Rotational Mechanics & Chemica
Cheatsheet Content
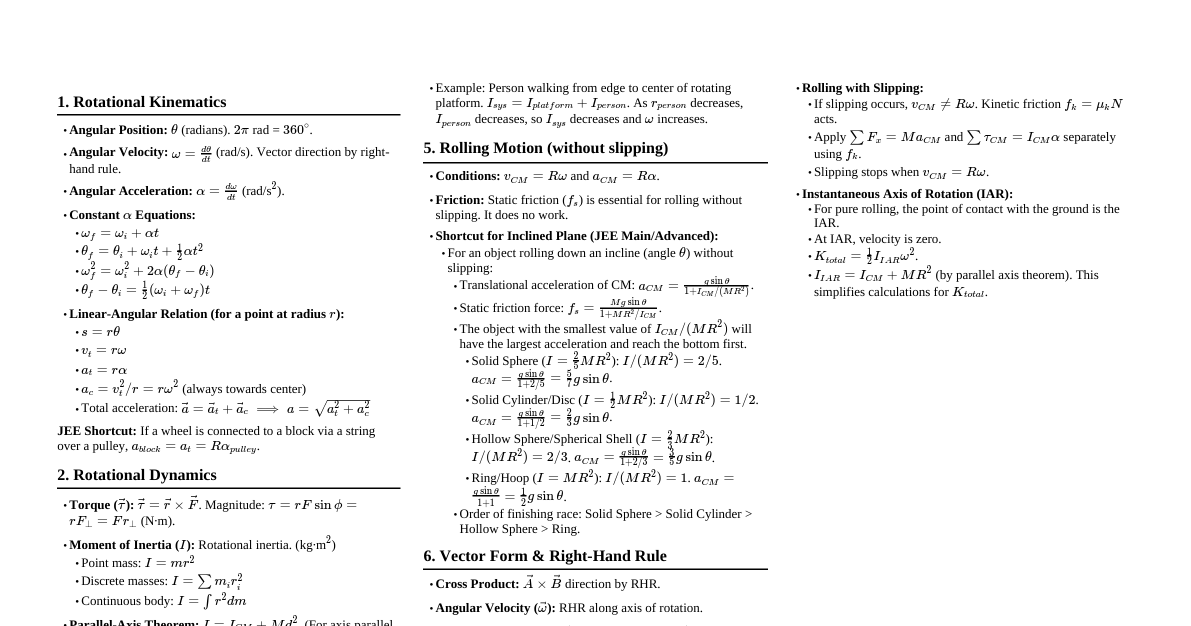
### Rotational Mechanics: Introduction Rotational motion describes the movement of an object around an axis. Key concepts include angular displacement, velocity, and acceleration, which are analogous to their linear counterparts. #### Linear vs. Rotational Motion Analogies | Linear Motion | Rotational Motion | |---|---| | Position: $x$ | Angular Position: $\theta$ | | Velocity: $v = \frac{dx}{dt}$ | Angular Velocity: $\omega = \frac{d\theta}{dt}$ | | Acceleration: $a = \frac{dv}{dt}$ | Angular Acceleration: $\alpha = \frac{d\omega}{dt}$ | | Mass (linear inertia): $m$ | Moment of Inertia: $I$ | | Newton's 2nd Law: $F=ma$ | Newton's 2nd Law: $\tau = I\alpha$ | | Momentum: $p=mv$ | Angular Momentum: $L=I\omega$ | | Kinetic Energy: $\frac{1}{2}mv^2$ | Rotational Kinetic Energy: $\frac{1}{2}I\omega^2$ | | Work: $W=Fd$ | Work: $W=\tau\theta$ | | Power: $P=Fv$ | Power: $P=\tau\omega$ | #### Motion Equations | Linear Motion | Rotational Motion | |---|---| | $v = v_0 + at$ | $\omega = \omega_0 + \alpha t$ | | $x = v_0 t + \frac{1}{2}at^2$ | $\theta = \omega_0 t + \frac{1}{2}\alpha t^2$ | | $v^2 = v_0^2 + 2ax$ | $\omega^2 = \omega_0^2 + 2\alpha\theta$ | #### Angular Quantities & Units - **Angular Position ($\theta$):** Measured in radians (dimensionless). - **Angular Velocity ($\omega$):** Rate of change of angular position. Measured in radians/second (rad/s). - Defined as: $\omega = \frac{d\theta}{dt}$ - **Angular Acceleration ($\alpha$):** Rate of change of angular velocity. Measured in radians/second$^2$ (rad/s$^2$). - Defined as: $\alpha = \frac{d\omega}{dt}$ #### Relation between Linear & Angular Quantities (for circular motion) For a point at distance $r$ from the axis of rotation: - **Arc Length ($s$):** $s = r\theta$ - **Tangential Velocity ($v_t$):** $v_t = r\omega$ - **Tangential Acceleration ($a_t$):** $a_t = r\alpha$ - Note: Linear quantities are measured tangentially to the circular path. #### Vector Form - **Linear Velocity:** $\vec{v} = \vec{\omega} \times \vec{r}$ - Direction of $\vec{\omega}$ is given by the Right-Hand Rule. - **Angular Velocity of a particle ($P$) w.r.t. origin ($O$):** $\omega = \frac{|\vec{v}| \sin\theta}{r}$ - Where $\theta$ is the angle between $\vec{r}$ and $\vec{v}$. #### Points to Remember - If a particle moves in a circle, its angular velocity about the center is twice its angular velocity about any point on the circumference. - For a rigid body rotating about a fixed axis, all particles have the same angular speed ($\omega$) but different linear speeds ($v = r\omega$) if $r$ varies. ### Moment of Inertia ($I$) Moment of inertia is the rotational equivalent of mass, representing an object's resistance to changes in its rotational motion. #### Definition - **For a point mass $m$ at distance $r$ from axis:** $I = mr^2$ - **For a system of particles:** $I = \sum_i m_i r_i^2$ - **For a continuous body:** $I = \int r^2 dm$ #### Theorems on Moment of Inertia 1. **Perpendicular Axis Theorem (for planar bodies only):** If a planar body lies in the XY-plane, then $I_z = I_x + I_y$. - $I_x = \sum m_i y_i^2$ - $I_y = \sum m_i x_i^2$ - $I_z = \sum m_i (x_i^2 + y_i^2)$ 2. **Parallel Axis Theorem (for all types of bodies):** $I_{AB} = I_{CM} + Md^2$ - $I_{AB}$: Moment of inertia about an axis $AB$. - $I_{CM}$: Moment of inertia about a parallel axis passing through the center of mass ($CM$). - $M$: Total mass of the body. - $d$: Perpendicular distance between the two parallel axes. - **Note:** $I_{CM}$ is always the minimum moment of inertia for a set of parallel axes. #### Moments of Inertia for Various Bodies - **Thin Rod (length $L$, mass $M$):** - About an axis perpendicular to rod, through CM: $I = \frac{1}{12}ML^2$ - About an axis perpendicular to rod, through one end: $I = \frac{1}{3}ML^2$ - About an axis inclined at $\theta$ to the rod, through CM: $I = \frac{1}{12}ML^2 \sin^2\theta$ - About an axis inclined at $\theta$ to the rod, through one end: $I = \frac{1}{3}ML^2 \sin^2\theta$ - **Uniform Rectangular Lamina (mass $M$, length $L$, width $b$):** - About an axis through CM, parallel to width ($b$): $I = \frac{1}{12}ML^2$ - About an axis through CM, parallel to length ($L$): $I = \frac{1}{12}Mb^2$ - About an axis perpendicular to the plane, through CM: $I_z = I_x + I_y = \frac{1}{12}M(L^2 + b^2)$ - **Square Lamina (side $a$, mass $M$):** - About an axis perpendicular to the plane, through CM: $I_z = \frac{1}{6}Ma^2$ - **Uniform Circular Ring (mass $M$, radius $R$):** - About an axis perpendicular to plane, through center: $I = MR^2$ - About a diametrical axis: $I_d = \frac{1}{2}MR^2$ (from perpendicular axis theorem: $I_z = I_x + I_y = 2I_d$) - About a tangential axis (in plane): $I_t = I_d + MR^2 = \frac{3}{2}MR^2$ - About a tangential axis (perpendicular to plane): $I_t = I_z + MR^2 = 2MR^2$ - **Uniform Circular Disc (mass $M$, radius $R$):** - About an axis perpendicular to plane, through center: $I = \frac{1}{2}MR^2$ - About a diametrical axis: $I_d = \frac{1}{4}MR^2$ - About a tangential axis (in plane): $I_t = I_d + MR^2 = \frac{5}{4}MR^2$ - About a tangential axis (perpendicular to plane): $I_t = I_z + MR^2 = \frac{3}{2}MR^2$ - **Hollow Cylinder (mass $M$, radius $R$):** $I = MR^2$ - **Solid Cylinder (mass $M$, radius $R$):** $I = \frac{1}{2}MR^2$ - **Thin Spherical Shell (mass $M$, radius $R$):** - About a diametrical axis: $I = \frac{2}{3}MR^2$ - About a tangential axis: $I_t = I_d + MR^2 = \frac{5}{3}MR^2$ - **Solid Sphere (mass $M$, radius $R$):** - About a diametrical axis: $I = \frac{2}{5}MR^2$ - About a tangential axis: $I_t = I_d + MR^2 = \frac{7}{5}MR^2$ - **Hollow Cone (mass $M$, radius $R$, height $H$):** - About its axis: $I = \frac{1}{2}MR^2$ - **Solid Cone (mass $M$, radius $R$, height $H$):** - About its axis: $I = \frac{3}{10}MR^2$ ### Radius of Gyration ($K$) The radius of gyration is the distance from the axis of rotation where the entire mass of the body is assumed to be concentrated to have the same moment of inertia. - **Definition:** $I = MK^2 \implies K = \sqrt{\frac{I}{M}}$ ### Torque & Angular Momentum #### Torque ($\tau$) Torque is the rotational equivalent of force, causing angular acceleration. - **Definition:** $\vec{\tau} = \vec{r} \times \vec{F}$ - **Magnitude:** $\tau = rF\sin\theta$, where $\theta$ is the angle between $\vec{r}$ and $\vec{F}$. - **Torque about an axis $AB$:** $\tau_{AB} = (\vec{\tau} \cdot \hat{n}_{AB})$, where $\hat{n}_{AB}$ is the unit vector along $AB$. - **Important:** Torque about an axis (or angular momentum about an axis) is independent of the choice of point on the axis. #### Angular Momentum ($L$) Angular momentum is the rotational equivalent of linear momentum. - **For a particle:** $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times (m\vec{v})$ - **For a rigid body:** $\vec{L} = I\vec{\omega}$ - **Rate of change of angular momentum:** $\vec{\tau}_{net} = \frac{d\vec{L}}{dt}$ - This is the rotational analog of Newton's second law ($\vec{F}_{net} = \frac{d\vec{p}}{dt}$). - For a system of particles, $\vec{\tau}_{net}$ includes only external torques. #### Conservation of Angular Momentum - If the net external torque on a system is zero ($\vec{\tau}_{net} = 0$), then the total angular momentum of the system remains constant ($\vec{L} = \text{constant}$). - For a rigid body rotating about a fixed axis (e.g., z-axis): $L_z = I\omega = \text{constant}$. - If $I$ changes (e.g., by mass redistribution), $\omega$ must change to keep $L_z$ constant. (e.g., ice skater pulling arms in). #### Angular Impulse - **Definition:** $\vec{A} = \int \vec{\tau} dt = \Delta \vec{L}$ (change in angular momentum). ### Rotational Kinetic Energy - **For a rigid body:** $K_{rot} = \frac{1}{2}I\omega^2$ - **For a general motion (translation + rotation):** $K = K_{trans} + K_{rot} = \frac{1}{2}MV_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ - Where $V_{CM}$ is the velocity of the center of mass and $I_{CM}$ is the moment of inertia about the center of mass. ### Rolling Motion Rolling motion is a combination of translation and rotation. #### Pure Rolling (Rolling without Slipping) - **Condition:** The point of contact between the rolling body and the surface is instantaneously at rest. - **Relationship:** $v_{CM} = R\omega$ - Where $v_{CM}$ is the linear velocity of the center of mass and $R$ is the radius of the body. - **Acceleration:** $a_{CM} = R\alpha$ - **Friction in pure rolling:** Static friction acts to prevent slipping. Its direction depends on whether the body is speeding up or slowing down. - **Important:** If an external force is applied at height $h$ above CM, the direction of static friction depends on $h$. #### Instantaneous Axis of Rotation (IAR) - **Definition:** For pure rolling, the point of contact with the surface is the IAR. All points on the body can be considered to be undergoing pure rotation about this axis at that instant. - Velocity of any point $P$ is $v_P = \omega r_P$, where $r_P$ is the distance from the IAR to $P$. - **Note:** The IAR is instantaneously at rest, but its acceleration is generally not zero. #### Rolling on an Inclined Plane - For a body rolling down an inclined plane (angle $\theta$) without slipping: - **Acceleration of CM:** $a_{CM} = \frac{g\sin\theta}{1 + \frac{I_{CM}}{MR^2}}$ - **Static Friction Force:** $f_s = \frac{I_{CM}}{R^2} a_{CM} = \frac{I_{CM}}{R^2} \frac{g\sin\theta}{1 + \frac{I_{CM}}{MR^2}}$ - **Condition for pure rolling:** $f_s \le \mu_s N \implies \mu_s \ge \frac{\tan\theta}{1 + \frac{MR^2}{I_{CM}}}$ - **Note:** The acceleration depends on the shape of the body ($I_{CM}/MR^2$ ratio) but not on its mass or radius. - **Order of acceleration (fastest to slowest):** Solid sphere > Disc/Solid cylinder > Thin spherical shell > Ring/Hollow cylinder. #### Toppling - **Condition:** Occurs when the line of action of the normal force shifts to the edge of the base, causing the body to rotate about that edge. - **Criterion:** Torque due to applied force exceeds the restoring torque due to gravity. - **Factors affecting toppling:** Base width, height of CM, coefficient of friction. ### Chemical Equilibrium: Introduction Chemical equilibrium is a state where the rates of forward and reverse reactions are equal, and the net concentrations of reactants and products remain constant. #### Reversible Reactions - Reactions that can proceed in both forward and reverse directions. - Represented by a double arrow ($\rightleftharpoons$). - At equilibrium, reactants and products coexist. #### Characteristics of Chemical Equilibrium - **Dynamic in nature:** Reactions are still occurring, but at equal rates. - **Constant observable properties:** Concentrations, pressure, density, color remain constant. - **Attainable from either side:** Equilibrium can be reached starting with either reactants or products. - **Catalyst effect:** A catalyst speeds up both forward and reverse reactions equally, reducing the time to reach equilibrium but not altering the equilibrium position or the equilibrium constant. #### Types of Equilibria - **Homogeneous equilibrium:** All reactants and products are in the same phase (e.g., all gases, all liquids). - **Heterogeneous equilibrium:** Reactants and products are in different phases (e.g., solid and gas, liquid and gas). ### Rate of Reaction The rate of a reaction is the change in concentration of reactants or products per unit time. - **For $aA + bB \to cC + dD$:** Rate $= -\frac{1}{a}\frac{d[A]}{dt} = -\frac{1}{b}\frac{d[B]}{dt} = \frac{1}{c}\frac{d[C]}{dt} = \frac{1}{d}\frac{d[D]}{dt}$ - Negative sign for reactants indicates decreasing concentration. - Units: mol L$^{-1}$ s$^{-1}$ or M s$^{-1}$. #### Factors Influencing Reaction Rate - **Concentration of reactants:** Higher concentration usually leads to higher rate. - **Temperature:** Rate generally increases with temperature (rule of thumb: doubles for every 10°C rise). - **Nature of reactants:** Some reactions are inherently faster than others due to bond strengths, etc. - **Catalyst:** Increases reaction rate without being consumed. - **Surface area:** For heterogeneous reactions, larger surface area increases rate. - **Radiation/Light:** Some reactions are photosensitive. ### Equilibrium Constant ($K$) The equilibrium constant expresses the relationship between product and reactant concentrations at equilibrium. #### Law of Mass Action For a reversible reaction $aA + bB \rightleftharpoons mM + nN$: - **Rate of forward reaction ($R_f$):** $R_f = k_f [A]^a [B]^b$ - **Rate of reverse reaction ($R_r$):** $R_r = k_r [M]^m [N]^n$ - **At equilibrium:** $R_f = R_r \implies k_f [A]^a [B]^b = k_r [M]^m [N]^n$ - **Equilibrium Constant ($K_c$):** $K_c = \frac{k_f}{k_r} = \frac{[M]^m [N]^n}{[A]^a [B]^b}$ - $K_c$ is based on molar concentrations. - **Important:** For heterogeneous equilibria, concentrations of pure solids and pure liquids are considered constant and are omitted from the $K_c$ expression (effectively equal to 1). #### Pressure Equilibrium Constant ($K_p$) - For gaseous reactions, $K_p$ is expressed in terms of partial pressures. - For $aA(g) + bB(g) \rightleftharpoons mM(g) + nN(g)$: $K_p = \frac{(P_M)^m (P_N)^n}{(P_A)^a (P_B)^b}$ #### Relationship between $K_p$ and $K_c$ $K_p = K_c (RT)^{\Delta n}$ - $R$: Ideal gas constant (0.0821 L atm mol$^{-1}$ K$^{-1}$ or 8.314 J mol$^{-1}$ K$^{-1}$) - $T$: Absolute temperature in Kelvin. - $\Delta n = (\text{moles of gaseous products}) - (\text{moles of gaseous reactants})$ - **Note:** If $\Delta n = 0$, then $K_p = K_c$. #### Important Relationships Involving $K$ - **Reversing a reaction:** If $K$ is the equilibrium constant for $A \rightleftharpoons B$, then $K' = \frac{1}{K}$ for $B \rightleftharpoons A$. - **Multiplying coefficients by $m$:** If $K$ is for $A \rightleftharpoons B$, then $K' = K^m$ for $mA \rightleftharpoons mB$. - **Dividing coefficients by $m$:** If $K$ is for $A \rightleftharpoons B$, then $K' = K^{1/m}$ for $\frac{1}{m}A \rightleftharpoons \frac{1}{m}B$. - **Adding reactions:** If $K_1$ for reaction 1 and $K_2$ for reaction 2, then $K_{overall} = K_1 K_2$ for (Reaction 1 + Reaction 2). #### Reaction Quotient ($Q$) - $Q$ has the same form as $K$ but uses non-equilibrium concentrations/pressures. - **Predicting reaction direction:** - If $Q K$: Net reaction proceeds in the reverse direction (to the left) to reach equilibrium. - If $Q = K$: The system is at equilibrium. #### Significance of $K$ Magnitude - **Large $K$ ($K \gg 1$):** Products are favored at equilibrium; reaction goes almost to completion. - **Small $K$ ($K \ll 1$):** Reactants are favored at equilibrium; reaction barely proceeds. - **Intermediate $K$ ($K \approx 1$):** Significant amounts of both reactants and products exist at equilibrium. ### Le Chatelier's Principle If a system at equilibrium is subjected to a change in concentration, temperature, pressure, or volume, the system will adjust itself to counteract the change and restore a new equilibrium. #### Effect of Concentration Change - **Adding reactant:** Equilibrium shifts to consume the added reactant (forward direction). - **Adding product:** Equilibrium shifts to consume the added product (reverse direction). - **Removing reactant:** Equilibrium shifts to produce more reactant (reverse direction). - **Removing product:** Equilibrium shifts to produce more product (forward direction). #### Effect of Pressure/Volume Change (for gaseous reactions) - **Increasing pressure (decreasing volume):** Equilibrium shifts to the side with fewer moles of gas. - **Decreasing pressure (increasing volume):** Equilibrium shifts to the side with more moles of gas. - **Note:** If $\Delta n = 0$, pressure/volume changes have no effect on the equilibrium position. #### Effect of Temperature Change - **Adding heat (increasing temperature):** - **Endothermic reaction ($\Delta H > 0$):** Equilibrium shifts in the forward direction (absorbs heat). $K$ increases. - **Exothermic reaction ($\Delta H 0$):** Equilibrium shifts in the reverse direction (releases heat). $K$ decreases. - **Exothermic reaction ($\Delta H 0$: Equilibrium shifts in the forward direction (to increase total moles). - If $\Delta n ### Thermodynamics of Chemical Equilibrium #### Gibbs Free Energy ($\Delta G$) - **Definition:** $\Delta G = \Delta H - T\Delta S$ - **Spontaneity:** - $\Delta G 0$: Non-spontaneous process (reverse reaction favored). - $\Delta G = 0$: System is at equilibrium. #### Relationship between $\Delta G$ and $K$ - **Standard Gibbs Free Energy Change ($\Delta G^\circ$):** $\Delta G^\circ = -RT \ln K$ - This relates the standard free energy change to the equilibrium constant. - $\Delta G^\circ$ refers to the free energy change when reactants in their standard states are converted to products in their standard states. - **Non-standard conditions:** $\Delta G = \Delta G^\circ + RT \ln Q$ - At equilibrium, $\Delta G = 0$ and $Q = K$, so $0 = \Delta G^\circ + RT \ln K \implies \Delta G^\circ = -RT \ln K$. #### Van't Hoff Equation Describes the temperature dependence of the equilibrium constant: $\ln \frac{K_2}{K_1} = -\frac{\Delta H^\circ}{R} \left( \frac{1}{T_2} - \frac{1}{T_1} \right)$ Or, in differential form: $\frac{d(\ln K)}{dT} = \frac{\Delta H^\circ}{RT^2}$ - **For endothermic reactions ($\Delta H^\circ > 0$):** Increasing $T$ increases $K$. - **For exothermic reactions ($\Delta H^\circ