Laws of Motion (JEE)
Cheatsheet Content
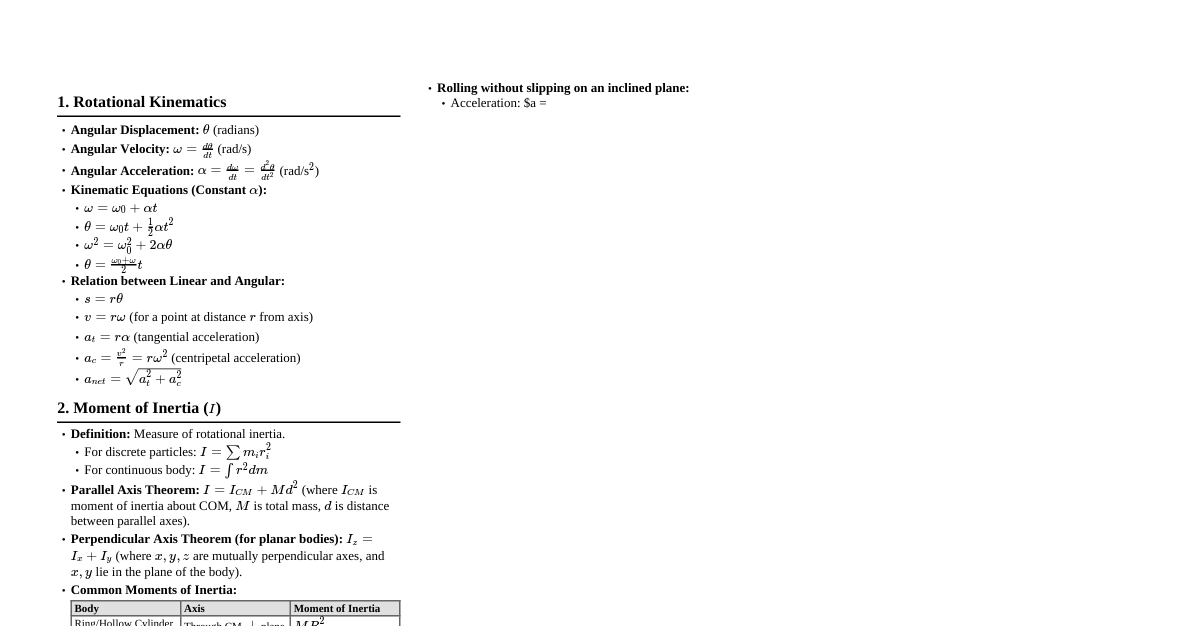
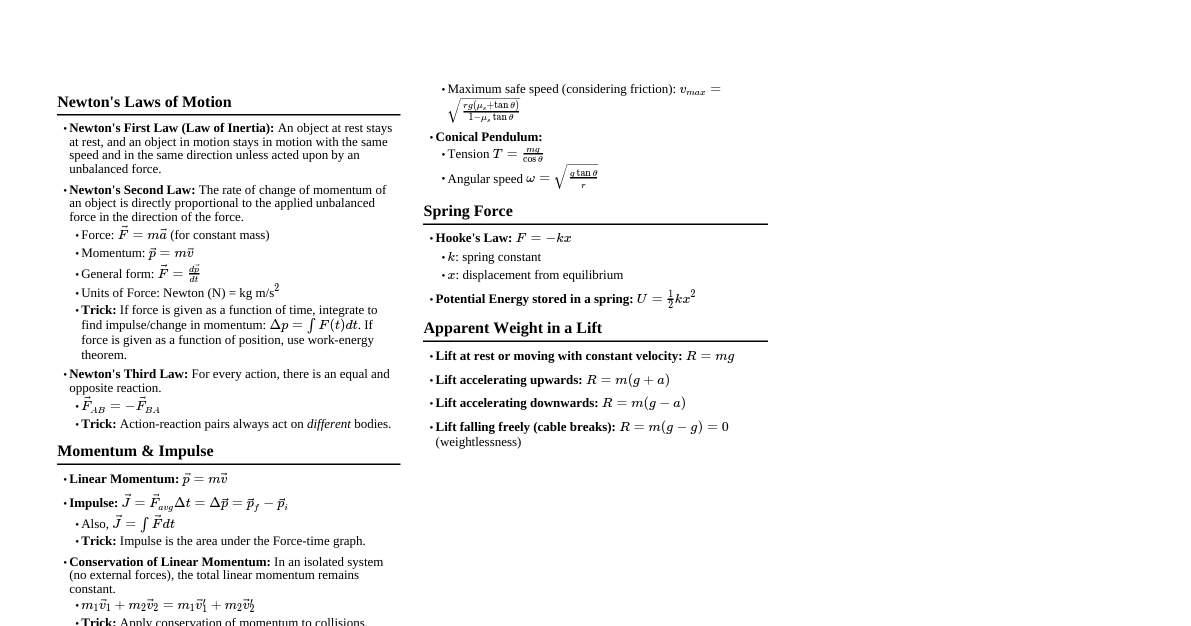
### Newton's First Law (Law of Inertia) - An object at rest stays at rest, and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. - **Inertia:** The inherent property of a body by virtue of which it resists any change in its state of rest or uniform motion. - **Types:** Inertia of rest, inertia of motion, inertia of direction. - **Inertial Frame of Reference:** A non-accelerating frame of reference. Newton's laws are valid in these frames. ### Newton's Second Law - **Rate of change of momentum:** The rate of change of momentum of a body is directly proportional to the applied force and takes place in the direction in which the force acts. - $\vec{F} \propto \frac{d\vec{p}}{dt}$ - $\vec{F} = k \frac{d\vec{p}}{dt}$ (where $k=1$ in SI units) - $\vec{F} = \frac{d(m\vec{v})}{dt} = m\frac{d\vec{v}}{dt} = m\vec{a}$ (for constant mass) - **Units of Force:** - SI: Newton (N) = $kg \cdot m/s^2$ - CGS: Dyne = $g \cdot cm/s^2$ ($1 N = 10^5 Dyne$) - **Impulse:** Change in momentum ($\vec{J} = \Delta\vec{p} = \int \vec{F} dt = \vec{F}_{avg} \Delta t$). - Impulse-Momentum Theorem: Impulse applied to an object equals the change in its momentum. ### Newton's Third Law - To every action, there is always an equal and opposite reaction. - **Action-Reaction Pairs:** - Act on different bodies. - Are always equal in magnitude and opposite in direction. - Are simultaneous. - Are always of the same nature (e.g., gravitational, electrical). ### Free Body Diagrams (FBDs) - A diagram showing all external forces acting on an isolated body. - **Steps:** 1. Isolate the body. 2. Draw all forces acting *on* the body (gravity, normal, tension, friction, applied force, etc.). 3. Resolve forces into components along chosen axes (usually perpendicular). 4. Apply Newton's Second Law ($\sum \vec{F} = m\vec{a}$). ### Common Forces - **Weight (Gravity):** $\vec{W} = m\vec{g}$ (always acts vertically downwards). - **Normal Force (N):** Force exerted by a surface perpendicular to it, preventing objects from passing through. - **Tension (T):** Force transmitted through a string, rope, cable, or wire when pulled tight. Always acts along the string. - **Friction (f):** Force opposing relative motion or tendency of motion between surfaces in contact. - **Static Friction ($f_s$):** $f_s \le \mu_s N$ (acts when there is no relative motion). - **Kinetic Friction ($f_k$):** $f_k = \mu_k N$ (acts when there is relative motion). - $\mu_s \ge \mu_k$. ### Spring Force - **Hooke's Law:** $F_s = -kx$ - $k$: spring constant (N/m) - $x$: displacement from equilibrium position (m) - Negative sign indicates restoring nature. ### Apparent Weight in a Lift - **Lift at rest or moving with constant velocity ($a=0$):** $N = mg$ - **Lift accelerating upwards ($a$):** $N = m(g+a)$ - **Lift accelerating downwards ($a$):** $N = m(g-a)$ - **Lift falling freely ($a=g$):** $N = 0$ (weightlessness) ### Constraint Motion - **Pulleys:** - **Massless and frictionless pulleys:** Tension in the string on both sides of the pulley is equal. - **Fixed pulley:** Changes direction of force. - **Movable pulley:** Reduces effort. - **Strings:** Inextensible strings mean the magnitude of velocity and acceleration of connected bodies along the string are equal. - **Wedge Constraints:** The relative velocity/acceleration perpendicular to the contact surface is zero. ### Equilibrium of Forces - A body is in equilibrium if the net force acting on it is zero ($\sum \vec{F} = 0$). - This implies zero acceleration (body is at rest or moving with constant velocity). - **Lami's Theorem:** For three concurrent forces $\vec{F_1}, \vec{F_2}, \vec{F_3}$ in equilibrium, $$\frac{F_1}{\sin\alpha} = \frac{F_2}{\sin\beta} = \frac{F_3}{\sin\gamma}$$ where $\alpha, \beta, \gamma$ are the angles opposite to $F_1, F_2, F_3$ respectively.