Waves & Oscillations (Class 12
Cheatsheet Content
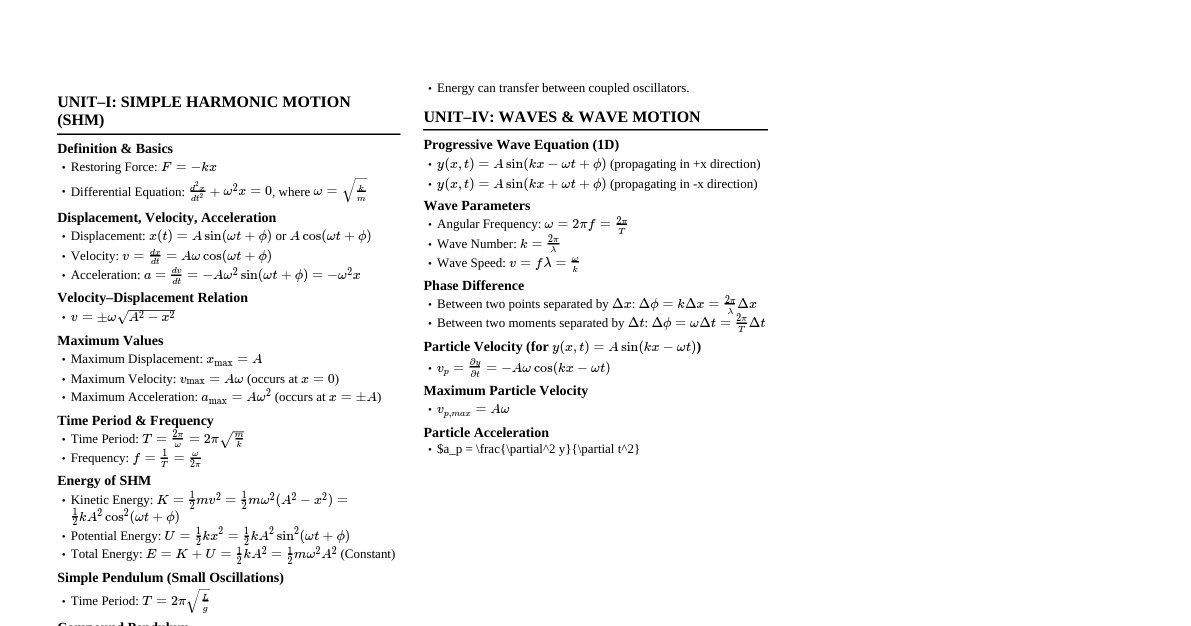
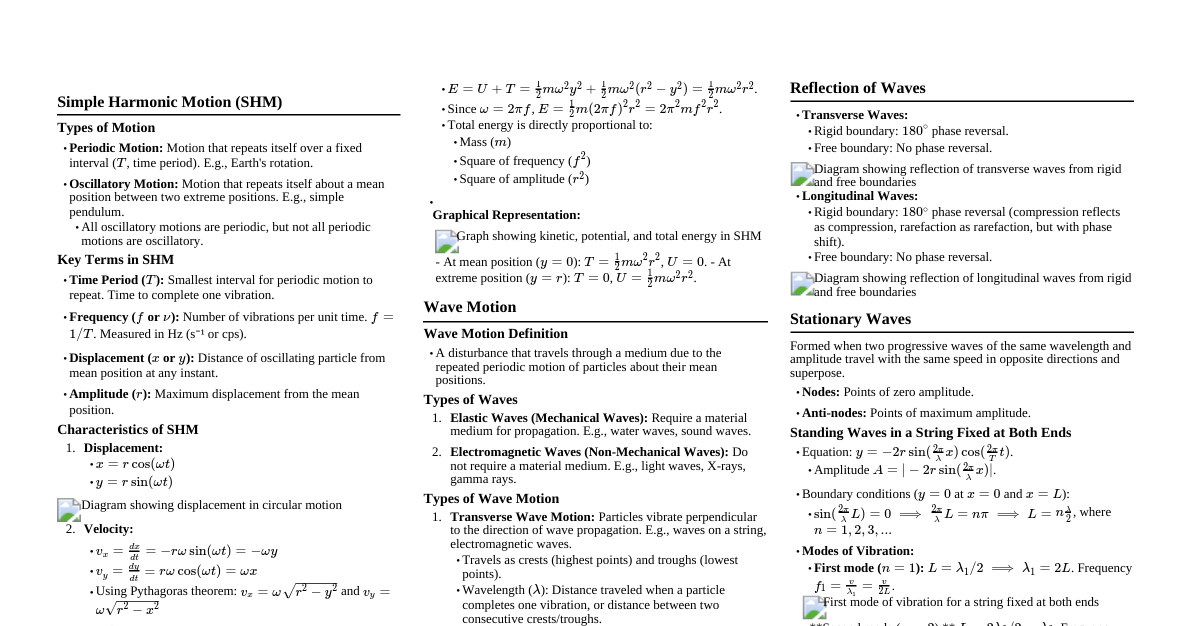
### Simple Harmonic Motion (SHM) #### 1. Definition and Basic Equation Simple Harmonic Motion (SHM) is a special type of periodic motion where the restoring force acting on a particle is directly proportional to its displacement from the equilibrium position and always directed towards that equilibrium position. This is the defining characteristic of SHM. $$F = -kx$$ - $F$: Restoring force (in Newtons, N) - $k$: Force constant or spring constant (in N/m). It represents the stiffness of the spring or the strength of the restoring force per unit displacement. - $x$: Displacement from the equilibrium position (in meters, m). The negative sign indicates that the restoring force always acts opposite to the displacement, pushing or pulling the object back to equilibrium. **Example 1.1 (Force):** A spring has a spring constant of $k = 100 \text{ N/m}$. If it is stretched by $0.05 \text{ m}$ from its equilibrium position, the restoring force exerted by the spring is $F = -(100 \text{ N/m})(0.05 \text{ m}) = -5 \text{ N}$. The force is $5 \text{ N}$ towards the equilibrium. #### 2. Characteristics and Kinematics of SHM The motion of a particle executing SHM can be described mathematically using sinusoidal functions. - **Displacement ($x$):** The position of the particle from equilibrium as a function of time. $$x(t) = A \sin(\omega t + \phi)$$ or $$x(t) = A \cos(\omega t + \phi)$$ - $A$: **Amplitude** (maximum displacement from equilibrium, in m). - $\omega$: **Angular frequency** (in radians/second, rad/s). It's related to the system's properties: $\omega = \sqrt{k/m}$, where $m$ is the mass (in kg). - $\phi$: **Initial phase angle** (or phase constant, in radians). Determines the position of the particle at $t=0$. **Example 1.2 (Displacement):** A mass of $0.5 \text{ kg}$ is attached to a spring with $k = 20 \text{ N/m}$. The amplitude is $0.1 \text{ m}$ and initial phase is $0$. $\omega = \sqrt{20/0.5} = \sqrt{40} \approx 6.32 \text{ rad/s}$. The displacement equation is $x(t) = 0.1 \sin(6.32 t)$. - **Velocity ($v$):** The rate of change of displacement. $$v(t) = \frac{dx}{dt} = A\omega \cos(\omega t + \phi)$$ or $$v(t) = -A\omega \sin(\omega t + \phi)$$ - **Maximum velocity:** $v_{max} = A\omega$. This occurs when the particle passes through the equilibrium position ($x=0$). **Example 1.3 (Velocity):** For the system in Example 1.2, $v(t) = (0.1)(6.32) \cos(6.32 t) = 0.632 \cos(6.32 t)$. The maximum velocity is $v_{max} = (0.1)(6.32) = 0.632 \text{ m/s}$. - **Acceleration ($a$):** The rate of change of velocity. $$a(t) = \frac{dv}{dt} = -A\omega^2 \sin(\omega t + \phi) = -\omega^2 x(t)$$ - **Maximum acceleration:** $a_{max} = A\omega^2$. This occurs at the extreme positions ($x=\pm A$). This equation is a direct consequence of $F=ma$ and $F=-kx$, leading to $ma = -kx \implies a = -(k/m)x = -\omega^2 x$. **Example 1.4 (Acceleration):** For the system in Example 1.2, $a(t) = -(6.32)^2 (0.1 \sin(6.32 t)) = -4 \sin(6.32 t)$. The maximum acceleration is $a_{max} = (0.1)(6.32)^2 = 4 \text{ m/s}^2$. - **Time Period ($T$):** The time taken for one complete oscillation (cycle). $$T = \frac{2\pi}{\omega} = 2\pi\sqrt{\frac{m}{k}}$$ (for spring-mass system) **Example 1.5 (Time Period):** For the system in Example 1.2, $T = 2\pi / 6.32 \approx 0.99 \text{ s}$. - **Frequency ($f$ or $\nu$):** The number of complete oscillations per second. $$f = \frac{1}{T} = \frac{\omega}{2\pi} = \frac{1}{2\pi}\sqrt{\frac{k}{m}}$$ **Example 1.6 (Frequency):** For the system in Example 1.2, $f = 1 / 0.99 \approx 1.01 \text{ Hz}$. #### 3. Energy in SHM In an ideal (undamped) SHM system, mechanical energy is conserved. It continuously converts between kinetic and potential energy. - **Kinetic Energy (KE):** Energy due to motion. $$KE = \frac{1}{2}mv^2 = \frac{1}{2}m A^2 \omega^2 \cos^2(\omega t + \phi) = \frac{1}{2} k (A^2 - x^2)$$ - Maximum at equilibrium ($x=0$, $v=v_{max}$). **Example 1.7 (KE):** For the system in Example 1.2, at $x=0.05 \text{ m}$, $KE = \frac{1}{2}(20)((0.1)^2 - (0.05)^2) = 10(0.01 - 0.0025) = 10(0.0075) = 0.075 \text{ J}$. - **Potential Energy (PE):** Stored energy due to displacement (e.g., in a spring). $$PE = \frac{1}{2}kx^2 = \frac{1}{2} k A^2 \sin^2(\omega t + \phi)$$ - Maximum at extreme positions ($x=\pm A$). **Example 1.8 (PE):** For the system in Example 1.2, at $x=0.05 \text{ m}$, $PE = \frac{1}{2}(20)(0.05)^2 = 10(0.0025) = 0.025 \text{ J}$. - **Total Energy (TE):** The sum of kinetic and potential energy. $$TE = KE + PE = \frac{1}{2}kA^2 = \frac{1}{2}m A^2 \omega^2$$ - Total mechanical energy remains constant in ideal SHM and is proportional to the square of the amplitude. **Example 1.9 (Total Energy):** For the system in Example 1.2, $TE = \frac{1}{2}(20)(0.1)^2 = 10(0.01) = 0.1 \text{ J}$. Note that $KE + PE = 0.075 \text{ J} + 0.025 \text{ J} = 0.1 \text{ J}$, confirming energy conservation. #### 4. Examples of SHM Systems - **Spring-Mass System:** - **Horizontal:** $T = 2\pi \sqrt{m/k}$. The mass oscillates on a frictionless horizontal surface. - **Vertical:** $T = 2\pi \sqrt{m/k}$. When a mass is hung from a vertical spring, the equilibrium position shifts due to gravity, but the period of oscillation remains the same as for a horizontal spring if the spring constant $k$ and mass $m$ are the same. **Example 1.10 (Spring-Mass Period):** A $0.2 \text{ kg}$ mass is attached to a vertical spring with $k = 50 \text{ N/m}$. $T = 2\pi \sqrt{0.2/50} = 2\pi \sqrt{0.004} \approx 2\pi (0.0632) \approx 0.397 \text{ s}$. - **Simple Pendulum:** A point mass suspended by a massless, inextensible string. For **small angles of displacement** (typically $\theta \le 10^\circ$), its motion is approximately SHM. $$T = 2\pi \sqrt{L/g}$$ - $L$: Length of the pendulum (in m). - $g$: Acceleration due to gravity (in m/s²). **Example 1.11 (Simple Pendulum Period):** A simple pendulum of length $1 \text{ m}$ is in a place where $g=9.8 \text{ m/s}^2$. $T = 2\pi \sqrt{1/9.8} \approx 2\pi (0.319) \approx 2.00 \text{ s}$. - **Compound Pendulum (or Physical Pendulum):** Any rigid body oscillating about a fixed horizontal axis not passing through its center of mass. $$T = 2\pi \sqrt{I/mgL}$$ - $I$: Moment of inertia of the body about the axis of oscillation. - $m$: Mass of the body. - $L$: Distance from the pivot to the center of mass. - **Torsional Pendulum:** A body suspended by a wire, oscillating due to torsional (twisting) forces. $$T = 2\pi \sqrt{I/\kappa}$$ - $I$: Moment of inertia of the body about the suspension wire. - $\kappa$: Torsional constant of the wire (restoring torque per unit angular twist). #### 5. Phase Difference When two SHMs of the same frequency are involved, their relative timing is described by the phase difference. If $x_1 = A_1 \sin(\omega t + \phi_1)$ and $x_2 = A_2 \sin(\omega t + \phi_2)$, then the phase difference is $\Delta\phi = |\phi_1 - \phi_2|$. - **In phase:** $\Delta\phi = 2n\pi$ (where $n=0, 1, 2, ...$). Both objects reach their maximums and minimums at the same time. - **Out of phase (anti-phase):** $\Delta\phi = (2n+1)\pi$. One reaches maximum when the other reaches minimum. - **Quadrature (90° out of phase):** $\Delta\phi = (n + 1/2)\pi$. One reaches maximum when the other is at equilibrium. #### 6. Superposition of SHMs When two or more SHMs act simultaneously on a particle, the resultant motion is found by summing their displacements (Principle of Superposition). - **Two SHMs in the same direction, same frequency:** If $x_1 = A_1 \sin(\omega t)$ and $x_2 = A_2 \sin(\omega t + \delta)$, the resultant displacement is $x = x_1 + x_2 = R \sin(\omega t + \alpha)$, where: $$R = \sqrt{A_1^2 + A_2^2 + 2A_1 A_2 \cos\delta}$$ $$\tan\alpha = \frac{A_2 \sin\delta}{A_1 + A_2 \cos\delta}$$ - $R$ is the resultant amplitude, $\alpha$ is the resultant phase. **Example 1.12 (Superposition):** Two oscillations $x_1 = 3 \sin(\omega t)$ and $x_2 = 4 \sin(\omega t + \pi/2)$. Here $A_1=3, A_2=4, \delta=\pi/2$. $R = \sqrt{3^2 + 4^2 + 2(3)(4)\cos(\pi/2)} = \sqrt{9+16+0} = \sqrt{25} = 5$. $\tan\alpha = \frac{4 \sin(\pi/2)}{3 + 4 \cos(\pi/2)} = \frac{4(1)}{3+0} = 4/3 \implies \alpha \approx 0.927 \text{ rad}$. Resultant: $x = 5 \sin(\omega t + 0.927)$. ### Damped Oscillations #### 1. Definition Damped oscillations are oscillations where the amplitude decreases over time due to the presence of dissipative forces, such as air resistance, friction, or internal fluid resistance. These forces remove energy from the oscillating system. #### 2. Equation of Motion The damping force is typically proportional to the velocity and acts opposite to the direction of motion: $F_d = -bv$, where $b$ is the damping coefficient. The equation of motion for a damped spring-mass system becomes: $$m\frac{d^2x}{dt^2} + b\frac{dx}{dt} + kx = 0$$ - $m$: mass - $b$: damping coefficient (in Ns/m or kg/s) - $k$: spring constant #### 3. Solutions and Types of Damping The behavior of the damped system depends on the magnitude of the damping coefficient $b$ relative to $k$ and $m$. - **Underdamped Oscillation ($b^2 4mk$):** - The system returns to equilibrium very slowly without oscillating. - The damping force is so strong that it prevents any oscillatory motion. It takes a longer time to return to equilibrium compared to critical damping. **Example 2.3 (Overdamped Oscillation):** For the system in Example 2.1, if $b=30 \text{ Ns/m}$, then $b^2 = 900$, which is greater than $4mk=400$. The system is overdamped. ### Forced Oscillations & Resonance #### 1. Forced Oscillations When an external periodic force is continuously applied to an oscillating system, the system undergoes forced oscillations. The system is forced to oscillate at the frequency of the external driving force ($\omega_d$). The equation of motion for a forced, damped oscillator is: $$m\frac{d^2x}{dt^2} + b\frac{dx}{dt} + kx = F_0 \sin(\omega_d t)$$ - $F_0$: Amplitude of the driving force. - $\omega_d$: Angular frequency of the driving force. #### 2. Steady-State Solution After an initial transient period, the system settles into a steady-state oscillation at the driving frequency $\omega_d$ with a constant amplitude $A$. $$A = \frac{F_0}{\sqrt{m^2(\omega_d^2 - \omega_0^2)^2 + b^2\omega_d^2}}$$ - $\omega_0 = \sqrt{k/m}$: The natural (undamped) angular frequency of the oscillator. **Example 3.1 (Forced Oscillation Amplitude):** A system with $m=1 \text{ kg}$, $k=100 \text{ N/m}$, $b=2 \text{ Ns/m}$ is driven by a force $F_0 = 10 \text{ N}$ at $\omega_d = 5 \text{ rad/s}$. $\omega_0 = \sqrt{100/1} = 10 \text{ rad/s}$. $A = \frac{10}{\sqrt{1^2(5^2 - 10^2)^2 + 2^2(5^2)}} = \frac{10}{\sqrt{(25-100)^2 + 4(25)}} = \frac{10}{\sqrt{(-75)^2 + 100}} = \frac{10}{\sqrt{5625+100}} = \frac{10}{\sqrt{5725}} \approx \frac{10}{75.66} \approx 0.132 \text{ m}$. #### 3. Resonance - **Definition:** Resonance occurs when the driving frequency ($\omega_d$) is equal or very close to the natural frequency ($\omega_0$) of the oscillating system. - **Effect:** At resonance, the amplitude of oscillation becomes maximum. This is because the driving force is applying energy to the system at the most efficient rate. - **Resonance Frequency ($\omega_r$):** For maximum amplitude (when damping is present), the resonance frequency is slightly different from the natural frequency: $$\omega_r = \sqrt{\omega_0^2 - (b/2m)^2}$$ - If damping is small ($b \approx 0$), then $\omega_r \approx \omega_0$. - **Sharpness of Resonance:** The smaller the damping coefficient ($b$), the sharper the resonance peak (meaning the amplitude rises very steeply near $\omega_r$) and the higher the maximum amplitude achieved. Large damping leads to a broad, flat resonance curve. **Example 3.2 (Resonance Frequency):** For the system in Example 3.1, $m=1 \text{ kg}$, $k=100 \text{ N/m}$, $b=2 \text{ Ns/m}$. $\omega_0 = 10 \text{ rad/s}$. $\omega_r = \sqrt{10^2 - (2/(2 \cdot 1))^2} = \sqrt{100 - 1^2} = \sqrt{99} \approx 9.95 \text{ rad/s}$. Notice $\omega_r$ is very close to $\omega_0$ because damping is small. ### Wave Motion #### 1. Definition A wave is a disturbance that propagates through a medium or space, transferring energy and momentum from one point to another without any net transport of matter. The particles of the medium oscillate about their mean positions, but they do not travel along with the wave. #### 2. Types of Waves - **Transverse Waves:** - The particles of the medium oscillate perpendicular to the direction of wave propagation. - They consist of crests (points of maximum upward displacement) and troughs (points of maximum downward displacement). - **Examples:** Waves on a stretched string, electromagnetic waves (light, radio waves), water waves (surface waves, which are a combination of transverse and longitudinal). **Example:** Plucking a guitar string creates transverse waves that travel along the string. - **Longitudinal Waves:** - The particles of the medium oscillate parallel to the direction of wave propagation. - They consist of compressions (regions where particles are closer together, higher pressure) and rarefactions (regions where particles are farther apart, lower pressure). - **Examples:** Sound waves in air, P-waves in earthquakes, waves in a spring (slinky) when pushed and pulled. **Example:** When you speak, sound waves travel through the air as compressions and rarefactions. - **Mechanical Waves:** - Require a material medium (solid, liquid, or gas) for their propagation. - They are caused by the oscillation of particles of the medium. - **Examples:** Sound waves, water waves, seismic waves, waves on a string. **Example:** Sound cannot travel in a vacuum because there are no particles to transmit the vibrations. - **Electromagnetic Waves:** - Do not require a material medium for propagation and can travel through a vacuum. - They consist of oscillating electric and magnetic fields perpendicular to each other and to the direction of propagation. - **Examples:** Light, radio waves, microwaves, X-rays, gamma rays. **Example:** Sunlight travels through the vacuum of space to reach Earth. #### 3. Basic Wave Parameters These parameters describe the characteristics of a wave: - **Amplitude ($A$):** The maximum displacement or disturbance of the particles of the medium from their equilibrium position. (Units: meters for displacement, Pa for pressure waves, etc.) - **Wavelength ($\lambda$):** The distance between two consecutive points in the same phase (e.g., two successive crests, two successive troughs, or two successive compressions). (Units: meters, m) - **Frequency ($f$ or $\nu$):** The number of complete wave cycles (oscillations) passing a given point per second. (Units: Hertz, Hz, where $1 \text{ Hz} = 1 \text{ cycle/second}$) - **Time Period ($T$):** The time taken for one complete wave cycle to pass a given point. It is the reciprocal of frequency. $$T = \frac{1}{f}$$ (Units: seconds, s) - **Wave Speed ($v$):** The speed at which the wave disturbance propagates through the medium. It is the product of frequency and wavelength. $$v = f\lambda = \frac{\lambda}{T}$$ (Units: meters/second, m/s) **Example 4.1 (Wave Speed):** A sound wave has a frequency of $500 \text{ Hz}$ and a wavelength of $0.68 \text{ m}$. Its speed is $v = (500 \text{ Hz})(0.68 \text{ m}) = 340 \text{ m/s}$. - **Angular Wave Number ($k$):** Also known as propagation constant. It is related to wavelength. $$k = \frac{2\pi}{\lambda}$$ (Units: radians/meter, rad/m) - **Angular Frequency ($\omega$):** Related to frequency. $$\omega = 2\pi f$$ (Units: radians/second, rad/s) #### 4. Equation of a Progressive Wave A progressive (or traveling) wave is one that moves continuously in a particular direction, transporting energy. Its displacement $y$ at position $x$ and time $t$ can be described by: $$y(x,t) = A \sin(kx \pm \omega t + \phi)$$ - $y(x,t)$: Displacement of the particle at position $x$ and time $t$. - $A$: Amplitude. - $k$: Angular wave number. - $\omega$: Angular frequency. - $\phi$: Initial phase angle (determines $y$ at $x=0, t=0$). - **Direction of propagation:** - $y(x,t) = A \sin(kx - \omega t + \phi)$: Wave moving in the **positive x-direction**. - $y(x,t) = A \sin(kx + \omega t + \phi)$: Wave moving in the **negative x-direction**. **Example 4.2 (Wave Equation):** A wave has amplitude $0.02 \text{ m}$, wavelength $0.5 \text{ m}$, frequency $4 \text{ Hz}$, and is moving in the positive x-direction with $\phi=0$. $k = 2\pi/0.5 = 4\pi \text{ rad/m}$. $\omega = 2\pi(4) = 8\pi \text{ rad/s}$. Equation: $y(x,t) = 0.02 \sin(4\pi x - 8\pi t)$. - **Particle velocity ($v_p$):** The velocity of the individual medium particles as they oscillate. It's the partial derivative of displacement with respect to time. $$v_p = \frac{\partial y}{\partial t} = -A\omega \cos(kx \pm \omega t + \phi)$$ (for $y = A \sin(kx - \omega t + \phi)$) **Example 4.3 (Particle Velocity):** For the wave in Example 4.2, $v_p = \frac{\partial}{\partial t} [0.02 \sin(4\pi x - 8\pi t)] = 0.02 \cos(4\pi x - 8\pi t) \cdot (-8\pi) = -0.16\pi \cos(4\pi x - 8\pi t)$. The maximum particle speed is $0.16\pi \text{ m/s}$. - **Particle acceleration ($a_p$):** The acceleration of the individual medium particles. $$a_p = \frac{\partial^2 y}{\partial t^2} = -A\omega^2 \sin(kx \pm \omega t + \phi) = -\omega^2 y(x,t)$$ (for $y = A \sin(kx - \omega t + \phi)$) - **Relation between particle velocity and wave velocity:** $$v_p = -v \frac{\partial y}{\partial x}$$ #### 5. Speed of Mechanical Waves The speed of a mechanical wave depends on the properties of the medium. - **Transverse wave on a stretched string:** $$v = \sqrt{T/\mu}$$ - $T$: Tension in the string (in N). - $\mu$: Mass per unit length (linear mass density) of the string (in kg/m). - Higher tension means faster wave. Thicker (more massive) string means slower wave. **Example 4.4 (String Wave Speed):** A string has mass $0.005 \text{ kg}$ and length $2 \text{ m}$. It's under a tension of $80 \text{ N}$. $\mu = 0.005 \text{ kg} / 2 \text{ m} = 0.0025 \text{ kg/m}$. $v = \sqrt{80 / 0.0025} = \sqrt{32000} \approx 178.9 \text{ m/s}$. - **Longitudinal wave in a fluid (e.g., sound):** $$v = \sqrt{B/\rho}$$ - $B$: Bulk modulus of the fluid (in Pa). Measures resistance to compression. - $\rho$: Density of the fluid (in kg/m³). - Higher bulk modulus (less compressible fluid) means faster wave. Denser fluid means slower wave. - **Longitudinal wave in a solid rod:** $$v = \sqrt{Y/\rho}$$ - $Y$: Young's modulus of the solid (in Pa). Measures stiffness. - $\rho$: Density of the solid (in kg/m³). - **Speed of sound in gas (Laplace's correction):** - Historically, Newton's formula ($v = \sqrt{P/\rho}$) was incorrect because it assumed an isothermal process. - **Laplace's correction** correctly accounted for the adiabatic nature of sound propagation in gases. $$v = \sqrt{\gamma P/\rho}$$ - $\gamma = C_p/C_v$: Ratio of specific heats for the gas (dimensionless). For air, $\gamma \approx 1.4$. - $P$: Pressure of the gas (in Pa). - $\rho$: Density of the gas (in kg/m³). - Since $P/\rho \propto T$ (from ideal gas law), the speed of sound in a gas is primarily dependent on its temperature and composition, not pressure. **Example 4.5 (Speed of Sound in Air):** For air at $0^\circ C$, $P=1.01 \times 10^5 \text{ Pa}$, $\rho=1.29 \text{ kg/m}^3$, $\gamma=1.4$. $v = \sqrt{1.4 \times (1.01 \times 10^5) / 1.29} \approx \sqrt{1.096 \times 10^5} \approx 331 \text{ m/s}$. #### 6. Intensity of a Wave - **Intensity ($I$):** The average power transmitted by a wave per unit area perpendicular to the direction of wave propagation. It describes how "strong" the wave is. $$I = \frac{\text{Power}}{\text{Area}}$$ (Units: Watts/meter², W/m²) - **Relationship with Amplitude:** For mechanical waves, intensity is proportional to the square of the amplitude and the square of the angular frequency. $$I \propto A^2 \omega^2$$ - **Inverse Square Law:** For a point source emitting waves uniformly in all directions in an isotropic medium, the intensity decreases with the square of the distance ($r$) from the source. $$I \propto \frac{1}{r^2}$$ This means if you double the distance, the intensity becomes one-fourth. **Example 4.6 (Intensity):** A sound source produces $0.1 \text{ W}$ of power. The intensity at a distance of $2 \text{ m}$ is: Assuming spherical spreading, Area $A = 4\pi r^2 = 4\pi (2)^2 = 16\pi \text{ m}^2$. $I = 0.1 \text{ W} / (16\pi \text{ m}^2) \approx 0.00199 \text{ W/m}^2$. ### Superposition of Waves #### 1. Principle of Superposition When two or more waves travel simultaneously through the same medium, the resultant displacement of any particle in the medium at any instant is the vector sum of the displacements produced by the individual waves at that particle at that instant. $$y_{resultant} = y_1 + y_2 + y_3 + ...$$ This principle is fundamental to understanding interference, diffraction, and standing waves. #### 2. Interference of Waves Interference is the phenomenon where two or more waves overlap to form a resultant wave of greater, lower, or the same amplitude. - **Conditions for Sustained Interference:** 1. **Coherent sources:** The waves must have a constant phase difference (and thus the same frequency). 2. **Monochromatic sources:** For light waves, they should have a single wavelength (or frequency). 3. **Nearly equal amplitudes:** For clear interference patterns. 4. The sources should be close to each other. - **Constructive Interference:** - Occurs when two waves arrive at a point **in phase** (crest meets crest or trough meets trough). Their amplitudes add up, resulting in a larger amplitude and greater intensity. - **Phase difference:** $\Delta\phi = 2n\pi$ (where $n=0, 1, 2, ...$) - **Path difference:** $\Delta x = n\lambda$ (where $n=0, 1, 2, ...$) - **Resultant Intensity:** $I_{max} = (A_1 + A_2)^2$. If $A_1=A_2=A$, then $I_{max} = (2A)^2 = 4A^2$. **Example 5.1 (Constructive Interference):** Two sound waves from speakers are in phase and travel $3 \text{ m}$ and $4 \text{ m}$ respectively to a listener. If the wavelength is $1 \text{ m}$, the path difference is $\Delta x = 4-3 = 1 \text{ m}$. Since $1 \text{ m} = 1\lambda$, it's constructive interference ($n=1$). The listener hears a loud sound. - **Destructive Interference:** - Occurs when two waves arrive at a point **out of phase** (crest meets trough). Their amplitudes subtract, resulting in a smaller amplitude, or even zero amplitude, and lower intensity. - **Phase difference:** $\Delta\phi = (2n+1)\pi$ (where $n=0, 1, 2, ...$) - **Path difference:** $\Delta x = (n + 1/2)\lambda$ (where $n=0, 1, 2, ...$) - **Resultant Intensity:** $I_{min} = (A_1 - A_2)^2$. If $A_1=A_2=A$, then $I_{min} = 0$. **Example 5.2 (Destructive Interference):** Using the same speakers and wavelength as Example 5.1, suppose the path difference to another point is $3.5 \text{ m}$. Since $3.5 \text{ m} = (3 + 1/2)\lambda$, it's destructive interference ($n=3$). The listener hears a faint or no sound. #### 3. Standing Waves (Stationary Waves) Standing waves are formed when two identical progressive waves (same amplitude, frequency, and wavelength) traveling in opposite directions along the same line superimpose. They appear stationary, with points of zero displacement and points of maximum displacement fixed in space. - **Formation:** Imagine a wave reflecting off a boundary; the incident and reflected waves interfere to form a standing wave. - **Equation:** If $y_1 = A \sin(kx - \omega t)$ (incident) and $y_2 = A \sin(kx + \omega t)$ (reflected), then the resultant standing wave is: $$y_{resultant} = (2A \sin kx) \cos \omega t$$ - The amplitude of oscillation $2A \sin kx$ depends on position $x$, not time. - **Nodes:** - Points in the medium where the resultant displacement is permanently zero (amplitude is zero). Particles at nodes are always at rest. - Occur when $\sin kx = 0 \implies kx = n\pi \implies x = \frac{n\pi}{k} = \frac{n\pi}{2\pi/\lambda} = \frac{n\lambda}{2}$, where $n=0, 1, 2, ...$ - **Distance between two consecutive nodes:** $\lambda/2$. **Example 5.3 (Nodes):** For a string with $\lambda = 1 \text{ m}$, nodes occur at $x=0, 0.5 \text{ m}, 1 \text{ m}, 1.5 \text{ m}$, etc. - **Antinodes:** - Points in the medium where the resultant displacement is maximum (amplitude is $2A$). Particles at antinodes oscillate with maximum amplitude. - Occur when $\sin kx = \pm 1 \implies kx = (n + 1/2)\pi \implies x = \frac{(n + 1/2)\pi}{k} = \frac{(n + 1/2)\lambda}{2}$, where $n=0, 1, 2, ...$ - **Distance between two consecutive antinodes:** $\lambda/2$. - **Distance between a node and an adjacent antinode:** $\lambda/4$. - **Energy Transfer:** In a standing wave, there is no net transfer of energy across any plane. Energy is confined to the segments between nodes, oscillating between kinetic and potential forms. #### 4. Standing Waves in Strings (Fixed at Both Ends) When a string is fixed at both ends, these ends must be nodes. This boundary condition restricts the possible wavelengths and frequencies that can form standing waves. - **Possible Wavelengths:** $\lambda_n = \frac{2L}{n}$, where $n=1, 2, 3, ...$ - $L$: Length of the string. - **Possible Frequencies (Harmonics):** Using $v=f\lambda$, $f_n = \frac{v}{\lambda_n} = \frac{nv}{2L}$ - **Fundamental Frequency (First Harmonic, $n=1$):** $f_1 = \frac{v}{2L}$. This is the lowest possible frequency. - **Second Harmonic (First Overtone, $n=2$):** $f_2 = \frac{2v}{2L} = 2f_1$. - **Third Harmonic (Second Overtone, $n=3$):** $f_3 = \frac{3v}{2L} = 3f_1$. - In a string fixed at both ends, all integer multiples of the fundamental frequency (i.e., all harmonics) are possible. **Example 5.4 (String Harmonics):** A guitar string of length $0.6 \text{ m}$ has a wave speed of $300 \text{ m/s}$. Fundamental frequency $f_1 = 300 / (2 \cdot 0.6) = 300 / 1.2 = 250 \text{ Hz}$. Second harmonic $f_2 = 2 \cdot 250 = 500 \text{ Hz}$. #### 5. Standing Waves in Organ Pipes (Air Columns) Standing waves of sound are formed in air columns within pipes. The boundary conditions depend on whether the ends are open or closed. - **Open Organ Pipe (Open at both ends):** - Both ends are open, meaning they are points of maximum air displacement (antinodes). - **Wavelengths:** $\lambda_n = \frac{2L}{n}$, where $n=1, 2, 3, ...$ - **Frequencies:** $f_n = \frac{nv}{2L} = n f_1$ - Like a string fixed at both ends, an open organ pipe produces **all harmonics** (odd and even multiples of the fundamental frequency). **Example 5.5 (Open Pipe Harmonics):** An open organ pipe of length $0.5 \text{ m}$ (speed of sound $v=340 \text{ m/s}$). Fundamental frequency $f_1 = 340 / (2 \cdot 0.5) = 340 \text{ Hz}$. Second harmonic $f_2 = 2 \cdot 340 = 680 \text{ Hz}$. - **Closed Organ Pipe (Closed at one end, open at other):** - The closed end must be a node (zero displacement), and the open end must be an antinode (maximum displacement). - **Wavelengths:** $\lambda_n = \frac{4L}{2n-1}$, where $n=1, 2, 3, ...$ - **Frequencies:** $f_n = \frac{(2n-1)v}{4L} = (2n-1) f_1$ - A closed organ pipe produces **only odd harmonics** (odd multiples of the fundamental frequency). The first overtone is the third harmonic, the second overtone is the fifth harmonic, etc. **Example 5.6 (Closed Pipe Harmonics):** A closed organ pipe of length $0.5 \text{ m}$ (speed of sound $v=340 \text{ m/s}$). Fundamental frequency $f_1 = 340 / (4 \cdot 0.5) = 340 / 2 = 170 \text{ Hz}$. Next possible frequency (first overtone) is $f_3 = 3 f_1 = 3 \cdot 170 = 510 \text{ Hz}$. - **End Correction:** The antinode at an open end of a pipe is not exactly at the open end, but slightly outside it. This is due to the air molecules just outside the opening also participating in the oscillation. The effective length of the pipe is slightly longer than its physical length. - For an open end, the antinode is approximately $e = 0.6r$ outside the end, where $r$ is the radius of the pipe. - **Effective Lengths:** - Open pipe: $L_{eff} = L_{physical} + 2e$ - Closed pipe: $L_{eff} = L_{physical} + e$ ### Beats #### 1. Definition Beats are the periodic variations in the intensity (loudness) of sound heard when two sound waves of slightly different frequencies, traveling in the same direction, superimpose. The sound gets alternately louder and fainter. #### 2. Formation When two waves with slightly different frequencies $f_1$ and $f_2$ (and equal amplitudes for simplicity) interfere, their superposition results in a wave whose amplitude varies periodically. If $y_1 = A \sin(\omega_1 t)$ and $y_2 = A \sin(\omega_2 t)$, where $\omega_1 \approx \omega_2$. Using trigonometric identities, the resultant displacement is: $$y_{resultant} = [2A \cos(\frac{\omega_1 - \omega_2}{2} t)] \sin(\frac{\omega_1 + \omega_2}{2} t)$$ - The term $\sin(\frac{\omega_1 + \omega_2}{2} t)$ represents a wave with the average frequency. - The term $2A \cos(\frac{\omega_1 - \omega_2}{2} t)$ represents the slowly varying amplitude of the resultant wave. This is what causes the sensation of beats. #### 3. Beat Frequency - The intensity of sound is proportional to the square of the amplitude. The intensity is maximum when the amplitude is maximum (when $\cos(\frac{\omega_1 - \omega_2}{2} t) = \pm 1$) and minimum when the amplitude is zero. - A full cycle of amplitude variation (from maximum loudness to maximum loudness again) occurs when $\cos(\frac{\omega_1 - \omega_2}{2} t)$ goes through a full cycle. This happens twice for every cycle of the cosine term. - The frequency of the amplitude variation (and thus the frequency of the beats) is: $$f_{beat} = |f_1 - f_2|$$ - The number of beats heard per second is equal to the absolute difference between the frequencies of the two interfering waves. **Example 6.1 (Beat Frequency):** A tuning fork of $440 \text{ Hz}$ is sounded along with another tuning fork of unknown frequency. $5$ beats are heard per second. This means $|f_{unknown} - 440 \text{ Hz}| = 5 \text{ Hz}$. So, the unknown frequency could be $440 + 5 = 445 \text{ Hz}$ or $440 - 5 = 435 \text{ Hz}$. Further experiment (e.g., loading one fork with wax) would be needed to determine the exact frequency. ### Doppler Effect #### 1. Definition The Doppler effect is the apparent change in the frequency (and consequently wavelength) of a wave observed when there is relative motion between the source of the wave and the observer. It applies to all types of waves (sound, light, water waves). #### 2. General Formula (for sound waves) The general formula for the apparent frequency ($f'$) heard by an observer when both the source and observer are moving in a medium (like air for sound) is: $$f' = f \left( \frac{v \pm v_o}{v \mp v_s} \right)$$ - $f'$: Apparent frequency heard by the observer. - $f$: Original (actual) frequency of the source. - $v$: Speed of sound in the medium (constant, usually $340-343 \text{ m/s}$ in air). - $v_o$: Speed of the observer relative to the medium. - $v_s$: Speed of the source relative to the medium. #### 3. Sign Convention (Crucial!) The signs in the formula depend on the direction of motion relative to the line connecting the source and observer. - **Numerator ($v \pm v_o$):** Relates to the observer's motion. - Use `+` if the **observer is moving TOWARDS the source**. (This effectively increases the relative speed of sound reaching the observer, so frequency increases). - Use `-` if the **observer is moving AWAY from the source**. (Decreases relative speed, frequency decreases). - **Denominator ($v \mp v_s$):** Relates to the source's motion. - Use `-` if the **source is moving TOWARDS the observer**. (Compresses the waves, effectively shortening wavelength, so frequency increases). - Use `+` if the **source is moving AWAY from the observer**. (Stretches the waves, lengthening wavelength, so frequency decreases). - **General Rule of Thumb:** If the relative motion brings source and observer closer, the observed frequency increases. If they move further apart, the observed frequency decreases. #### 4. Special Cases with Examples - **Source moving towards observer, observer at rest ($v_o=0$):** $$f' = f \left( \frac{v}{v - v_s} \right)$$ **Example 7.1:** A train horn emits sound at $500 \text{ Hz}$ ($f$). It approaches a stationary observer ($v_o=0$) at $30 \text{ m/s}$ ($v_s$). Speed of sound $v=340 \text{ m/s}$. $f' = 500 \left( \frac{340}{340 - 30} \right) = 500 \left( \frac{340}{310} \right) \approx 548.4 \text{ Hz}$. (Higher pitch) - **Source moving away from observer, observer at rest ($v_o=0$):** $$f' = f \left( \frac{v}{v + v_s} \right)$$ **Example 7.2:** The train ($f=500 \text{ Hz}$, $v_s=30 \text{ m/s}$) moves away from the stationary observer. $f' = 500 \left( \frac{340}{340 + 30} \right) = 500 \left( \frac{340}{370} \right) \approx 459.5 \text{ Hz}$. (Lower pitch) - **Observer moving towards source, source at rest ($v_s=0$):** $$f' = f \left( \frac{v + v_o}{v} \right)$$ **Example 7.3:** A car ($v_o=20 \text{ m/s}$) drives towards a stationary siren ($f=800 \text{ Hz}$, $v_s=0$). $f' = 800 \left( \frac{340 + 20}{340} \right) = 800 \left( \frac{360}{340} \right) \approx 847.1 \text{ Hz}$. (Higher pitch) - **Observer moving away from source, source at rest ($v_s=0$):** $$f' = f \left( \frac{v - v_o}{v} \right)$$ **Example 7.4:** The car ($v_o=20 \text{ m/s}$) drives away from the stationary siren ($f=800 \text{ Hz}$, $v_s=0$). $f' = 800 \left( \frac{340 - 20}{340} \right) = 800 \left( \frac{320}{340} \right) \approx 752.9 \text{ Hz}$. (Lower pitch) - **Both moving towards each other:** $$f' = f \left( \frac{v + v_o}{v - v_s} \right)$$ **Example 7.5:** Train ($f=500 \text{ Hz}$, $v_s=30 \text{ m/s}$) approaches car ($v_o=20 \text{ m/s}$) approaching train. $f' = 500 \left( \frac{340 + 20}{340 - 30} \right) = 500 \left( \frac{360}{310} \right) \approx 580.6 \text{ Hz}$. #### 5. Doppler Effect in Light - For electromagnetic waves (like light), the concept of a medium is not relevant. The Doppler effect depends only on the relative velocity between the source and observer. - **Redshift:** If a light source is moving away from an observer, the observed wavelength increases (shifts towards the red end of the spectrum), and the frequency decreases. This is commonly observed in distant galaxies. - **Blueshift:** If a light source is moving towards an observer, the observed wavelength decreases (shifts towards the blue end of the spectrum), and the frequency increases. - **Formula (non-relativistic, for $v_{rel} \ll c$):** $$\frac{\Delta f}{f} \approx -\frac{v_{rel}}{c}$$ or $$\frac{\Delta \lambda}{\lambda} \approx \frac{v_{rel}}{c}$$ - $v_{rel}$: Relative speed of source and observer. - $c$: Speed of light ($3 \times 10^8 \text{ m/s}$). - Positive $v_{rel}$ means receding (redshift), negative $v_{rel}$ means approaching (blueshift). **Example 7.6 (Redshift):** A star emits light with a wavelength of $656 \text{ nm}$ (hydrogen-alpha line). If an observer measures it at $658 \text{ nm}$, what is the star's speed? $\Delta\lambda = 658 - 656 = 2 \text{ nm}$. $v_{rel} = c \frac{\Delta\lambda}{\lambda} = (3 \times 10^8 \text{ m/s}) \frac{2 \text{ nm}}{656 \text{ nm}} \approx 9.15 \times 10^5 \text{ m/s}$. Since $\Delta\lambda > 0$, the star is receding. ### Acoustics and Musical Instruments #### 1. Characteristics of Sound - **Loudness:** The subjective sensation of the intensity of sound. It depends primarily on the amplitude of the sound wave. Higher amplitude means greater loudness. (Units: Decibels, dB). - **Pitch:** The subjective sensation of the frequency of sound. Higher frequency means higher pitch (a sharper sound). Lower frequency means lower pitch (a flatter sound). - **Quality (Timbre):** The characteristic that distinguishes sounds of the same loudness and pitch produced by different instruments or voices. It depends on the number and relative intensities of the overtones (harmonics) present in the sound. A complex waveform with many harmonics sounds different from a pure sine wave. #### 2. Musical Scale and Harmonics - **Octave:** An interval between two musical notes where the higher note has exactly double the frequency of the lower note. For example, A4 ($440 \text{ Hz}$) and A5 ($880 \text{ Hz}$) are an octave apart. - **Harmonics:** Frequencies that are integer multiples of the fundamental frequency ($f_1$). So, $f_n = n f_1$. - The fundamental frequency is the first harmonic. - $2f_1$ is the second harmonic, $3f_1$ is the third harmonic, and so on. - **Overtones:** Any frequency higher than the fundamental frequency. - The first overtone is the second harmonic ($2f_1$). - The second overtone is the third harmonic ($3f_1$). - In general, the $n^{th}$ overtone is the $(n+1)^{th}$ harmonic. #### 3. Reverberation - **Definition:** Reverberation is the persistence of sound in an enclosed space (like a room or hall) after the original sound source has stopped. It is caused by multiple reflections of sound waves from the walls, ceiling, and other surfaces, which decay over time as the sound energy is absorbed. - **Reverberation Time ($T_R$):** The time required for the intensity of sound in a room to decay by a factor of one million (or for its sound level to decrease by $60 \text{ dB}$) after the sound source has been stopped. - **Sabine's Formula:** An empirical formula used to estimate the reverberation time for a room. $$T_R = 0.161 \frac{V}{\sum a_i S_i} = 0.161 \frac{V}{S_e}$$ - $V$: Volume of the hall or room (in cubic meters, m³). - $S_e = \sum a_i S_i$: Total effective absorption area (in metric sabins or m² Sabine). - $a_i$: Absorption coefficient of the $i^{th}$ surface (dimensionless, ranges from $0$ for perfect reflection to $1$ for perfect absorption). - $S_i$: Area of the $i^{th}$ surface (in m²). - An optimal reverberation time is crucial for good acoustics in concert halls, classrooms, etc. Too long a reverberation time leads to muddy sound, too short makes the room sound "dead". **Example 8.1 (Reverberation Time):** A classroom has a volume of $300 \text{ m}^3$. The total surface area is $400 \text{ m}^2$, and the average absorption coefficient of the materials is $0.2$. $S_e = 400 \text{ m}^2 \times 0.2 = 80 \text{ m}^2 \text{ Sabine}$. $T_R = 0.161 \times (300 / 80) = 0.161 \times 3.75 \approx 0.60 \text{ seconds}$. This would be a reasonably good reverberation time for a classroom.