Rotational Dynamics (JEE)
Cheatsheet Content
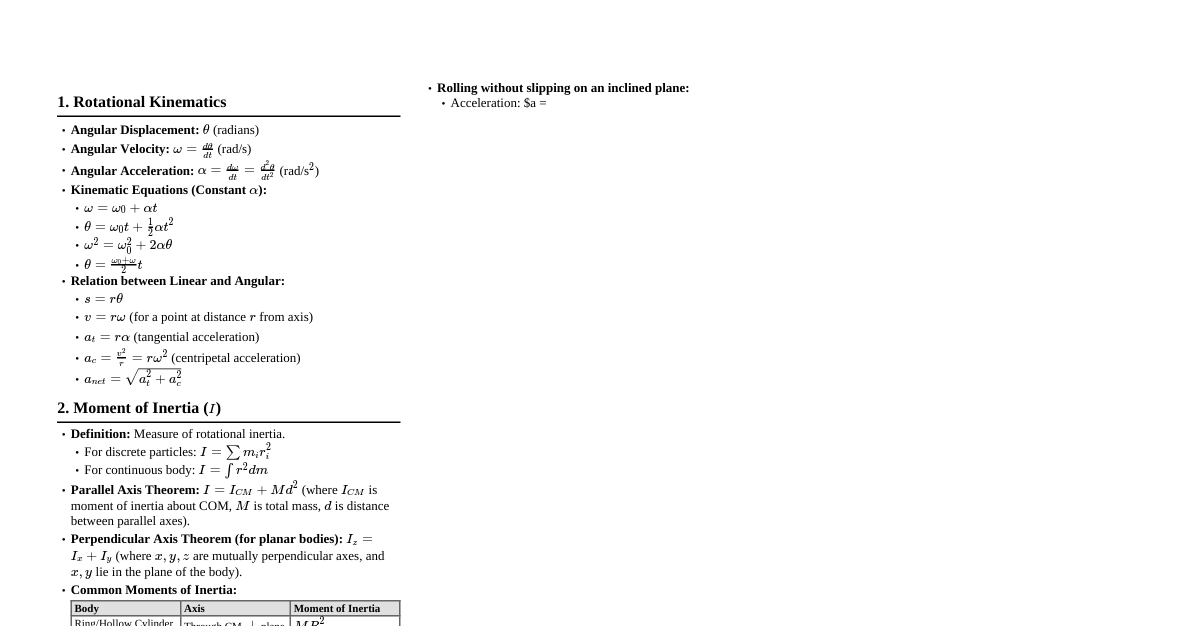
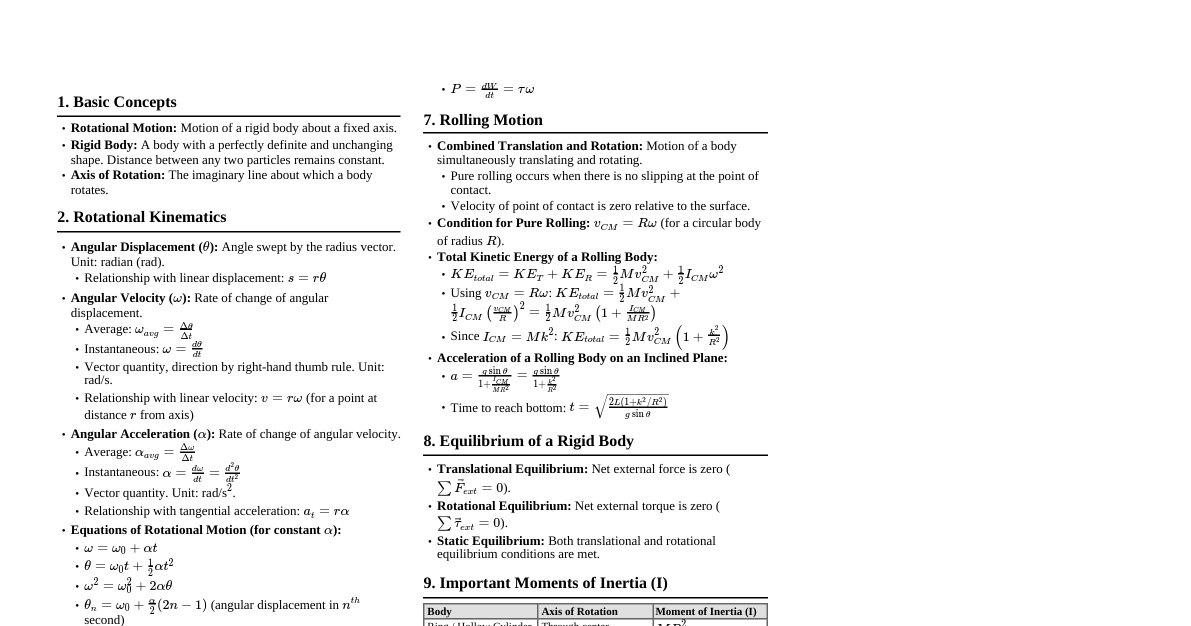
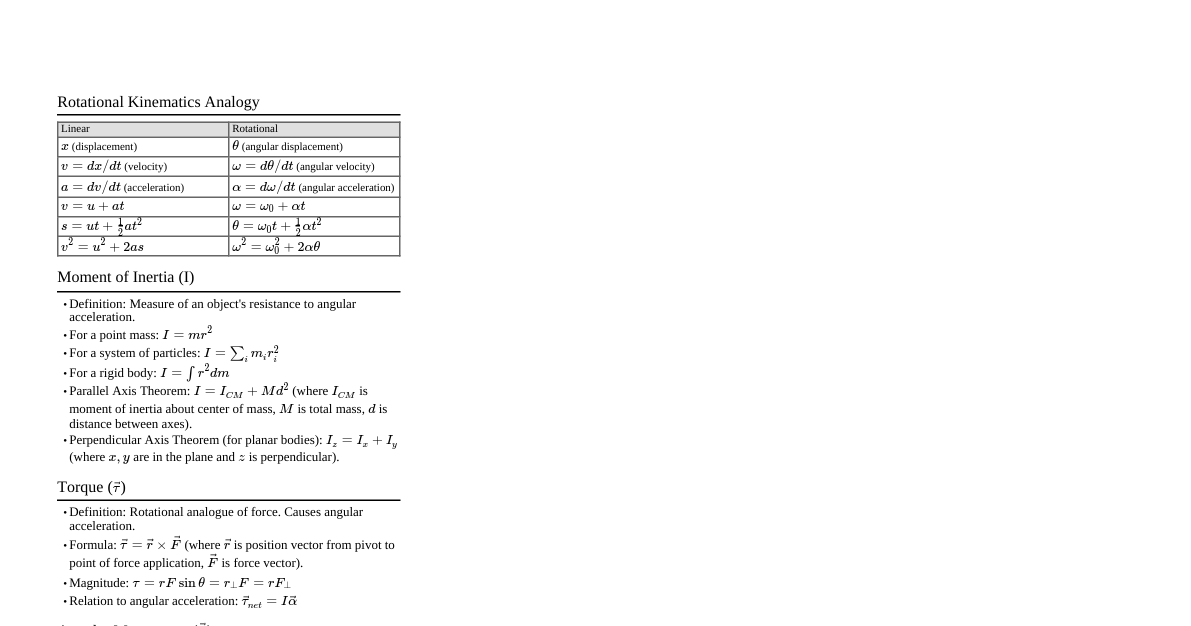
Rotational Kinematics Angular Displacement: $\theta$ (radians) Angular Velocity: $\omega = \frac{d\theta}{dt}$ (rad/s) Angular Acceleration: $\alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2}$ (rad/s$^2$) Kinematic Equations (for constant $\alpha$): $\omega = \omega_0 + \alpha t$ $\theta = \omega_0 t + \frac{1}{2}\alpha t^2$ $\omega^2 = \omega_0^2 + 2\alpha\theta$ $\theta_n = \omega_0 + \frac{\alpha}{2}(2n-1)$ (displacement in $n^{th}$ second) Relation between Linear and Angular: $v = r\omega$ (for a point at radius $r$ from axis) $a_t = r\alpha$ (tangential acceleration) $a_c = r\omega^2 = \frac{v^2}{r}$ (centripetal acceleration) $\vec{v} = \vec{\omega} \times \vec{r}$ $\vec{a} = \vec{\alpha} \times \vec{r} + \vec{\omega} \times (\vec{\omega} \times \vec{r})$ Moment of Inertia (I) Definition: $I = \sum m_i r_i^2$ (discrete particles) or $I = \int r^2 dm$ (continuous body) Units: kg m$^2$ Parallel Axis Theorem: $I = I_{CM} + Md^2$ (where $d$ is distance between parallel axes, $I_{CM}$ is MOI about axis through center of mass) Perpendicular Axis Theorem (for planar bodies): $I_z = I_x + I_y$ (where $x, y, z$ are mutually perpendicular axes, $x, y$ lie in the plane of the body) Radius of Gyration: $k = \sqrt{\frac{I}{M}}$, so $I = Mk^2$ Common Moments of Inertia Body Axis Moment of Inertia Ring (mass $M$, radius $R$) Through center, $\perp$ to plane $MR^2$ Disc (mass $M$, radius $R$) Through center, $\perp$ to plane $\frac{1}{2}MR^2$ Solid Cylinder (mass $M$, radius $R$) Along its axis $\frac{1}{2}MR^2$ Hollow Cylinder (mass $M$, radius $R$) Along its axis $MR^2$ Solid Sphere (mass $M$, radius $R$) Through its diameter $\frac{2}{5}MR^2$ Hollow Sphere (mass $M$, radius $R$) Through its diameter $\frac{2}{3}MR^2$ Rod (mass $M$, length $L$) Through CM, $\perp$ to rod $\frac{1}{12}ML^2$ Rod (mass $M$, length $L$) Through one end, $\perp$ to rod $\frac{1}{3}ML^2$ Torque ($\tau$) Definition: $\vec{\tau} = \vec{r} \times \vec{F}$ or $\tau = rF\sin\theta = F \cdot r_\perp$ (where $r_\perp$ is perpendicular distance from axis to line of action of force) Units: N m Relation to Angular Acceleration: $\tau = I\alpha$ (Rotational equivalent of $F=ma$) Power: $P = \vec{\tau} \cdot \vec{\omega} = \tau\omega$ Work Done by Torque: $W = \int \tau d\theta$ Angular Momentum ($\vec{L}$) For a particle: $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times (m\vec{v})$ For a rigid body: $\vec{L} = I\vec{\omega}$ Units: kg m$^2$/s or J s Relation to Torque: $\vec{\tau}_{ext} = \frac{d\vec{L}}{dt}$ (Rotational equivalent of $\vec{F} = \frac{d\vec{p}}{dt}$) Conservation of Angular Momentum: If $\vec{\tau}_{ext} = 0$, then $\vec{L} = \text{constant}$. $I_1\omega_1 = I_2\omega_2$ Rotational Kinetic Energy $KE_{rot} = \frac{1}{2}I\omega^2$ Total Kinetic Energy (for rolling without slipping): $KE_{total} = KE_{trans} + KE_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ Rolling Motion Rolling without slipping: $v_{CM} = R\omega$ and $a_{CM} = R\alpha$ Condition for rolling without slipping: $f_s \le \mu_s N$ Velocity of a point on the rim: $\vec{v}_P = \vec{v}_{CM} + \vec{v}_{P,rel}$ Instantaneous Axis of Rotation (IAR): For pure rolling, the point of contact with the ground is instantaneously at rest. MOI about IAR is $I_{IAR} = I_{CM} + MR^2$. Kinetic Energy using IAR: $KE = \frac{1}{2}I_{IAR}\omega^2$ Motion on an Inclined Plane (Rolling without slipping) Acceleration: $a = \frac{g\sin\theta}{1 + I_{CM}/(MR^2)}$ Friction force: $f_s = \frac{Mg\sin\theta}{1 + MR^2/I_{CM}}$ For rolling without slipping, $f_s \le \mu_s Mg\cos\theta$. Velocity at bottom: $v = \sqrt{\frac{2gh}{1 + I_{CM}/(MR^2)}}$ Order of acceleration (fastest to slowest): Solid sphere $>$ Disc $>$ Ring