Integration and Dynamics
Cheatsheet Content
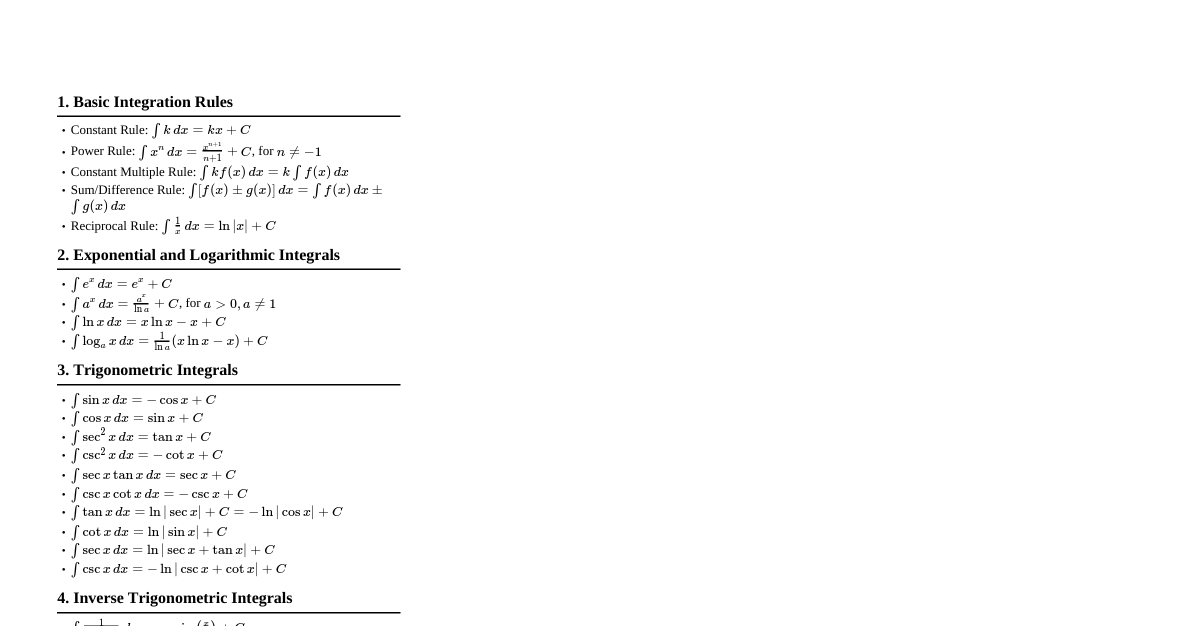
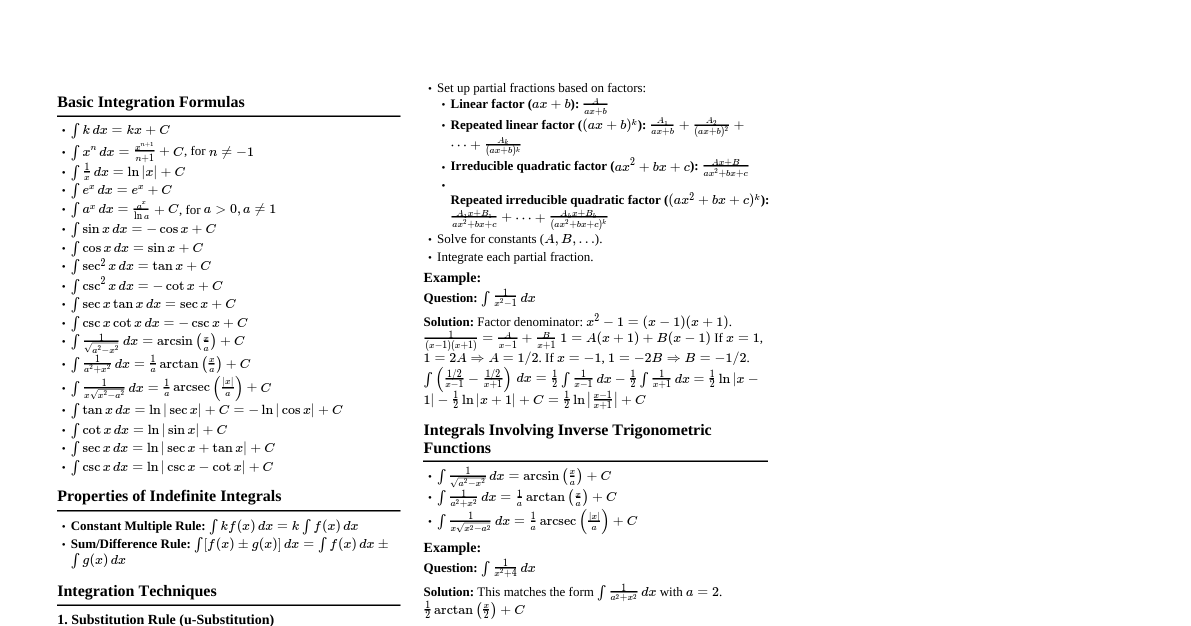
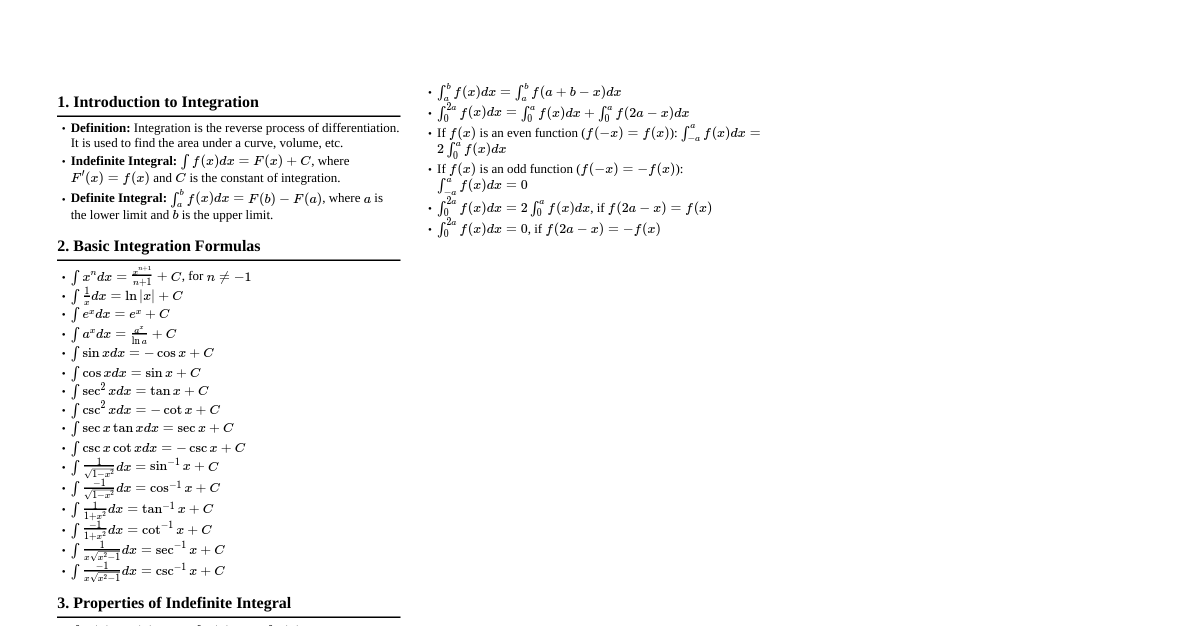
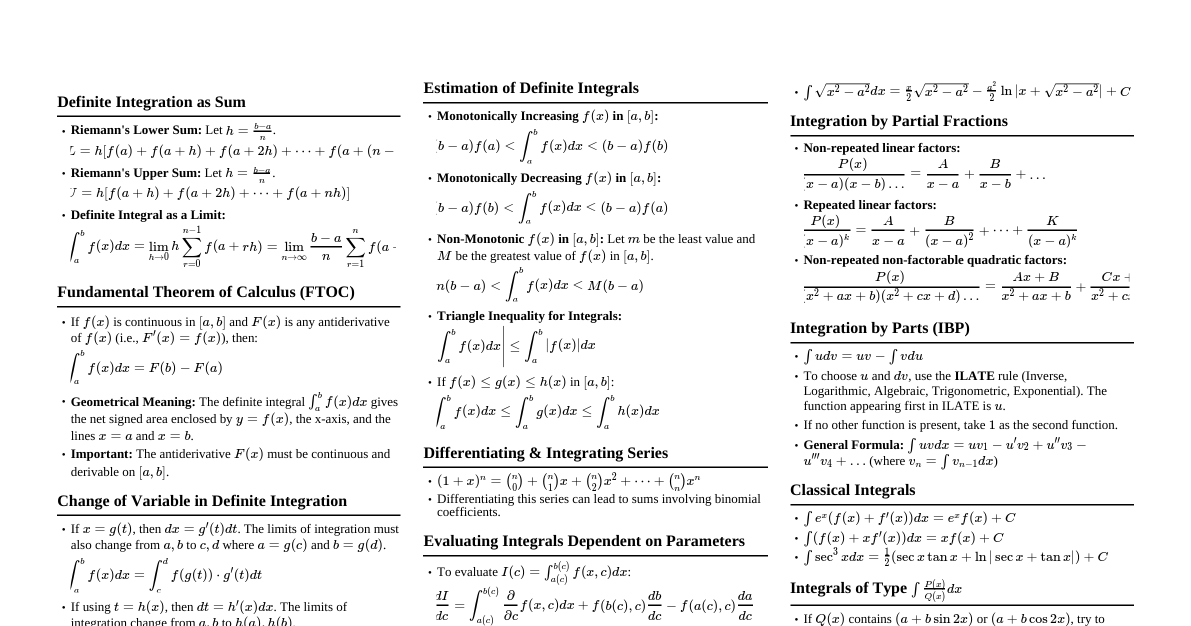
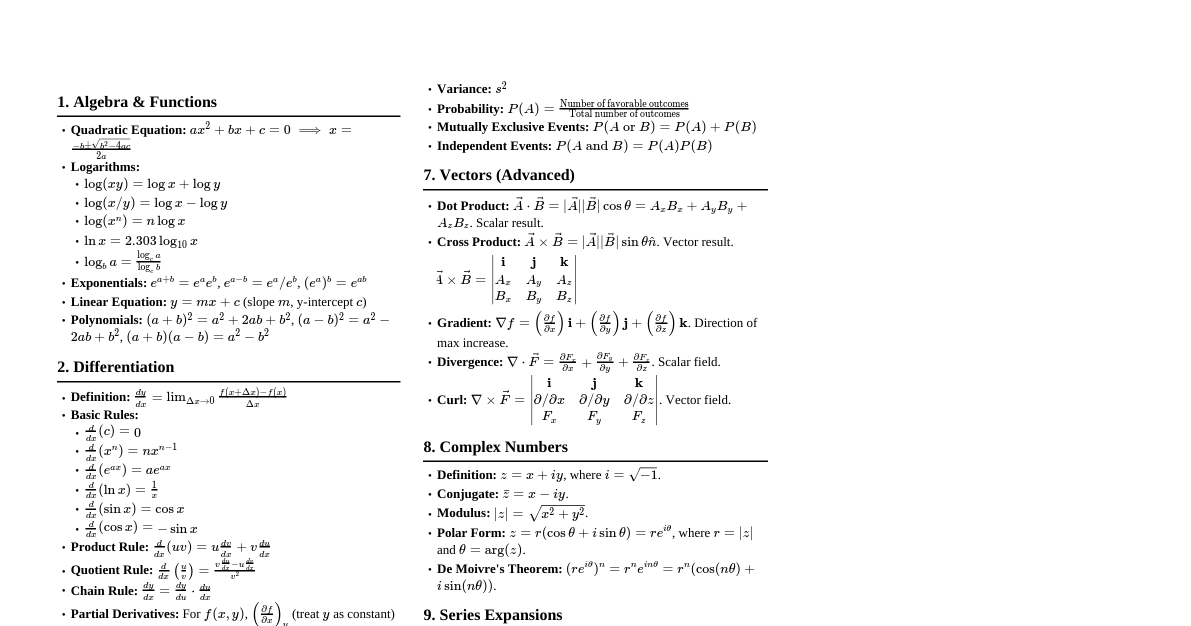
1. Indefinite Integrals (Antiderivatives) Definition: If $F'(x) = f(x)$, then $\int f(x) dx = F(x) + C$, where $C$ is the constant of integration. Power Rule: $\int x^n dx = \frac{x^{n+1}}{n+1} + C$ for $n \neq -1$ Logarithmic Rule: $\int \frac{1}{x} dx = \ln|x| + C$ Exponential Rule: $\int e^x dx = e^x + C$ Trigonometric Rules: $\int \cos x dx = \sin x + C$ $\int \sin x dx = -\cos x + C$ $\int \sec^2 x dx = \tan x + C$ $\int \csc^2 x dx = -\cot x + C$ $\int \sec x \tan x dx = \sec x + C$ $\int \csc x \cot x dx = -\csc x + C$ Inverse Trigonometric Rules: $\int \frac{1}{\sqrt{a^2 - x^2}} dx = \arcsin\left(\frac{x}{a}\right) + C$ $\int \frac{1}{a^2 + x^2} dx = \frac{1}{a}\arctan\left(\frac{x}{a}\right) + C$ 2. Techniques of Integration 2.1. Substitution (u-Substitution) Used when the integrand contains a function and its derivative. Let $u = g(x)$, then $du = g'(x) dx$. Example: $\int 2x(x^2+1)^3 dx$. Let $u = x^2+1$, $du = 2x dx$. Then $\int u^3 du = \frac{u^4}{4} + C = \frac{(x^2+1)^4}{4} + C$. 2.2. Integration by Parts Formula: $\int u \, dv = uv - \int v \, du$ Choose $u$ using LIATE (Logarithmic, Inverse trig, Algebraic, Trigonometric, Exponential) for the order of $u$ selection. Example: $\int x e^x dx$. Let $u=x$, $dv=e^x dx$. Then $du=dx$, $v=e^x$. $$ \int x e^x dx = x e^x - \int e^x dx = x e^x - e^x + C $$ 2.3. Trigonometric Integrals Involving $\sin^m x \cos^n x$: If $n$ is odd, save one $\cos x$, convert remaining $\cos^2 x$ to $1-\sin^2 x$, let $u=\sin x$. If $m$ is odd, save one $\sin x$, convert remaining $\sin^2 x$ to $1-\cos^2 x$, let $u=\cos x$. If $m, n$ are both even, use half-angle identities: $\sin^2 x = \frac{1-\cos(2x)}{2}$, $\cos^2 x = \frac{1+\cos(2x)}{2}$. Involving $\tan^m x \sec^n x$: If $n$ is even ($n \ge 2$), save $\sec^2 x$, convert remaining $\sec^2 x$ to $1+\tan^2 x$, let $u=\tan x$. If $m$ is odd ($m \ge 1$), save $\tan x \sec x$, convert remaining $\tan^2 x$ to $\sec^2 x - 1$, let $u=\sec x$. 2.4. Trigonometric Substitution For integrands involving $\sqrt{a^2 - x^2}$, let $x = a \sin\theta$. For integrands involving $\sqrt{a^2 + x^2}$, let $x = a \tan\theta$. For integrands involving $\sqrt{x^2 - a^2}$, let $x = a \sec\theta$. 2.5. Partial Fraction Decomposition Used for rational functions $\frac{P(x)}{Q(x)}$ where degree($P$) < degree($Q$). Factor $Q(x)$ into linear and irreducible quadratic factors. Example: $\frac{1}{x^2-1} = \frac{1}{(x-1)(x+1)} = \frac{A}{x-1} + \frac{B}{x+1}$. 3. Definite Integrals Fundamental Theorem of Calculus (Part 2): $\int_a^b f(x) dx = F(b) - F(a)$, where $F$ is any antiderivative of $f$. Properties: $\int_a^b k f(x) dx = k \int_a^b f(x) dx$ $\int_a^b [f(x) \pm g(x)] dx = \int_a^b f(x) dx \pm \int_a^b g(x) dx$ $\int_a^b f(x) dx = -\int_b^a f(x) dx$ $\int_a^a f(x) dx = 0$ $\int_a^c f(x) dx + \int_c^b f(x) dx = \int_a^b f(x) dx$ Average Value of a Function: $f_{avg} = \frac{1}{b-a} \int_a^b f(x) dx$. 4. Applications of Integration Area between curves: $A = \int_a^b |f(x) - g(x)| dx$. Volume of Solids of Revolution: Disk Method: $V = \pi \int_a^b [R(x)]^2 dx$ (revolved around x-axis) Washer Method: $V = \pi \int_a^b ([R(x)]^2 - [r(x)]^2) dx$ Shell Method: $V = 2\pi \int_a^b x f(x) dx$ (revolved around y-axis) Arc Length: $L = \int_a^b \sqrt{1 + [f'(x)]^2} dx$. Work: $W = \int_a^b F(x) dx$. Center of Mass: $M_x = \int_a^b \frac{1}{2} [f(x)]^2 dx$, $M_y = \int_a^b x f(x) dx$ $(\bar{x}, \bar{y}) = \left(\frac{M_y}{A}, \frac{M_x}{A}\right)$ where $A = \int_a^b f(x) dx$. 5. Improper Integrals Integrals with infinite limits or discontinuous integrands. Type 1 (Infinite Limits): $\int_a^\infty f(x) dx = \lim_{t\to\infty} \int_a^t f(x) dx$ $\int_{-\infty}^b f(x) dx = \lim_{t\to-\infty} \int_t^b f(x) dx$ $\int_{-\infty}^\infty f(x) dx = \int_{-\infty}^c f(x) dx + \int_c^\infty f(x) dx$ Type 2 (Discontinuous Integrand): If $f$ has discontinuity at $b$: $\int_a^b f(x) dx = \lim_{t\to b^-} \int_a^t f(x) dx$ If $f$ has discontinuity at $a$: $\int_a^b f(x) dx = \lim_{t\to a^+} \int_t^b f(x) dx$ If $f$ has discontinuity at $c \in (a,b)$: $\int_a^b f(x) dx = \int_a^c f(x) dx + \int_c^b f(x) dx$ An improper integral converges if the limit exists and is finite; otherwise, it diverges . 6. Introduction to Dynamics Definition: The branch of mechanics concerned with the forces that cause motion and the resulting changes in motion. Key Concepts: Force, Mass, Acceleration, Momentum, Energy. 7. Newton's Laws of Motion First Law (Inertia): An object at rest stays at rest and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. Second Law (Force & Acceleration): $\vec{F} = m\vec{a}$ (Net force equals mass times acceleration). $\vec{F}$ is the net force (vector sum of all forces). $m$ is the mass of the object. $\vec{a}$ is the acceleration of the object. Third Law (Action-Reaction): For every action, there is an equal and opposite reaction. If object A exerts a force on object B, then object B exerts an equal and opposite force on object A. 8. Types of Forces Gravitational Force: $F_g = mg$ (near Earth's surface) or $F = G\frac{m_1 m_2}{r^2}$ (universal). Normal Force ($N$): Force exerted by a surface perpendicular to the surface. Friction Force ($f$): Force opposing motion or tendency of motion. Static friction: $f_s \le \mu_s N$ Kinetic friction: $f_k = \mu_k N$ Tension ($T$): Force transmitted through a string, rope, cable, or wire. Spring Force (Hooke's Law): $F_s = -kx$, where $k$ is the spring constant and $x$ is the displacement from equilibrium. 9. Work, Energy, and Power Work ($W$): $W = \vec{F} \cdot \vec{d} = |\vec{F}| |\vec{d}| \cos\theta$. For variable force: $W = \int \vec{F} \cdot d\vec{r}$. Kinetic Energy ($KE$): $KE = \frac{1}{2}mv^2$. Potential Energy ($PE$): Gravitational: $PE_g = mgh$. Elastic (Spring): $PE_s = \frac{1}{2}kx^2$. Work-Energy Theorem: $W_{net} = \Delta KE = KE_f - KE_i$. Conservation of Mechanical Energy: If only conservative forces do work, $KE_i + PE_i = KE_f + PE_f$. Power ($P$): Rate at which work is done. $P = \frac{dW}{dt} = \vec{F} \cdot \vec{v}$. 10. Momentum and Impulse Linear Momentum ($\vec{p}$): $\vec{p} = m\vec{v}$. Impulse ($\vec{J}$): $\vec{J} = \vec{F}_{avg} \Delta t = \Delta \vec{p} = \vec{p}_f - \vec{p}_i$. For variable force: $\vec{J} = \int \vec{F} dt$. Conservation of Linear Momentum: In an isolated system (no external forces), total linear momentum remains constant. $\sum \vec{p}_{initial} = \sum \vec{p}_{final}$. Collisions: Elastic: Both momentum and kinetic energy are conserved. Inelastic: Momentum is conserved, but kinetic energy is not. Perfectly Inelastic: Objects stick together after collision; momentum conserved, maximum KE loss. 11. Rotational Dynamics Angular Position: $\theta$ (radians) Angular Velocity: $\omega = \frac{d\theta}{dt}$ Angular Acceleration: $\alpha = \frac{d\omega}{dt}$ Moment of Inertia ($I$): Rotational equivalent of mass. $I = \sum m_i r_i^2$ or $I = \int r^2 dm$. Torque ($\vec{\tau}$): Rotational equivalent of force. $\vec{\tau} = \vec{r} \times \vec{F}$. Magnitude: $\tau = rF\sin\theta$. Newton's Second Law for Rotation: $\sum \vec{\tau} = I \vec{\alpha}$. Rotational Kinetic Energy: $KE_{rot} = \frac{1}{2} I \omega^2$. Angular Momentum ($\vec{L}$): $\vec{L} = I\vec{\omega}$ or $\vec{L} = \vec{r} \times \vec{p}$. Conservation of Angular Momentum: If net external torque is zero, $\vec{L}$ is conserved. $I_i \omega_i = I_f \omega_f$.