Transformer Essentials
Cheatsheet Content
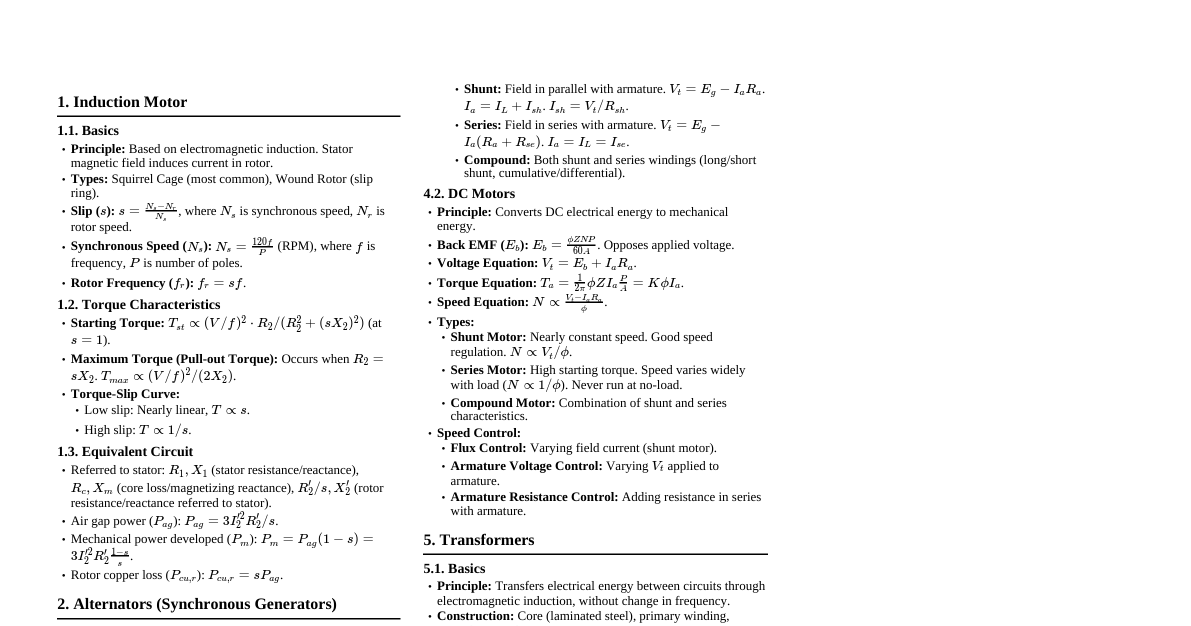
Transformer Definition A transformer is a static electric device that transfers electrical energy from one circuit to another circuit at the same frequency but with changed voltage (or current or both) through a magnetic circuit. Principle of Operation When alternating voltage $V_1$ is applied to the primary winding, an exciting current $I_0$ flows through it. This current produces an alternating flux ($\phi$) in the core, linking both primary and secondary windings. According to Faraday's laws, self-induced emf $E_1$ in the primary and mutually induced emf $E_2$ in the secondary are produced. By Lenz's Law, $E_1$ opposes the applied voltage $V_1$ and is approximately equal in magnitude to $V_1$. When a load is connected to the secondary, current flows, and voltage $V_2$ is induced. EMF Equation For a sinusoidal applied voltage, the core flux is given by $\phi = \phi_{max} \sin(\omega t)$. Instantaneous induced emf $e$ in a coil with $N$ turns: $e = -N \frac{d\phi}{dt} = -N \frac{d}{dt}(\phi_{max} \sin(\omega t)) = -N \omega \phi_{max} \cos(\omega t)$ The maximum value of induced emf $E_{max}$ occurs when $\cos(\omega t) = 1$: $E_{max} = N \omega \phi_{max} = 2\pi f N \phi_{max}$ RMS value of induced emf $E_{rms}$: $E_{rms} = \frac{E_{max}}{\sqrt{2}} = \frac{2\pi f N \phi_{max}}{\sqrt{2}} = 4.44 f N \phi_{max}$ Primary RMS induced voltage: $E_1 = 4.44 f N_1 \phi_{max}$ Secondary RMS induced voltage: $E_2 = 4.44 f N_2 \phi_{max}$ Transformation Ratio (Turns Ratio) The ratio of primary voltage to secondary voltage is equal to the ratio of primary winding turns to secondary winding turns: $\frac{E_1}{E_2} = \frac{N_1}{N_2} = K$ (Transformation Ratio) Step-down transformer: If $N_1 > N_2$, then $E_2 1$). Step-up transformer: If $N_2 > N_1$, then $E_2 > E_1$ ($K For an ideal transformer (neglecting losses), the power in primary and secondary is equal: $E_1 I_1 = E_2 I_2 \implies \frac{I_1}{I_2} = \frac{E_2}{E_1} = \frac{N_2}{N_1} = \frac{1}{K}$ Current is transformed in the reverse ratio of voltage. If voltage is stepped up, current is stepped down, and vice-versa. Construction of Single-Phase Transformers Consists of primary and secondary windings on a magnetic core (thin silicon steel laminations to reduce eddy current and hysteresis losses). Two general types: Core Type: Windings surround a considerable part of the steel core. Core has two vertical limbs and horizontal yokes. Low voltage winding placed adjacent to core, high voltage outside to minimize insulation. Flux has a single path around the legs. Concentric coils are used. Preferred for low voltage transformers. Shell Type: Steel core surrounds a major part of the winding. Low and high voltage windings are wound over the central limb and are interleaved (sandwiched). Requires more conductor material. Flux in the central limb divides equally and returns through the outer two legs. Interleaved coils are used. Preferred for high voltage transformers. No Load Operation of a Transformer Primary winding connected to AC supply, secondary is open. Instantaneous flux: $\phi = \phi_m \sin(\omega t)$ Induced emf in primary: $E_1 = -N_1 \frac{d\phi}{dt} = -N_1 \omega \phi_m \cos(\omega t) = N_1 \omega \phi_m \sin(\omega t - \frac{\pi}{2})$ Induced emf in secondary: $E_2 = -N_2 \frac{d\phi}{dt} = N_2 \omega \phi_m \sin(\omega t - \frac{\pi}{2})$ The induced emfs $E_1$ and $E_2$ lag the main flux $\phi$ by $\frac{\pi}{2}$. $E_1$ and $E_2$ are in phase with each other. The applied voltage $V_1$ leads the main flux $\phi$ by $\frac{\pi}{2}$. $V_1$ is in phase opposition to $E_1$ and $E_2$. Practical Transformer on No Load The no-load current $I_0$ lags the applied voltage $V_1$ by an angle $\phi_0$. $I_0$ has two components: Magnetizing component ($I_m$): In phase with flux $\phi$. It is purely reactive and responsible for producing the flux. $I_m = I_0 \sin \phi_0$. Core loss component ($I_w$): In phase with $V_1$. Supplies hysteresis and eddy current losses in the core. $I_w = I_0 \cos \phi_0$. Magnitude of no-load current: $I_0 = \sqrt{I_m^2 + I_w^2}$ No-load power factor angle: $\phi_0 = \arctan(\frac{I_m}{I_w})$ (typically close to $90^\circ$) Total power input on no load ($W_0$): $W_0 = V_1 I_0 \cos \phi_0 = V_1 I_w = P_i$ (Iron losses) Transformer on Load When loaded, secondary current $I_2$ flows. Its magnitude and phase depend on the load type (resistive, inductive, capacitive). Secondary MMF $N_2 I_2$ produces flux $\phi_2$ which opposes the main flux $\phi$. The primary draws additional current $I_2'$ (load component of primary current) which produces flux $\phi_2'$ to neutralize $\phi_2$. The net flux in the core remains practically constant from no-load to full-load. Ampere-turns balance: $N_2 I_2 = N_1 I_2'$ (approximately) Thus, $I_2' = \frac{N_2}{N_1} I_2 = \frac{1}{K} I_2$ Primary current $I_1$ is the vector sum of no-load current $I_0$ and load component $I_2'$: $I_1 = \vec{I_0} + \vec{I_2'}$ Effect of Winding Resistances Primary winding resistance $R_1$, secondary winding resistance $R_2$. Voltage drop in primary: $I_1 R_1$. Primary induced emf $E_1 = V_1 - I_1 R_1$. Voltage drop in secondary: $I_2 R_2$. Terminal voltage $V_2 = E_2 - I_2 R_2$. Equivalent Resistance To simplify calculations, resistances can be referred to either primary or secondary side. Secondary resistance referred to primary ($R_2'$): $R_2' = \frac{R_2}{K^2}$ Total equivalent resistance referred to primary ($R_{1e}$): $R_{1e} = R_1 + R_2' = R_1 + \frac{R_2}{K^2}$ Primary resistance referred to secondary ($R_1'$): $R_1' = K^2 R_1$ Total equivalent resistance referred to secondary ($R_{2e}$): $R_{2e} = R_2 + R_1' = R_2 + K^2 R_1$ Effect of Leakage Reactances Not all flux links both windings. Leakage flux is produced, linking only one winding. Primary leakage flux ($\phi_{L1}$): Produced by $I_1$, links primary only. Secondary leakage flux ($\phi_{L2}$): Produced by $I_2$, links secondary only. These leakage fluxes cause self-induced emfs (voltage drops) across fictitious reactances. Primary leakage reactance ($X_1$): Voltage drop $I_1 X_1$. Secondary leakage reactance ($X_2$): Voltage drop $I_2 X_2$. Equivalent Leakage Reactance Secondary reactance referred to primary ($X_2'$): $X_2' = \frac{X_2}{K^2}$ Total equivalent reactance referred to primary ($X_{1e}$): $X_{1e} = X_1 + X_2' = X_1 + \frac{X_2}{K^2}$ Primary reactance referred to secondary ($X_1'$): $X_1' = K^2 X_1$ Total equivalent reactance referred to secondary ($X_{2e}$): $X_{2e} = X_2 + X_1' = X_2 + K^2 X_1$ Equivalent Impedance The total impedance of primary winding: $Z_1 = R_1 + jX_1$ The total impedance of secondary winding: $Z_2 = R_2 + jX_2$ Equivalent Impedance Referred to Primary/Secondary Total equivalent impedance referred to primary ($Z_{1e}$): $Z_{1e} = R_{1e} + jX_{1e}$ Magnitude: $|Z_{1e}| = \sqrt{R_{1e}^2 + X_{1e}^2}$ Total equivalent impedance referred to secondary ($Z_{2e}$): $Z_{2e} = R_{2e} + jX_{2e}$ Magnitude: $|Z_{2e}| = \sqrt{R_{2e}^2 + X_{2e}^2}$ Losses in a Transformer Two main types of losses: 1. Core or Iron Losses ($P_i$) Due to alternating flux in the magnetic core. Constant for all loads. Hysteresis Loss ($P_h$): Due to magnetization and demagnetization cycle. $P_h = K_h B_m^{1.5 \text{ to } 2.5} f V$ (watts) ($K_h$: hysteresis constant, $B_m$: maximum flux density, $f$: frequency, $V$: volume of core) Eddy Current Loss ($P_e$): Due to induced emfs setting up circulating currents in the core. $P_e = K_e B_m^2 f^2 t^2 V$ (watts) ($K_e$: eddy current constant, $t$: thickness of laminations) Total iron losses: $P_i = P_h + P_e$ 2. Copper Losses ($P_{cu}$) Due to $I^2 R$ losses in primary and secondary windings. Variable, depends on load current. Total copper loss: $P_{cu} = I_1^2 R_1 + I_2^2 R_2$ Expressed in terms of equivalent resistance: $P_{cu} = I_1^2 R_{1e} = I_2^2 R_{2e}$ Copper losses are proportional to the square of the kVA rating. Efficiency of a Transformer ($\eta$) Ratio of output power to input power. $\eta = \frac{\text{Output Power}}{\text{Input Power}} = \frac{\text{Output Power}}{\text{Output Power} + \text{Losses}}$ $\eta = \frac{V_2 I_2 \cos \phi}{V_2 I_2 \cos \phi + P_i + P_{cu}}$ For fractional load 'n' (where $n = \frac{\text{Actual Load}}{\text{Full Load}}$): $\eta = \frac{n (\text{VA rating}) \cos \phi}{n (\text{VA rating}) \cos \phi + P_i + n^2 (P_{cu})_{FL}} \times 100\%$ Condition for Maximum Efficiency Maximum efficiency occurs when copper losses equal iron losses ($P_{cu} = P_i$). Load current for maximum efficiency ($I_{2m}$): $I_{2m} = I_{2(FL)} \sqrt{\frac{P_i}{(P_{cu})_{FL}}}$ kVA supplied at maximum efficiency: $\text{kVA}_{max} = \text{kVA}_{FL} \sqrt{\frac{P_i}{(P_{cu})_{FL}}}$ Maximum efficiency ($\eta_{max}$): $\eta_{max} = \frac{n (\text{VA rating}) \cos \phi}{n (\text{VA rating}) \cos \phi + 2 P_i} \times 100\%$ Voltage Regulation of Transformer The change in secondary terminal voltage from no-load to full-load, with primary voltage constant, expressed as a percentage of full-load terminal voltage. $\% \text{ Voltage Regulation} = \frac{E_2 - V_2}{V_2} \times 100\%$ Where $E_2$ is no-load secondary voltage and $V_2$ is full-load secondary voltage. Expression for voltage regulation: $\% \text{ Regulation} = \frac{I_2 (R_{2e} \cos \phi \pm X_{2e} \sin \phi)}{V_2} \times 100\%$ '+' sign for lagging power factors. '-' sign for leading power factors. Alternatively, referred to primary side: $\% \text{ Regulation} = \frac{I_1 (R_{1e} \cos \phi \pm X_{1e} \sin \phi)}{V_1} \times 100\%$ Voltage regulation depends on magnitude of load current and power factor of the load. For lagging PF: $V_2 For leading PF: $V_2 > E_2$, negative regulation (can occur if $X_{2e}$ is large and $\sin \phi$ is large negative). Single-Phase Auto Transformer A transformer with a single winding, where a part of the winding is common to both high and low voltage sides. Advantages: Less winding material (saving in copper). Smaller size and cheaper. Higher efficiency (lower core and ohmic losses). Better voltage regulation. Variable output voltage (with sliding contact). Disadvantages: Direct connection between high and low voltage sides (safety hazard if common winding opens). Larger short-circuit current due to reduced internal impedance. Applications: Continuously variable AC voltage. Interconnections of power systems with different voltage levels. Boosting AC mains voltage slightly. Starting induction motors and synchronous motors. Voltampere transferred: Conductively: $V_2 I_1$ Inductively: $V_2 (I_2 - I_1)$ Three Phase Transformer Used for three-phase power systems. Can be a single three-phase unit or three single-phase units. Advantages of a single three-phase transformer: Smaller space. Lighter and cheaper. More efficient. Construction: Three-limbed core, one limb per phase winding. LV winding placed over core, HV winding outside. Connections: Primary and secondary windings can be connected in Star (Y) or Delta ($\Delta$). Four main combinations: Star-Star (Y-Y): Phase current = Line current ($I_p = I_L$). Line voltage = $\sqrt{3} \times$ Phase voltage ($V_L = \sqrt{3} V_p$). Delta-Delta ($\Delta$-$\Delta$): Line voltage = Phase voltage ($V_L = V_p$). Line current = $\sqrt{3} \times$ Phase current ($I_L = \sqrt{3} I_p$). Star-Delta (Y-$\Delta$): Primary Y-connected, secondary $\Delta$-connected. Often used for step-down at receiving substations. Delta-Star ($\Delta$-Y): Primary $\Delta$-connected, secondary Y-connected. Often used at power stations to step-up voltage for transmission. Measuring Instruments Classification based on principle: 1. Absolute Instruments Measure quantity in terms of instrument constants and deflection. Example: Tangent galvanometer. 2. Secondary Instruments Calibrated using absolute instruments, directly show magnitude. Indicating: Show instantaneous value (e.g., ammeter, voltmeter). Recording: Provide continuous record over time. Integrating: Measure total quantity of electricity over time (e.g., energy meter). Classification based on measured quantity: DC: Measure only DC quantities. AC: Measure only AC quantities. AC/DC: Measure both AC and DC quantities. Types of Torques in Measuring Instruments Deflecting Torque ($T_d$): Moves pointer from zero position. Example: Electromagnetic effect, thermal effect. Controlling Torque ($T_c$): Opposes deflecting torque. Ensures correct measurement and returns pointer to zero. Provided by: Spring Control: Phosphor bronze spiral springs. $T_c \propto \theta$. Gravity Control: Small weight attached to moving system. $T_c \propto \sin \theta$. Damping Torque: Prevents oscillations of pointer, bringing it to rest quickly. Provided by: Air-friction damping: Piston moving in a fixed air chamber. Fluid-friction damping: Vanes moving in damping oil. Eddy-current damping: Eddy currents induced in a conducting non-magnetic material moving in a magnetic field. Moving Iron Instruments Attraction Type: Principle: A piece of soft iron is attracted into a magnetic field created by a coil. Scale: Cramped at lower end, expanded at upper end (non-uniform). Repulsion Type: Principle: Two pieces of soft iron (one fixed, one moving) are magnetized by the same field, repel each other. Scale: Non-uniform. Can measure both AC and DC quantities (deflecting torque depends on $I^2$). Moving Coil Instruments (PMMC) Principle: Current-carrying conductor in a magnetic field experiences a force. Operation: Current in a coil produces a deflecting torque. Control: Spring control. Damping: Eddy-current damping. Scale: Uniform (since $T_d \propto I$). Measures only DC quantities reliably. For AC, pointer quivers around zero. Dynamometer-type Wattmeter Measures electrical power. Combination of ammeter (fixed current coil) and voltmeter (moving pressure coil). Current Coil: Fixed, carries load current. Pressure Coil: Moving, connected in parallel with supply, carries current proportional to voltage. Operation: Deflecting torque results from interaction of magnetic fields created by current and pressure coils. Scale: Non-uniform. Extension of Range Ammeter Shunt: Low resistance connected in parallel with the ammeter coil. Most of the current bypasses the coil through the shunt. Shunt resistance: $R_{sh} = \frac{R_m}{m-1}$, where $m = \frac{I}{I_m}$ (multiplying factor), $R_m$ is meter resistance, $I$ is total current, $I_m$ is full-scale deflection current. Voltmeter Multiplier: High non-inductive resistance (multiplier) connected in series with the voltmeter coil. Extends the voltage range. Multiplier resistance: $R = \frac{V}{I_m} - R_v$, where $V$ is desired voltage range, $I_m$ is full-scale deflection current, $R_v$ is voltmeter resistance.