Circular Motion
Cheatsheet Content
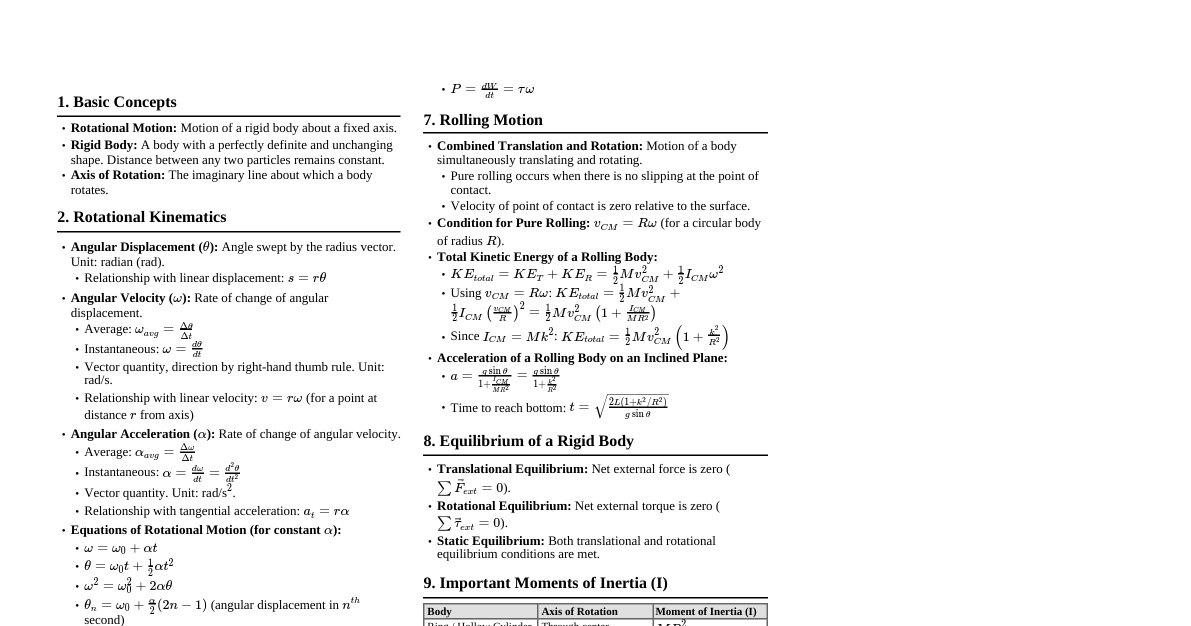
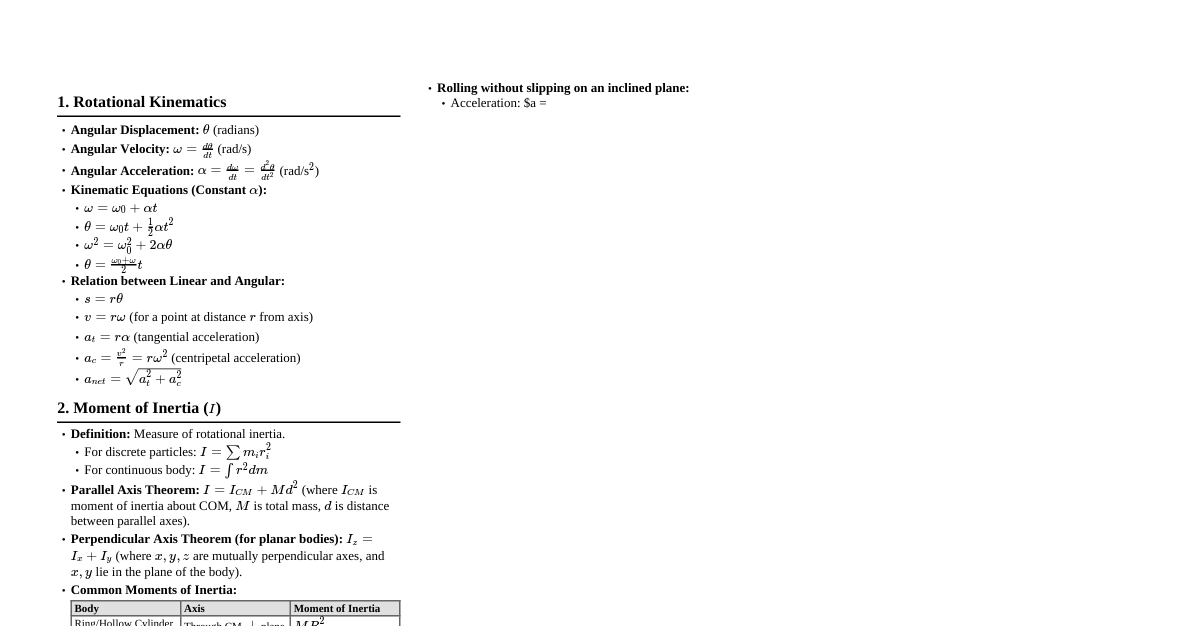
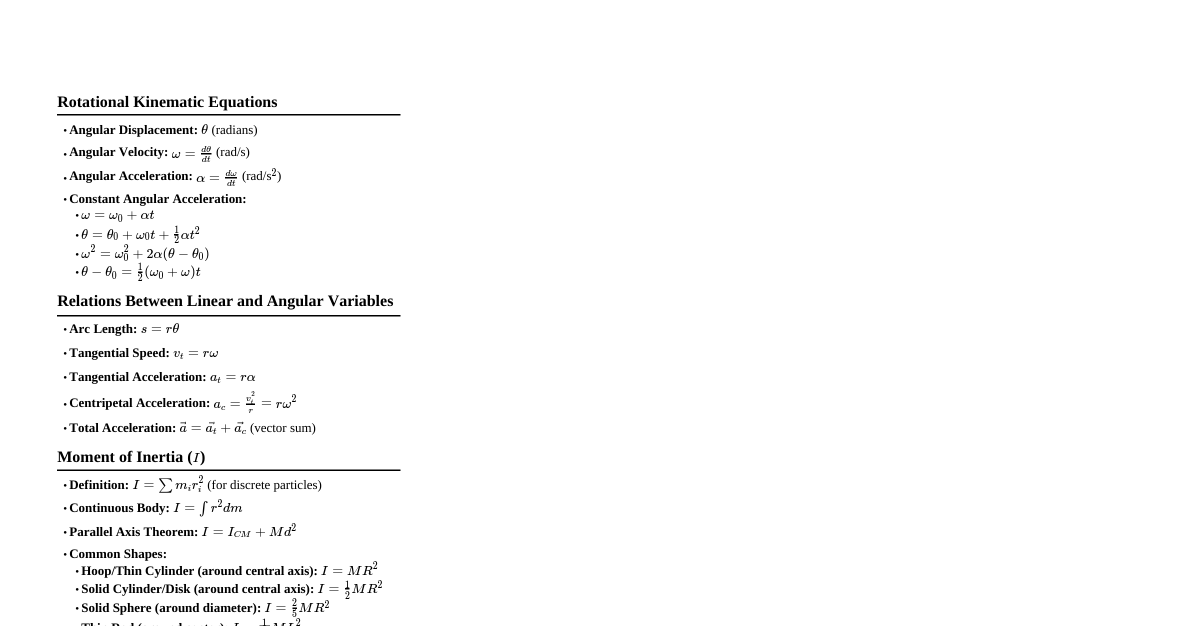
### Introduction Circular motion describes the movement of an object along the circumference of a circle or rotation along a circular path. It can be uniform (constant speed) or non-uniform (changing speed). ### Uniform Circular Motion (UCM) - **Constant Speed:** The magnitude of velocity is constant, but its direction continuously changes. - **Period (T):** Time taken for one complete revolution. $$T = \frac{2\pi r}{v}$$ where $r$ is the radius and $v$ is the speed. - **Frequency (f):** Number of revolutions per unit time. $$f = \frac{1}{T}$$ - **Angular Speed ($\omega$):** Rate of change of angular displacement. $$\omega = \frac{2\pi}{T} = 2\pi f = \frac{v}{r}$$ Units: radians per second (rad/s). ### Centripetal Force ($F_c$) - **Definition:** The force required to keep an object moving in a circular path. It always points towards the center of the circle. - **Formula:** $$F_c = \frac{mv^2}{r} = m\omega^2 r$$ where $m$ is mass, $v$ is tangential speed, $r$ is radius, and $\omega$ is angular speed. - **Direction:** Perpendicular to the velocity vector, towards the center of the circle. - **Nature:** Not a fundamental force; it's the net force causing circular motion (e.g., tension, gravity, friction). ### Centripetal Acceleration ($a_c$) - **Definition:** The acceleration associated with the change in direction of velocity in circular motion. - **Formula:** $$a_c = \frac{v^2}{r} = \omega^2 r$$ - **Direction:** Always towards the center of the circle, parallel to the centripetal force. ### Non-Uniform Circular Motion - **Changing Speed:** Both the magnitude and direction of velocity change. - **Tangential Acceleration ($a_t$):** Causes the change in the magnitude of velocity. $$a_t = \frac{dv}{dt} = r\alpha$$ where $\alpha$ is angular acceleration. - **Angular Acceleration ($\alpha$):** Rate of change of angular speed. $$\alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2}$$ Units: radians per second squared (rad/s$^2$). - **Total Acceleration ($a_{total}$):** Vector sum of tangential and centripetal acceleration. $$a_{total} = \sqrt{a_t^2 + a_c^2}$$ The angle $\phi$ that $a_{total}$ makes with the radius vector is given by $\tan\phi = \frac{a_t}{a_c}$. ### Examples & Applications - **Conical Pendulum:** Tension in the string provides the centripetal force. $$T \sin\theta = \frac{mv^2}{r}$$ $$T \cos\theta = mg$$ - **Banked Curves:** The normal force and friction provide the necessary centripetal force to prevent skidding. - Ideal banking angle (no friction): $\tan\theta = \frac{v^2}{rg}$ - **Vertical Circular Motion:** - **Top of loop:** Minimum speed $v_{min} = \sqrt{rg}$ for the object to complete the loop (normal force $N \ge 0$). - **Bottom of loop:** Normal force $N = mg + \frac{mv^2}{r}$. - **Friction and Circular Motion:** Friction often provides the centripetal force on flat turns. $$F_f = \mu_s N \ge \frac{mv^2}{r}$$ Maximum speed for no skidding: $v_{max} = \sqrt{\mu_s rg}$ ### Rotational Kinematics Analogous to linear kinematics: | Linear | Rotational | |---|---| | Displacement: $x$ | Angular Displacement: $\theta$ | | Velocity: $v = \frac{dx}{dt}$ | Angular Velocity: $\omega = \frac{d\theta}{dt}$ | | Acceleration: $a = \frac{dv}{dt}$ | Angular Acceleration: $\alpha = \frac{d\omega}{dt}$ | **Equations (constant angular acceleration):** 1. $\omega = \omega_0 + \alpha t$ 2. $\theta = \theta_0 + \omega_0 t + \frac{1}{2}\alpha t^2$ 3. $\omega^2 = \omega_0^2 + 2\alpha (\theta - \theta_0)$ 4. $\theta = \theta_0 + \frac{1}{2}(\omega_0 + \omega)t$