Vector Differential Calculus
Cheatsheet Content
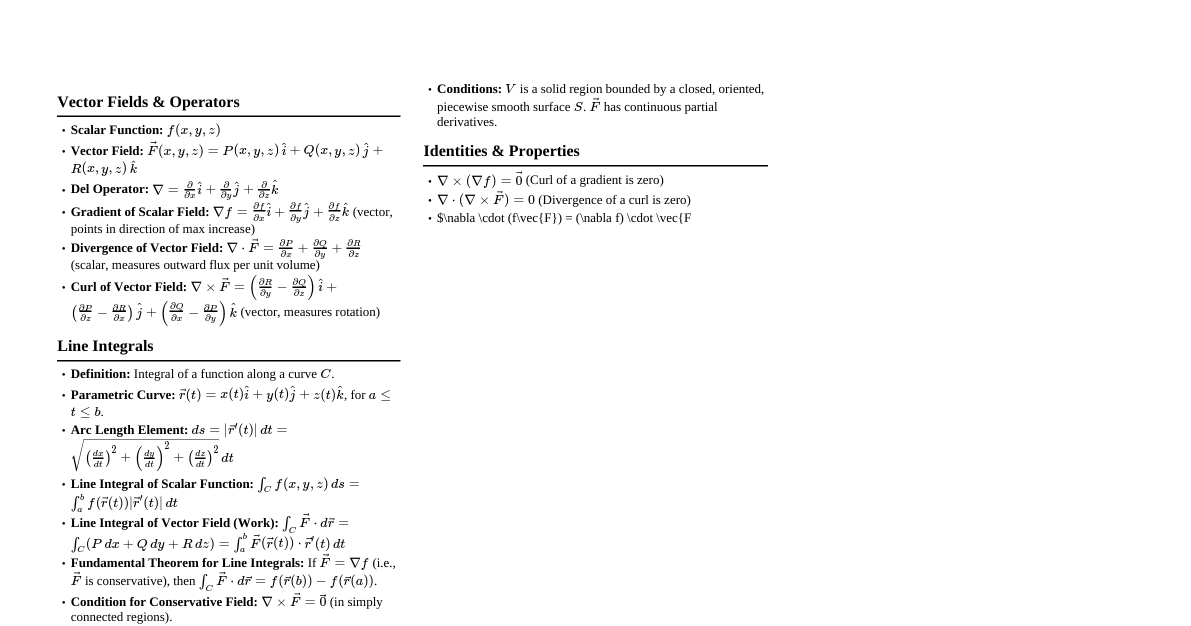
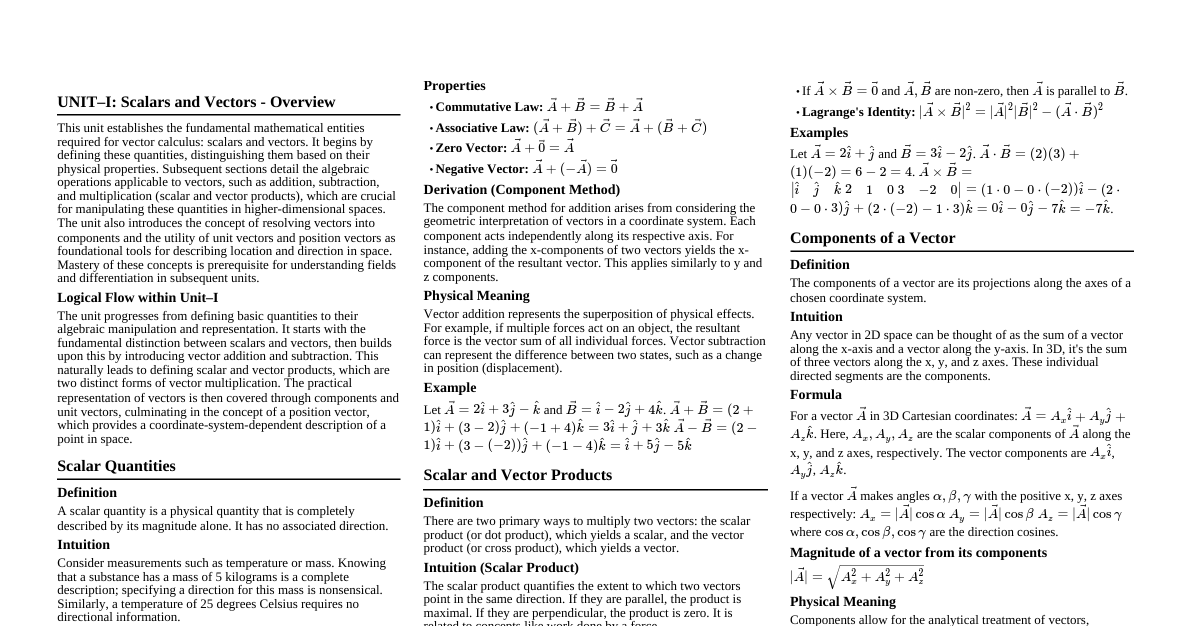
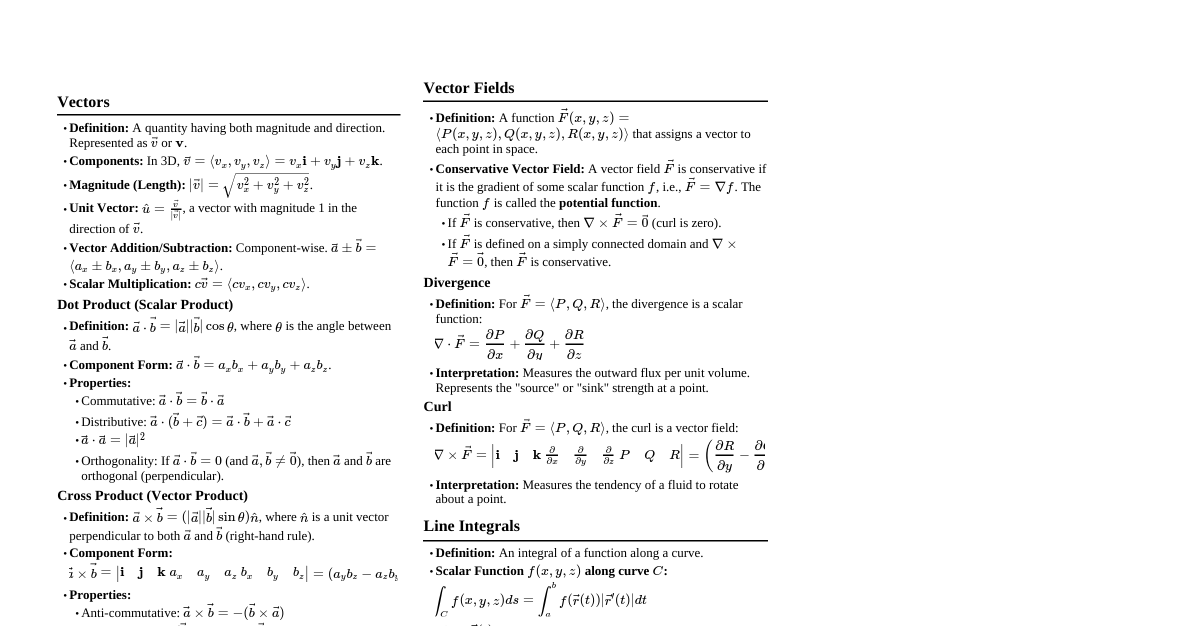
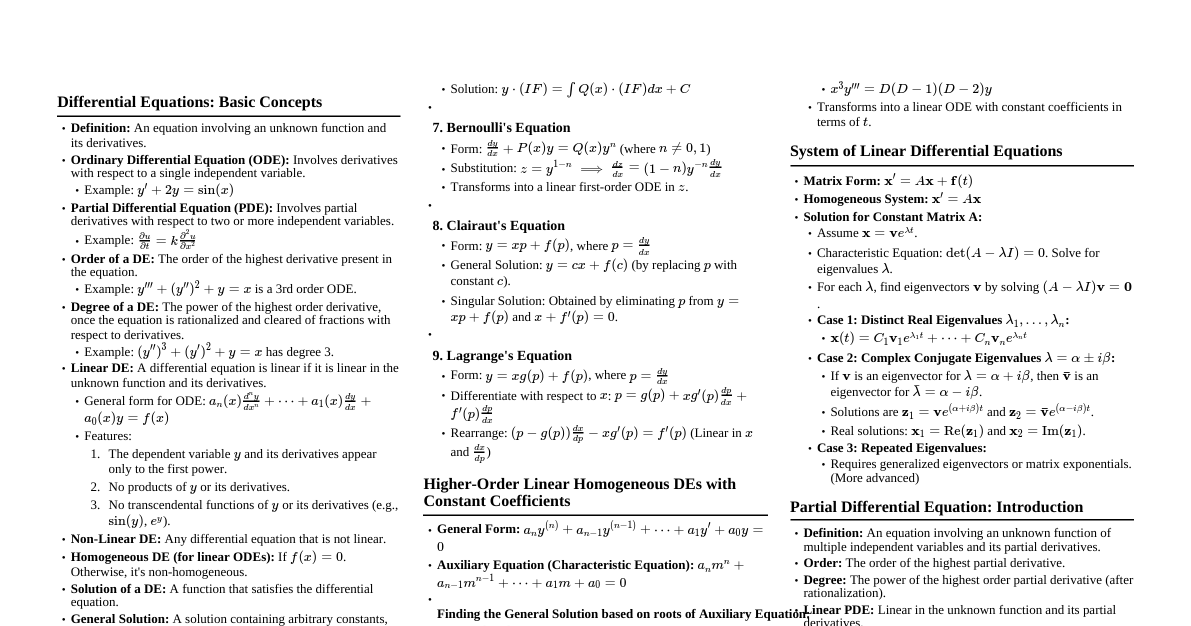
Vector Differential Calculus Vector differential calculus deals with the differentiation of vector fields and scalar fields, crucial for understanding physical phenomena. Physical Interpretation of Vector Differentiation Vector differentiation helps understand how physical quantities (like velocity, acceleration, fluid flow, electromagnetic fields) vary in space and time. Vectors: Basic Concepts Definition: Quantities with magnitude and direction, represented as $\vec{A} = A_x \hat{i} + A_y \hat{j} + A_z \hat{k}$. Addition: $\vec{A} + \vec{B} = (A_x + B_x)\hat{i} + (A_y + B_y)\hat{j} + (A_z + B_z)\hat{k}$ Scalar Multiplication: $\lambda \vec{A} = (\lambda A_x)\hat{i} + (\lambda A_y)\hat{j} + (\lambda A_z)\hat{k}$ Dot Product (Scalar Product): $\vec{A} \cdot \vec{B} = A_x B_x + A_y B_y + A_z B_z$ (scalar result) Cross Product (Vector Product): $\vec{A} \times \vec{B} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ A_x & A_y & A_z \\ B_x & B_y & B_z \end{vmatrix}$ (vector result, perpendicular to $\vec{A}$ and $\vec{B}$) Vector Differentiation (Single Variable) For a vector function $\vec{F}(t) = F_1(t)\hat{i} + F_2(t)\hat{j} + F_3(t)\hat{k}$ with respect to a scalar variable $t$: Derivative: $\frac{d\vec{F}}{dt} = \frac{dF_1}{dt}\hat{i} + \frac{dF_2}{dt}\hat{j} + \frac{dF_3}{dt}\hat{k}$ General Rules: $\frac{d}{dt}(\vec{F} + \vec{G}) = \frac{d\vec{F}}{dt} + \frac{d\vec{G}}{dt}$ $\frac{d}{dt}(\vec{F} \cdot \vec{G}) = \vec{F} \cdot \frac{d\vec{G}}{dt} + \frac{d\vec{F}}{dt} \cdot \vec{G}$ $\frac{d}{dt}(\vec{F} \times \vec{G}) = \vec{F} \times \frac{d\vec{G}}{dt} + \frac{d\vec{F}}{dt} \times \vec{G}$ Physical Applications Motion of a Particle: Position Vector: $\vec{r}(t) = x(t)\hat{i} + y(t)\hat{j} + z(t)\hat{k}$ Velocity Vector: $\vec{v}(t) = \frac{d\vec{r}}{dt} = \frac{dx}{dt}\hat{i} + \frac{dy}{dt}\hat{j} + \frac{dz}{dt}\hat{k}$ Acceleration Vector: $\vec{a}(t) = \frac{d\vec{v}}{dt} = \frac{d^2\vec{r}}{dt^2}$ Fluid Flow: Velocity field $\vec{v}(\vec{r}, t)$ describes fluid particle velocity. Electromagnetism: Electric and magnetic fields are vector fields representing forces. Vector Differential Operator (Nabla/Del) Definition: $\nabla = \frac{\partial}{\partial x}\hat{i} + \frac{\partial}{\partial y}\hat{j} + \frac{\partial}{\partial z}\hat{k}$ Used to describe how scalar and vector fields change in space. Scalar and Vector Fields Scalar Field: Assigns a scalar value to each point in space, e.g., temperature $\phi(x,y,z)$. Vector Field: Assigns a vector to each point in space, e.g., velocity field $\vec{F}(x,y,z)$. Gradient ($\nabla \phi$) Definition: For a scalar field $\phi(x,y,z)$, the gradient is a vector field: $$\nabla \phi = \frac{\partial \phi}{\partial x}\hat{i} + \frac{\partial \phi}{\partial y}\hat{j} + \frac{\partial \phi}{\partial z}\hat{k}$$ Geometrical Interpretation: Points in the direction of the greatest rate of increase of $\phi$. Always perpendicular (normal) to the level surface $\phi(x,y,z) = c$. Magnitude $|\nabla \phi|$ indicates the maximum rate of change. Applications: Heat transfer (direction of heat flow), fluid dynamics (pressure gradient), electrical potential. Directional Derivative (D.D.) Definition: The rate of change of a scalar field $\phi$ in a specific direction specified by a unit vector $\hat{a}$. $$D_{\hat{a}}\phi = \nabla \phi \cdot \hat{a}$$ If $\vec{a}$ is a vector, $\hat{a} = \frac{\vec{a}}{|\vec{a}|}$. Maximum D.D.: Occurs in the direction of $\nabla \phi$, with magnitude $|\nabla \phi|$. Divergence ($\nabla \cdot \vec{F}$) Definition: For a vector field $\vec{F} = F_1\hat{i} + F_2\hat{j} + F_3\hat{k}$: $$\nabla \cdot \vec{F} = \frac{\partial F_1}{\partial x} + \frac{\partial F_2}{\partial y} + \frac{\partial F_3}{\partial z}$$ Physical Interpretation: Measures the net outflow of flux from a point (per unit volume). $\nabla \cdot \vec{F} > 0$: Source (fluid emanating) $\nabla \cdot \vec{F} $\nabla \cdot \vec{F} = 0$: No net outflow/inflow. Solenoidal Field: A vector field $\vec{F}$ is solenoidal if $\nabla \cdot \vec{F} = 0$. Curl ($\nabla \times \vec{F}$) Definition: For a vector field $\vec{F} = F_1\hat{i} + F_2\hat{j} + F_3\hat{k}$: $$\nabla \times \vec{F} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ F_1 & F_2 & F_3 \end{vmatrix}$$ Physical Interpretation: Measures the rotational tendency or angular velocity at any point within the vector field. Irrotational Field: A vector field $\vec{F}$ is irrotational if $\nabla \times \vec{F} = 0$. This means there is no local rotation. Conservative Fields and Scalar Potential Conservative Field: A vector field $\vec{F}$ is conservative if it can be expressed as the gradient of some scalar potential function $\phi$, i.e., $\vec{F} = \nabla \phi$. Properties: If $\vec{F}$ is conservative, then it is irrotational ($\nabla \times \vec{F} = 0$). The work done by a conservative force field on an object depends only on the initial and final positions, not the path. Scalar Potential ($\phi$): If $\vec{F}$ is irrotational, a scalar potential $\phi$ exists such that $\vec{F} = \nabla \phi$. To find $\phi$: Integrate $\vec{F} \cdot d\vec{r} = d\phi$. $$\phi = \int F_1 dx + \int (\text{terms of } F_2 \text{ free from } x) dy + \int (\text{terms of } F_3 \text{ free from } x, y) dz + C$$ Vector Identities Given scalar function $\phi$ and vector functions $\vec{u}, \vec{v}$: Product Rule for Divergence: $\nabla \cdot (\phi \vec{u}) = \nabla \phi \cdot \vec{u} + \phi (\nabla \cdot \vec{u})$ Product Rule for Curl: $\nabla \times (\phi \vec{u}) = \nabla \phi \times \vec{u} + \phi (\nabla \times \vec{u})$ Divergence of Cross Product: $\nabla \cdot (\vec{u} \times \vec{v}) = \vec{v} \cdot (\nabla \times \vec{u}) - \vec{u} \cdot (\nabla \times \vec{v})$ Curl of Cross Product: $\nabla \times (\vec{u} \times \vec{v}) = \vec{u}(\nabla \cdot \vec{v}) - (\vec{u} \cdot \nabla)\vec{v} + (\vec{v} \cdot \nabla)\vec{u} - \vec{v}(\nabla \cdot \vec{u})$ Gradient of Dot Product: $\nabla (\vec{u} \cdot \vec{v}) = \vec{u} \times (\nabla \times \vec{v}) + (\vec{u} \cdot \nabla)\vec{v} + \vec{v} \times (\nabla \times \vec{u}) + (\vec{v} \cdot \nabla)\vec{u}$ Second Order Differential Operators Divergence of Gradient (Laplacian): $\nabla \cdot (\nabla \phi) = \nabla^2 \phi = \frac{\partial^2 \phi}{\partial x^2} + \frac{\partial^2 \phi}{\partial y^2} + \frac{\partial^2 \phi}{\partial z^2}$ Curl of Gradient: $\nabla \times (\nabla \phi) = 0$ (The curl of a gradient of any scalar field is always zero) Divergence of Curl: $\nabla \cdot (\nabla \times \vec{u}) = 0$ (The divergence of the curl of any vector field is always zero) Curl of Curl: $\nabla \times (\nabla \times \vec{u}) = \nabla (\nabla \cdot \vec{u}) - \nabla^2 \vec{u}$ Common Identities for Position Vector $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ and $r = |\vec{r}|$ $\nabla \cdot \vec{r} = 3$ $\nabla \times \vec{r} = 0$ $\nabla r^n = n r^{n-2} \vec{r}$ $\nabla \cdot (r^n \vec{r}) = (n+3)r^n$ $\nabla \times (r^n \vec{r}) = 0$ $\nabla f(r) = f'(r) \frac{\vec{r}}{r}$