Rotational Motion (Class 11)
Cheatsheet Content
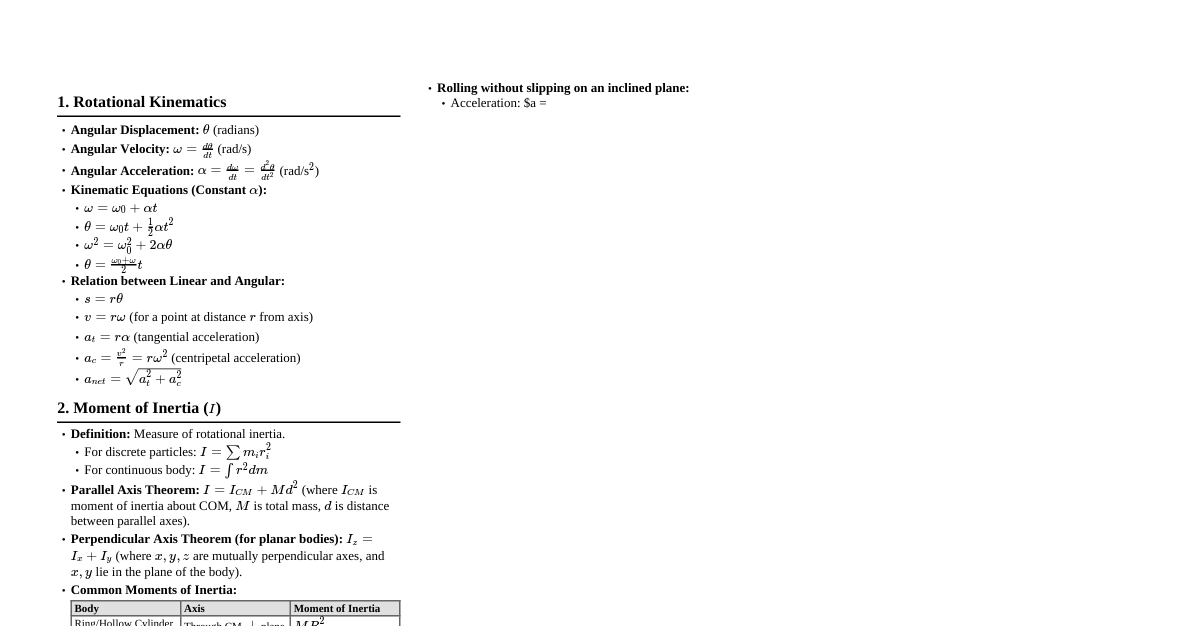
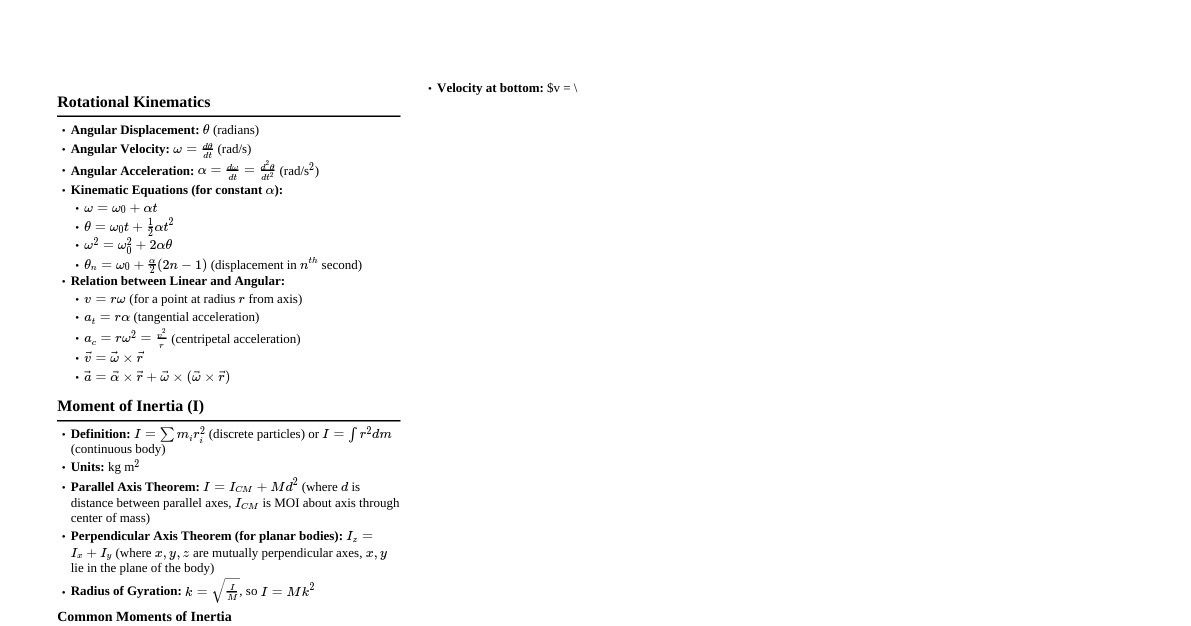
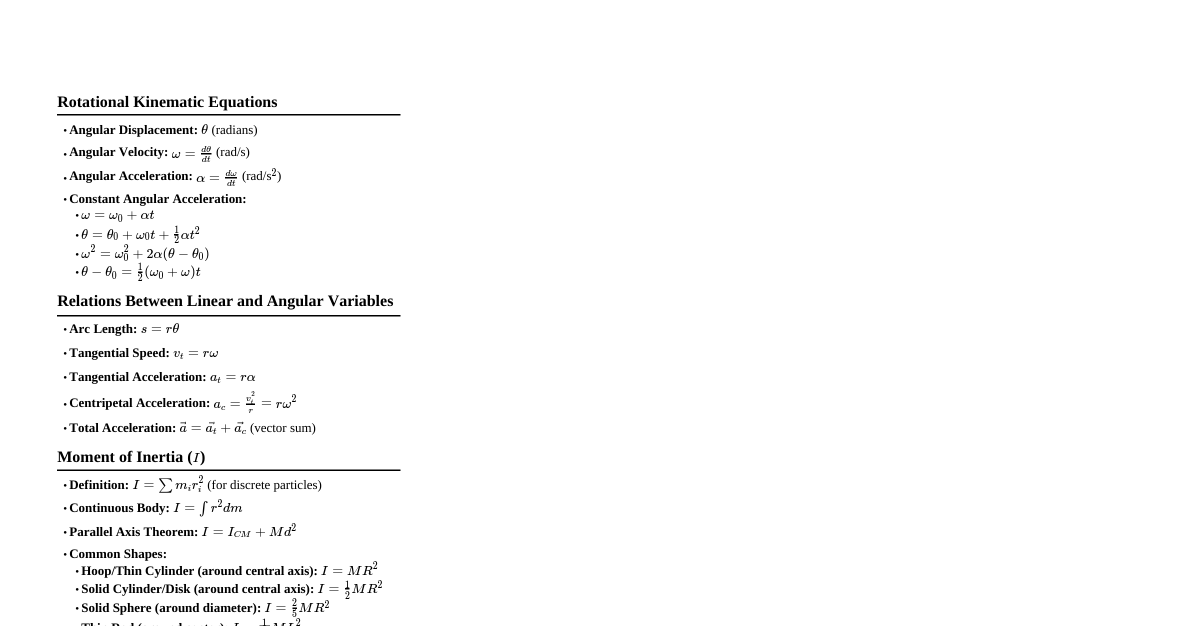
1. Basic Concepts Rotational Motion: Motion of a rigid body about a fixed axis. Rigid Body: A body with a perfectly definite and unchanging shape. Distance between any two particles remains constant. Axis of Rotation: The imaginary line about which a body rotates. 2. Rotational Kinematics Angular Displacement ($\theta$): Angle swept by the radius vector. Unit: radian (rad). Relationship with linear displacement: $s = r\theta$ Angular Velocity ($\omega$): Rate of change of angular displacement. Average: $\omega_{avg} = \frac{\Delta\theta}{\Delta t}$ Instantaneous: $\omega = \frac{d\theta}{dt}$ Vector quantity, direction by right-hand thumb rule. Unit: rad/s. Relationship with linear velocity: $v = r\omega$ (for a point at distance $r$ from axis) Angular Acceleration ($\alpha$): Rate of change of angular velocity. Average: $\alpha_{avg} = \frac{\Delta\omega}{\Delta t}$ Instantaneous: $\alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2}$ Vector quantity. Unit: rad/s$^2$. Relationship with tangential acceleration: $a_t = r\alpha$ Equations of Rotational Motion (for constant $\alpha$): $\omega = \omega_0 + \alpha t$ $\theta = \omega_0 t + \frac{1}{2}\alpha t^2$ $\omega^2 = \omega_0^2 + 2\alpha\theta$ $\theta_n = \omega_0 + \frac{\alpha}{2}(2n-1)$ (angular displacement in $n^{th}$ second) Centripetal Acceleration ($a_c$): Always directed towards the center. $a_c = \frac{v^2}{r} = r\omega^2 = v\omega$ 3. Moment of Inertia (I) Definition: Rotational analogue of mass. Measures resistance to change in rotational motion. For a point mass $m$ at distance $r$ from axis: $I = mr^2$ For a system of particles: $I = \sum m_i r_i^2$ For a rigid body: $I = \int r^2 dm$ Units: kg m$^2$. Radius of Gyration ($k$): $I = Mk^2$, where $M$ is total mass. $k = \sqrt{\frac{I}{M}}$. Theorems of Moment of Inertia: Perpendicular Axes Theorem (for planar bodies): $I_z = I_x + I_y$ (where $x, y$ axes are in the plane and $z$ axis is perpendicular to the plane, all passing through a common point). Parallel Axes Theorem: $I = I_{CM} + Md^2$ (where $I_{CM}$ is MOI about an axis passing through CM, $M$ is total mass, $d$ is distance between the two parallel axes). 4. Torque ($\tau$) Definition: Rotational analogue of force. Causes angular acceleration. $\tau = rF \sin\theta = |\vec{r} \times \vec{F}|$ $\tau = r F_{\perp}$ (where $F_{\perp}$ is perpendicular component of force) $\tau = F r_{\perp}$ (where $r_{\perp}$ is perpendicular distance from axis to line of action of force, called lever arm or moment arm) Units: N m. Relation with Angular Acceleration: $\tau = I\alpha$ (Newton's second law for rotation). Couple: Two equal and opposite forces acting on a body, separated by a distance, forming a torque. $\tau = Fd$. 5. Angular Momentum (L) Definition: Rotational analogue of linear momentum. For a particle: $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times (m\vec{v})$ Magnitude: $L = mvr\sin\theta = I\omega$ Units: kg m$^2$/s or J s. Relation with Torque: $\tau = \frac{d\vec{L}}{dt}$ (Newton's second law for rotation in terms of angular momentum). Conservation of Angular Momentum: If net external torque on a system is zero ($\tau_{ext} = 0$), then total angular momentum is conserved ($\vec{L}_{total} = \text{constant}$). $I_1\omega_1 = I_2\omega_2$ Applications: Spinning ice skater, diver, planetary motion. 6. Rotational Work and Energy Rotational Work Done ($W$): $W = \int \tau d\theta$ For constant torque: $W = \tau\theta$ Rotational Kinetic Energy ($KE_R$): $KE_R = \frac{1}{2}I\omega^2$ Work-Energy Theorem for Rotation: $W = \Delta KE_R = \frac{1}{2}I\omega_f^2 - \frac{1}{2}I\omega_i^2$. Power in Rotational Motion ($P$): $P = \frac{dW}{dt} = \tau\omega$ 7. Rolling Motion Combined Translation and Rotation: Motion of a body simultaneously translating and rotating. Pure rolling occurs when there is no slipping at the point of contact. Velocity of point of contact is zero relative to the surface. Condition for Pure Rolling: $v_{CM} = R\omega$ (for a circular body of radius $R$). Total Kinetic Energy of a Rolling Body: $KE_{total} = KE_T + KE_R = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ Using $v_{CM} = R\omega$: $KE_{total} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\left(\frac{v_{CM}}{R}\right)^2 = \frac{1}{2}Mv_{CM}^2 \left(1 + \frac{I_{CM}}{MR^2}\right)$ Since $I_{CM} = Mk^2$: $KE_{total} = \frac{1}{2}Mv_{CM}^2 \left(1 + \frac{k^2}{R^2}\right)$ Acceleration of a Rolling Body on an Inclined Plane: $a = \frac{g\sin\theta}{1 + \frac{I_{CM}}{MR^2}} = \frac{g\sin\theta}{1 + \frac{k^2}{R^2}}$ Time to reach bottom: $t = \sqrt{\frac{2L(1 + k^2/R^2)}{g\sin\theta}}$ 8. Equilibrium of a Rigid Body Translational Equilibrium: Net external force is zero ($\sum \vec{F}_{ext} = 0$). Rotational Equilibrium: Net external torque is zero ($\sum \vec{\tau}_{ext} = 0$). Static Equilibrium: Both translational and rotational equilibrium conditions are met. 9. Important Moments of Inertia (I) Body Axis of Rotation Moment of Inertia (I) Ring / Hollow Cylinder (mass M, radius R) Through center, perpendicular to plane $MR^2$ Disc / Solid Cylinder (mass M, radius R) Through center, perpendicular to plane $\frac{1}{2}MR^2$ Solid Sphere (mass M, radius R) About its diameter $\frac{2}{5}MR^2$ Hollow Sphere (mass M, radius R) About its diameter $\frac{2}{3}MR^2$ Thin Rod (mass M, length L) Through CM, perpendicular to length $\frac{1}{12}ML^2$ Thin Rod (mass M, length L) Through one end, perpendicular to length $\frac{1}{3}ML^2$