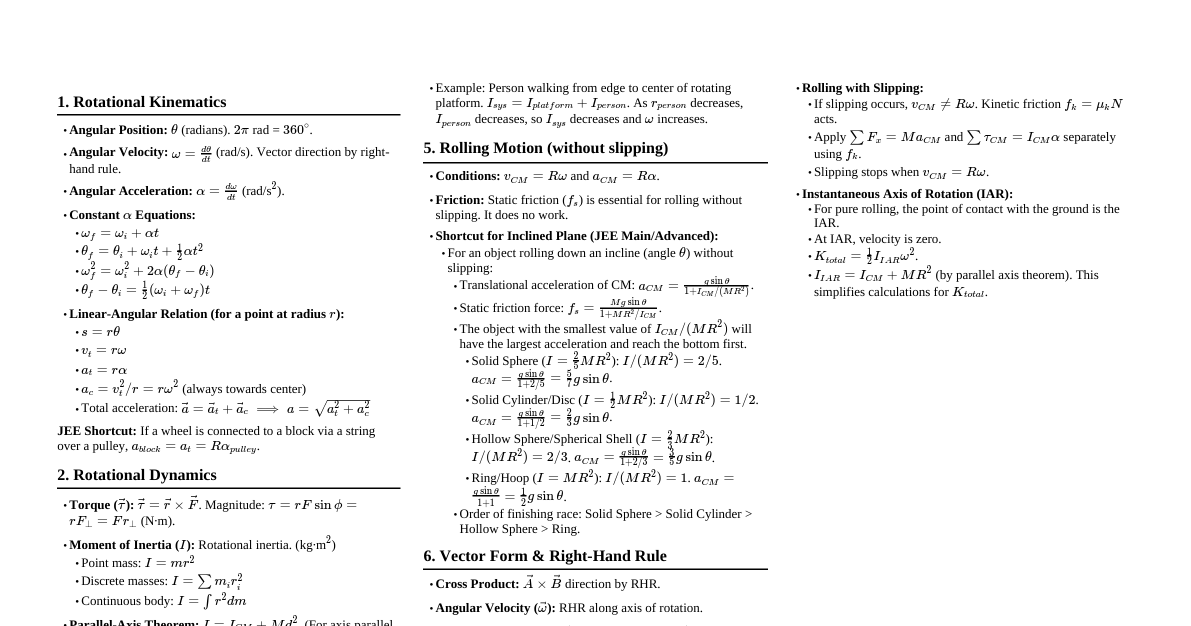
### Rotational Kinematic Equations - **Angular Displacement:** $\theta$ (radians) - **Angular Velocity:** $\omega = \frac{d\theta}{dt}$ (rad/s) - **Angular Acceleration:** $\alpha = \frac{d\omega}{dt}$ (rad/s$^2$) - **Constant Angular Acceleration:** - $\omega = \omega_0 + \alpha t$ - $\theta = \theta_0 + \omega_0 t + \frac{1}{2}\alpha t^2$ - $\omega^2 = \omega_0^2 + 2\alpha(\theta - \theta_0)$ - $\theta - \theta_0 = \frac{1}{2}(\omega_0 + \omega)t$ ### Relations Between Linear and Angular Variables - **Arc Length:** $s = r\theta$ - **Tangential Speed:** $v_t = r\omega$ - **Tangential Acceleration:** $a_t = r\alpha$ - **Centripetal Acceleration:** $a_c = \frac{v_t^2}{r} = r\omega^2$ - **Total Acceleration:** $\vec{a} = \vec{a_t} + \vec{a_c}$ (vector sum) ### Moment of Inertia ($I$) - **Definition:** $I = \sum m_i r_i^2$ (for discrete particles) - **Continuous Body:** $I = \int r^2 dm$ - **Parallel Axis Theorem:** $I = I_{CM} + Md^2$ - **Common Shapes:** - **Hoop/Thin Cylinder (around central axis):** $I = MR^2$ - **Solid Cylinder/Disk (around central axis):** $I = \frac{1}{2}MR^2$ - **Solid Sphere (around diameter):** $I = \frac{2}{5}MR^2$ - **Thin Rod (around center):** $I = \frac{1}{12}ML^2$ - **Thin Rod (around end):** $I = \frac{1}{3}ML^2$ ### Torque ($\tau$) - **Definition:** $\vec{\tau} = \vec{r} \times \vec{F}$ - **Magnitude:** $\tau = rF\sin\phi = rF_\perp = r_\perp F$ - **Net Torque:** $\sum \tau = I\alpha$ (Newton's Second Law for Rotation) ### Rotational Kinetic Energy - **Definition:** $K_{rot} = \frac{1}{2}I\omega^2$ - **Total Kinetic Energy (rolling):** $K_{total} = K_{trans} + K_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ ### Angular Momentum ($\vec{L}$) - **For a particle:** $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times m\vec{v}$ - **For a rigid body:** $\vec{L} = I\vec{\omega}$ - **Conservation of Angular Momentum:** If net external torque is zero, $\vec{L}_{initial} = \vec{L}_{final}$ - $I_1\omega_1 = I_2\omega_2$ - **Torque and Angular Momentum:** $\vec{\tau}_{net} = \frac{d\vec{L}}{dt}$ ### Work and Power in Rotational Motion - **Work done by Torque:** $W = \int \tau d\theta$ - **Constant Torque:** $W = \tau(\theta_f - \theta_i)$ - **Power:** $P = \frac{dW}{dt} = \tau\omega$ - **Work-Energy Theorem:** $W_{net} = \Delta K_{rot} = \frac{1}{2}I\omega_f^2 - \frac{1}{2}I\omega_i^2$ ### Notes and Tips - **Units:** Always use radians for angular displacement, velocity, and acceleration in formulas. - **Direction:** Use the right-hand rule for vector quantities like torque and angular momentum. - **Rolling Without Slipping:** $v_{CM} = R\omega$ and $a_{CM} = R\alpha$. This is a crucial condition for many problems. - **Reference Point:** When calculating torque or angular momentum, be consistent with your choice of origin. - **Conservation Laws:** Look for opportunities to apply conservation of energy (if no non-conservative forces do work) or conservation of angular momentum (if no net external torque).