Rotational Dynamics (JEE)
Cheatsheet Content
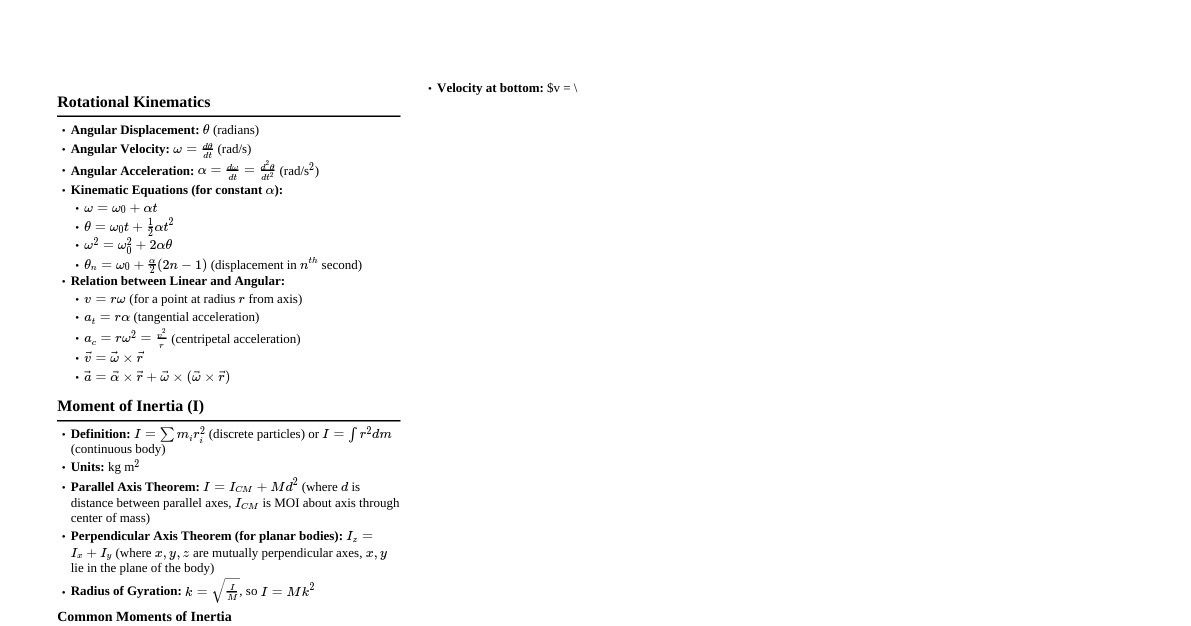
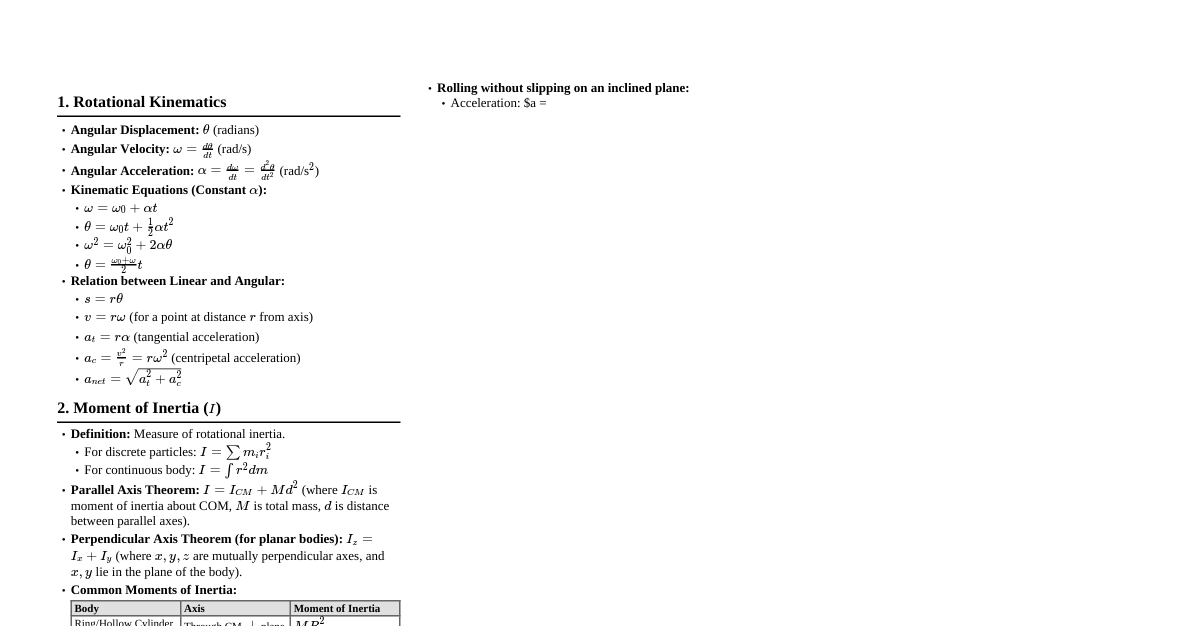
### Rotational Kinematics Analogy | Linear | Rotational | |---|---| | $x$ (displacement) | $\theta$ (angular displacement) | | $v = dx/dt$ (velocity) | $\omega = d\theta/dt$ (angular velocity) | | $a = dv/dt$ (acceleration) | $\alpha = d\omega/dt$ (angular acceleration) | | $v = u + at$ | $\omega = \omega_0 + \alpha t$ | | $s = ut + \frac{1}{2}at^2$ | $\theta = \omega_0 t + \frac{1}{2}\alpha t^2$ | | $v^2 = u^2 + 2as$ | $\omega^2 = \omega_0^2 + 2\alpha\theta$ | ### Moment of Inertia (I) - **Definition:** Measure of an object's resistance to angular acceleration. - **For a point mass:** $I = mr^2$ - **For a system of particles:** $I = \sum_i m_i r_i^2$ - **For a rigid body:** $I = \int r^2 dm$ - **Parallel Axis Theorem:** $I = I_{CM} + Md^2$ (where $I_{CM}$ is moment of inertia about center of mass, $M$ is total mass, $d$ is distance between axes). - **Perpendicular Axis Theorem (for planar bodies):** $I_z = I_x + I_y$ (where $x, y$ are in the plane and $z$ is perpendicular). ### Torque ($\vec{\tau}$) - **Definition:** Rotational analogue of force. Causes angular acceleration. - **Formula:** $\vec{\tau} = \vec{r} \times \vec{F}$ (where $\vec{r}$ is position vector from pivot to point of force application, $\vec{F}$ is force vector). - **Magnitude:** $\tau = rF\sin\theta = r_{\perp}F = rF_{\perp}$ - **Relation to angular acceleration:** $\vec{\tau}_{net} = I\vec{\alpha}$ ### Angular Momentum ($\vec{L}$) - **Definition:** Rotational analogue of linear momentum. - **For a particle:** $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times (m\vec{v})$ - **For a rigid body:** $\vec{L} = I\vec{\omega}$ - **Relation to torque:** $\vec{\tau}_{net} = \frac{d\vec{L}}{dt}$ - **Conservation of Angular Momentum:** If $\vec{\tau}_{net} = 0$, then $\vec{L}_{initial} = \vec{L}_{final}$ (or $I_1\omega_1 = I_2\omega_2$). ### Rotational Kinetic Energy ($K_R$) - **Formula:** $K_R = \frac{1}{2}I\omega^2$ - **Total Kinetic Energy (rolling body):** $K_{total} = K_T + K_R = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ ### Rolling Motion - **Pure Rolling Condition:** $v_{CM} = R\omega$ (for a wheel of radius $R$). - **Acceleration in Pure Rolling:** $a_{CM} = R\alpha$. - **Down an inclined plane:** - Acceleration: $a_{CM} = \frac{g\sin\theta}{1 + I_{CM}/(MR^2)}$ - Final velocity: $v = \sqrt{\frac{2gh}{1 + I_{CM}/(MR^2)}}$ ### Common Moments of Inertia | Shape | Axis | Moment of Inertia | |---|---|---| | Ring / Hollow Cylinder (mass $M$, radius $R$) | Through center, perp. to plane | $MR^2$ | | Disc / Solid Cylinder (mass $M$, radius $R$) | Through center, perp. to plane | $\frac{1}{2}MR^2$ | | Solid Sphere (mass $M$, radius $R$) | Through center | $\frac{2}{5}MR^2$ | | Hollow Sphere (mass $M$, radius $R$) | Through center | $\frac{2}{3}MR^2$ | | Rod (mass $M$, length $L$) | Through center, perp. to length | $\frac{1}{12}ML^2$ | | Rod (mass $M$, length $L$) | Through end, perp. to length | $\frac{1}{3}ML^2$ |