Damped & Forced Oscillations
Cheatsheet Content
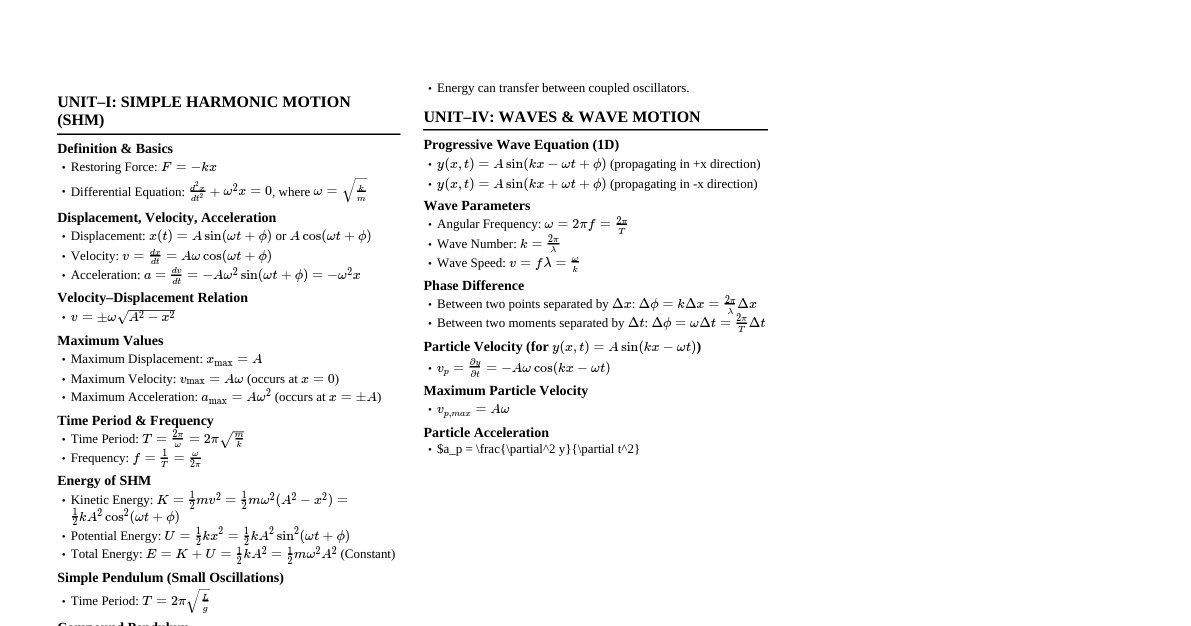
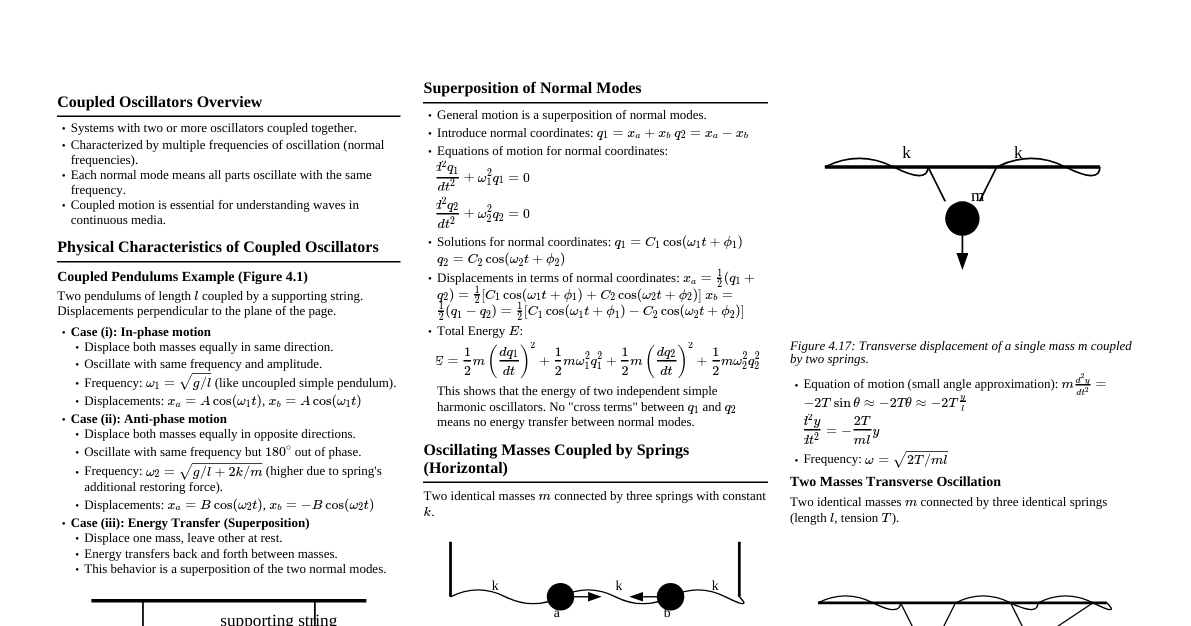
Damped Oscillations Oscillations where amplitude diminishes with time due to energy losses (friction, viscous heat generation). Not sinusoidal, more complex. Damped Harmonic Oscillator Subjected to two forces: Restoring Force: $F_x = -kx$ (proportional to displacement $x$, $k$ is force constant) Drag/Frictional Force: $F_d = -b\frac{dx}{dt}$ (proportional to velocity $v$, $b$ is damping constant) Newton's Second Law: $m\frac{d^2x}{dt^2} = -kx - b\frac{dx}{dt}$ Differential Equation: $$ \frac{d^2x}{dt^2} + \frac{b}{m}\frac{dx}{dt} + \frac{k}{m}x = 0 $$ Let $2\beta = \frac{b}{m}$ (damping coefficient) and $\omega_0^2 = \frac{k}{m}$ (natural frequency without damping). $$ \frac{d^2x}{dt^2} + 2\beta\frac{dx}{dt} + \omega_0^2x = 0 $$ General Solution: $x(t) = A_1e^{\alpha_1 t} + A_2e^{\alpha_2 t}$ Where $\alpha = -\beta \pm \sqrt{\beta^2 - \omega_0^2}$. Cases of Damped Oscillations Based on the discriminant $\beta^2 - \omega_0^2$ (or $b^2 - 4km$): Undamped ($\beta=0$): Equation: $\frac{d^2x}{dt^2} + \omega_0^2x = 0$ Solution: $x(t) = A\cos(\omega_0 t + \phi)$ (Simple Harmonic Motion, ideal oscillator). Underdamped ($\beta^2 Oscillatory motion with exponentially decaying amplitude. Let $\omega_1^2 = \omega_0^2 - \beta^2$. Solution: $x(t) = Ae^{-\beta t}\cos(\omega_1 t + \phi)$ $\omega_1 Energy $E = E_0 e^{-2\beta t}$, decays exponentially. Time Amplitude Ae$^{-\beta t}$ -Ae$^{-\beta t}$ Critically Damped ($\beta^2 = \omega_0^2$ or $b^2 = 4km$): No oscillations, system returns to equilibrium as fast as possible without oscillating. Solution: $x(t) = (A_1 + A_2 t)e^{-\beta t}$ Overdamped ($\beta^2 > \omega_0^2$ or $b^2 > 4km$): No oscillations, system returns to equilibrium slowly. Solution: $x(t) = A_1e^{-(\beta - \omega')t} + A_2e^{-(\beta + \omega')t}$ where $\omega' = \sqrt{\beta^2 - \omega_0^2}$. The second term decays faster. Characteristics of Damped Oscillations Relaxation Time ($\tau$) Time at which energy remains $1/e$ or $36.8\%$ of its initial value. $E = E_0 e^{-2\beta t} \implies \tau = \frac{1}{2\beta}$ Power Dissipation Rate at which energy is lost: $P = -\frac{dE}{dt} = 2\beta E = 2\beta E_0 e^{-2\beta t}$ Logarithmic Decrement ($\delta$) Natural log of the ratio of original amplitude to damped amplitude after one period $T'$ ($T' = 2\pi/\omega_1$). $\delta = \ln\left(\frac{A_0}{A(T')}\right) = \beta T'$ Quality Factor ($Q$) A measure of damping; $2\pi$ times the ratio of energy stored to energy lost per period. $Q = 2\pi \frac{\text{Energy at any time } t}{\text{Energy loss per period}} = \frac{\pi}{\beta T'} = \frac{\omega_0}{2\beta}$ For a weakly damped case ($\beta \ll \omega_0$), $Q \approx \frac{\omega_0}{2\beta}$. Forced Oscillations Oscillations where a body oscillates at a frequency different from its natural frequency due to an external periodic force. Forces involved: Restoring force: $F_x = -kx$ Damping force: $F_d = -b\frac{dx}{dt}$ Driving force: $F_{ext} = F_0 \sin(\omega_f t)$ ($\omega_f$ is driving frequency) Differential Equation: $$ m\frac{d^2x}{dt^2} + b\frac{dx}{dt} + kx = F_0 \sin(\omega_f t) $$ Dividing by $m$ and using $2\gamma = \frac{b}{m}$ and $\omega_0^2 = \frac{k}{m}$, $f_0 = \frac{F_0}{m}$: $$ \frac{d^2x}{dt^2} + 2\gamma\frac{dx}{dt} + \omega_0^2x = f_0 \sin(\omega_f t) $$ Solution for Forced Oscillations The general solution is a superposition of two parts: Transient State: Solution to the homogeneous equation (damped oscillation). This part decays exponentially and becomes negligible over time. Steady-State: Particular solution, represents the long-term behavior. The system oscillates at the driving frequency $\omega_f$ with constant amplitude. Steady-state solution: $x(t) = A \sin(\omega_f t - \phi)$ Amplitude $A = \frac{f_0}{\sqrt{(\omega_0^2 - \omega_f^2)^2 + (2\gamma\omega_f)^2}}$ Phase difference $\tan\phi = \frac{2\gamma\omega_f}{\omega_0^2 - \omega_f^2}$ Resonance The phenomenon where the amplitude of oscillation becomes maximum when the driving frequency $\omega_f$ approaches the natural frequency $\omega_0$ of the system. Amplitude Resonance Amplitude $A$ is maximum when $\omega_f = \omega_0$. When $\omega_f \ll \omega_0$: $A \approx \frac{f_0}{\omega_0^2} = \frac{F_0}{k}$ (amplitude depends only on restoring force). When $\omega_f \gg \omega_0$: $A \approx \frac{f_0}{\omega_f^2} = \frac{F_0}{m\omega_f^2}$. When $\omega_f = \omega_0$: $A_{max} = \frac{f_0}{2\gamma\omega_0} = \frac{F_0}{b\omega_0}$. The maximum amplitude is inversely proportional to damping coefficient $b$ (or $\gamma$). For $r=0$ (no damping), $A_{max} \to \infty$. $\omega_f$ A r=0 r=small r=large $\omega_0$ Velocity Resonance The velocity $v = \frac{dx}{dt}$ of the oscillator is maximum when the driving frequency $\omega_f$ equals the natural frequency $\omega_0$. Instantaneous velocity: $v(t) = A\omega_f \cos(\omega_f t - \phi)$ Maximum velocity amplitude $V_0 = \frac{f_0 \omega_f}{\sqrt{(\omega_0^2 - \omega_f^2)^2 + (2\gamma\omega_f)^2}}$ Velocity resonance occurs when $\omega_f = \omega_0$, resulting in $V_{0,max} = \frac{f_0}{2\gamma} = \frac{F_0}{b}$. At velocity resonance, the phase difference $\phi = 0$ (velocity is in phase with driving force). Sharpness of Resonance Describes how quickly the amplitude (or power) drops as the driving frequency moves away from the resonant frequency. It is quantified by the Quality Factor $Q = \frac{\omega_0}{\omega_2 - \omega_1}$, where $\omega_1$ and $\omega_2$ are the frequencies at which the power absorbed is half of its maximum value (half-power points). A higher Q factor means a sharper resonance curve (less damping). $\omega_f$ Power $\omega_0$ $\omega_1$ $\omega_2$ Sharpness = $\frac{\omega_0}{\omega_2 - \omega_1}$ Power Absorbed by a Forced Oscillator Average power absorbed: $\langle P_{ab} \rangle = \frac{m f_0^2 \omega_f \sin\phi}{2\gamma\omega_f}$ At resonance ($\omega_f = \omega_0$): $\langle P_{ab} \rangle_{max} = \frac{m f_0^2}{4\gamma} = \frac{F_0^2}{4b}$. The power absorbed is maximum at resonance and is related to the damping coefficient $b$.