Electrical Machines
Cheatsheet Content
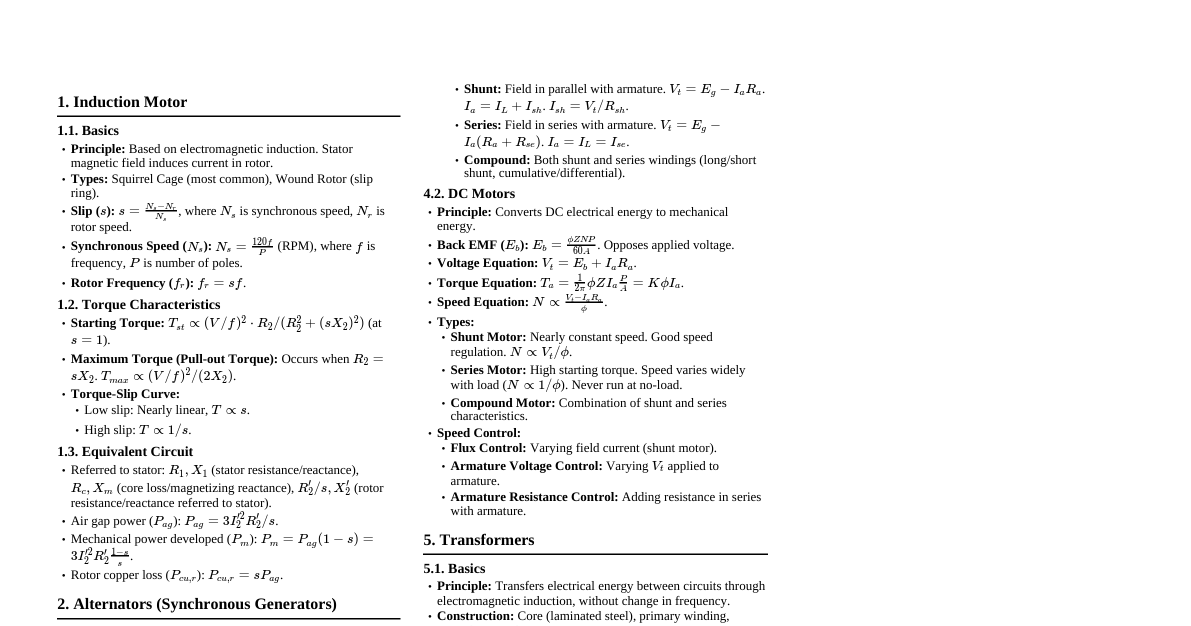
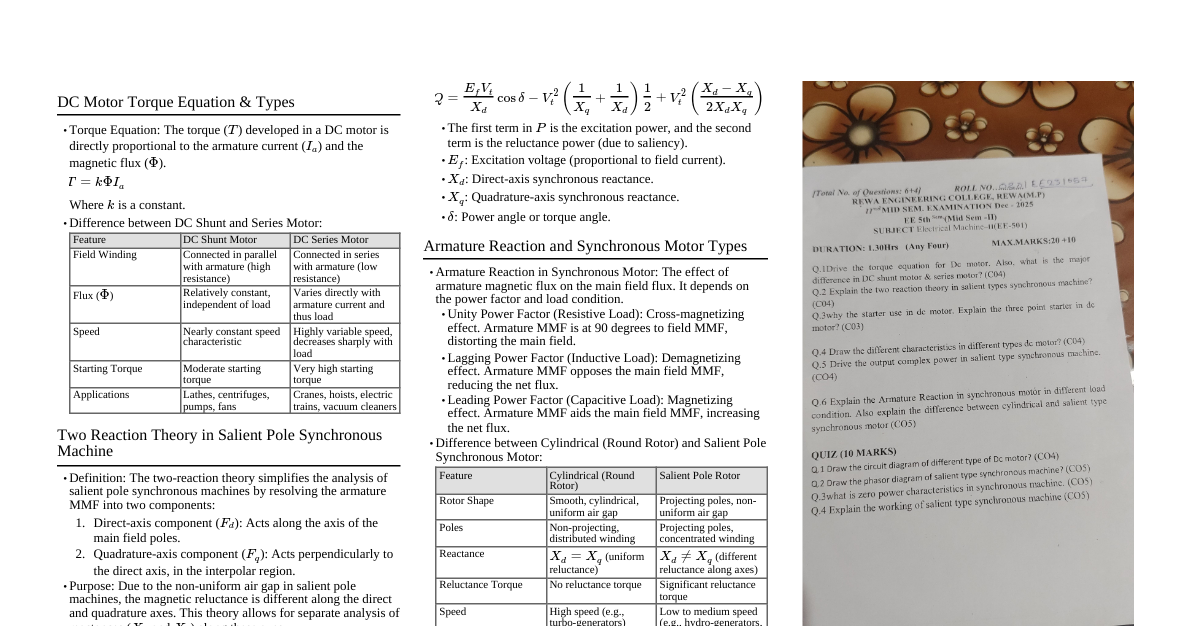
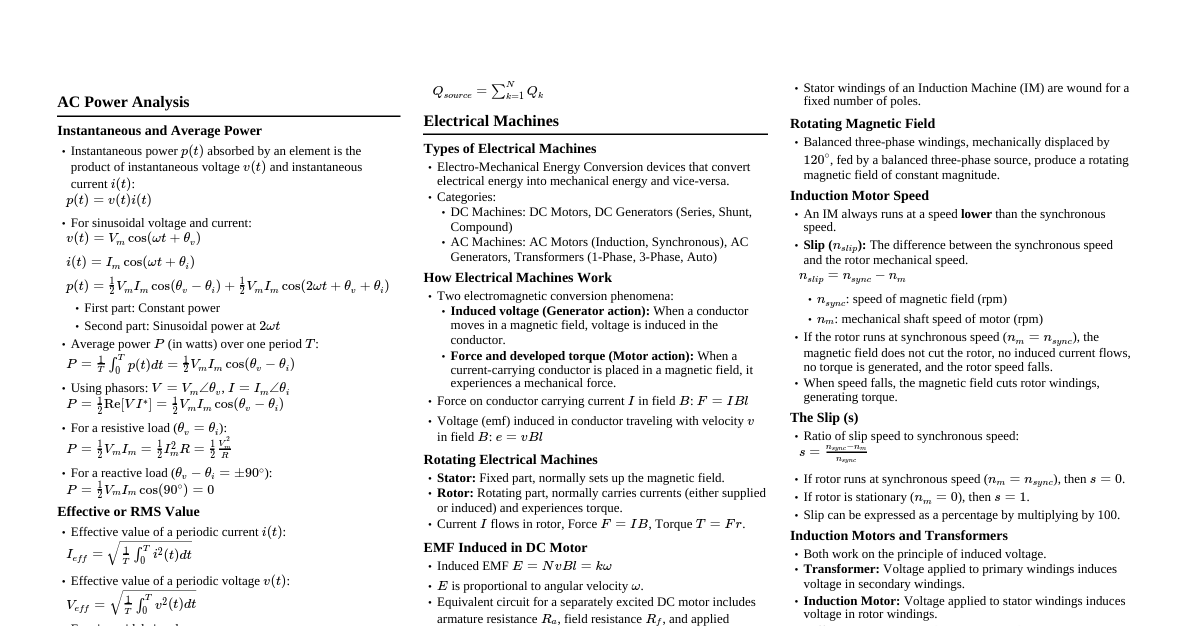
### DC Machines - **Construction:** Stator (field winding), Rotor (armature winding, commutator, brushes) - **Principle:** Converts electrical energy to mechanical (motor) or mechanical to electrical (generator) using electromagnetic induction. - **EMF Equation (Generator):** $E_g = \frac{\phi Z N P}{60 A}$ (where $\phi$ is flux/pole, $Z$ is total conductors, $N$ is speed in RPM, $P$ is poles, $A$ is parallel paths) - **Torque Equation (Motor):** $T = \frac{1}{2\pi} \phi Z I_a \frac{P}{A}$ (where $I_a$ is armature current) - **Types:** - **Shunt:** Field winding in parallel with armature. - **Series:** Field winding in series with armature. - **Compound:** Both shunt and series windings. ### Synchronous Machines - **Construction:** Stator (armature winding), Rotor (field winding, salient or cylindrical pole) - **Principle:** Operates at synchronous speed, $N_s = \frac{120f}{P}$ (where $f$ is frequency, $P$ is poles). - **EMF Equation:** $E = 4.44 K_c K_d f \phi T_{ph}$ (where $K_c$ is coil span factor, $K_d$ is distribution factor, $T_{ph}$ is turns per phase) - **Voltage Regulation:** $VR = \frac{E_0 - V_t}{V_t} \times 100\%$ (where $E_0$ is no-load EMF, $V_t$ is terminal voltage) - **Power Angle Equation:** $P = \frac{E_f V_t}{X_s} \sin\delta$ (where $E_f$ is excitation voltage, $X_s$ is synchronous reactance, $\delta$ is power angle) - **Operating Modes:** Generator (leading/lagging PF), Motor (leading/lagging PF) ### Induction Machines - **Construction:** Stator (3-phase winding), Rotor (squirrel cage or wound type) - **Principle:** Rotor current induced by stator rotating magnetic field. - **Synchronous Speed:** $N_s = \frac{120f}{P}$ - **Slip:** $s = \frac{N_s - N_r}{N_s}$ (where $N_r$ is rotor speed) - **Rotor Frequency:** $f_r = s f$ - **Rotor EMF:** $E_{2r} = s E_2$ - **Torque Equation (approximate):** $T \propto \frac{s E_2^2 R_2}{R_2^2 + (s X_2)^2}$ - **Power Flow:** Air Gap Power ($P_{ag}$) $\rightarrow$ Rotor Copper Loss ($s P_{ag}$) $\rightarrow$ Mechanical Power Developed ($P_{md} = (1-s) P_{ag}$) ### Transformers - **Principle:** Transfers electrical energy between circuits through electromagnetic induction, without change in frequency. - **EMF Equation:** $E = 4.44 f \phi_m N$ (where $\phi_m$ is maximum flux, $N$ is turns) - **Turns Ratio:** $\frac{V_1}{V_2} = \frac{N_1}{N_2} = \frac{I_2}{I_1} = a$ - **Equivalent Circuit:** Referred to primary or secondary side. - **Voltage Regulation:** $VR = \frac{V_{2,NL} - V_{2,FL}}{V_{2,FL}} \times 100\%$ - **Efficiency:** $\eta = \frac{Output Power}{Input Power} = \frac{Output Power}{Output Power + Core Loss + Copper Loss}$ - **Maximum Efficiency:** Occurs when Core Loss = Copper Loss. ### Special Machines - **Stepper Motors:** Discrete angular movements, open-loop control. - **Servo Motors:** High accuracy, closed-loop control, fast response. - **Universal Motors:** Can operate on both AC and DC supply. - **Brushless DC (BLDC) Motors:** No brushes, electronic commutation, high efficiency.