Rotational Mechanics
Cheatsheet Content
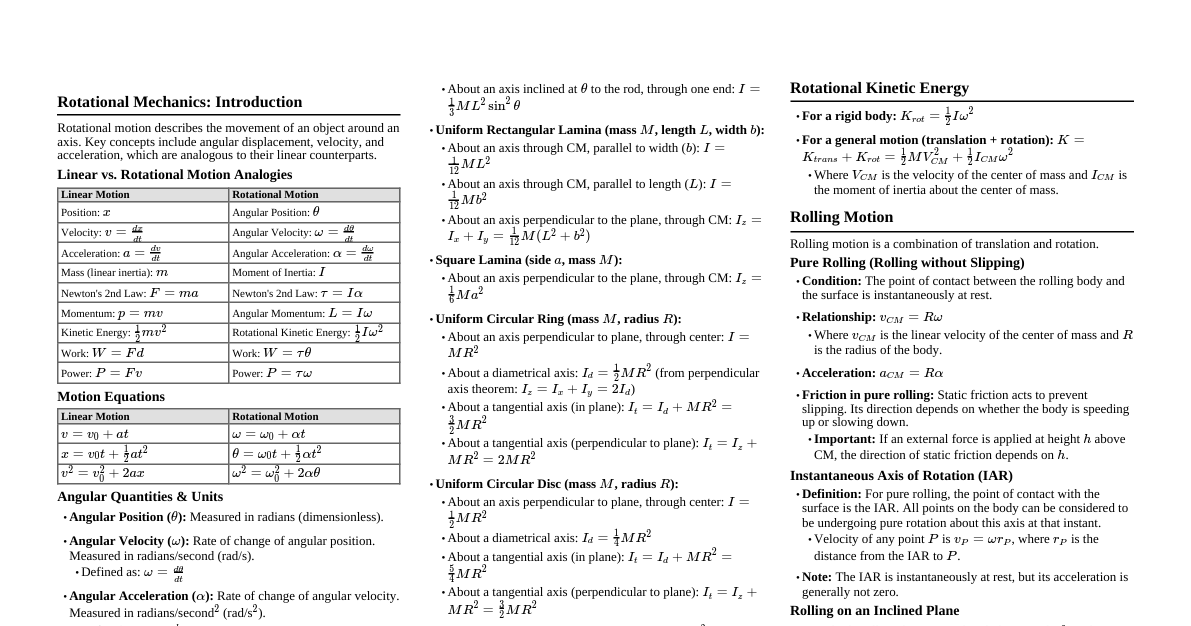
### 1. Rotational Kinematics - **Angular Position:** $\theta$ (radians). $2\pi$ rad = $360^\circ$. - **Angular Velocity:** $\omega = \frac{d\theta}{dt}$ (rad/s). Vector direction by right-hand rule. - **Angular Acceleration:** $\alpha = \frac{d\omega}{dt}$ (rad/s$^2$). - **Constant $\alpha$ Equations:** - $\omega_f = \omega_i + \alpha t$ - $\theta_f = \theta_i + \omega_i t + \frac{1}{2}\alpha t^2$ - $\omega_f^2 = \omega_i^2 + 2\alpha(\theta_f - \theta_i)$ - $\theta_f - \theta_i = \frac{1}{2}(\omega_i + \omega_f)t$ - **Linear-Angular Relation (for a point at radius $r$):** - $s = r\theta$ - $v_t = r\omega$ - $a_t = r\alpha$ - $a_c = v_t^2/r = r\omega^2$ (always towards center) - Total acceleration: $\vec{a} = \vec{a}_t + \vec{a}_c \implies a = \sqrt{a_t^2 + a_c^2}$ **JEE Shortcut:** If a wheel is connected to a block via a string over a pulley, $a_{block} = a_t = R\alpha_{pulley}$. ### 2. Rotational Dynamics - **Torque ($\vec{\tau}$):** $\vec{\tau} = \vec{r} \times \vec{F}$. Magnitude: $\tau = rF\sin\phi = rF_{\perp} = F r_{\perp}$ (N·m). - **Moment of Inertia ($I$):** Rotational inertia. (kg·m$^2$) - Point mass: $I = mr^2$ - Discrete masses: $I = \sum m_i r_i^2$ - Continuous body: $I = \int r^2 dm$ - **Parallel-Axis Theorem:** $I = I_{CM} + Md^2$. (For axis parallel to CM axis, distance $d$). - **Perpendicular-Axis Theorem (for planar objects):** $I_z = I_x + I_y$. (For a flat object in xy-plane, $I_z$ is about z-axis perpendicular to plane). - **Newton's Second Law for Rotation:** $\sum \vec{\tau} = I\vec{\alpha}$. - **Rotational Equilibrium:** $\sum \vec{\tau} = 0$. **JEE Shortcut (Moment of Inertia):** - For a uniform rod of length $L$ and mass $M$: - About center: $I = \frac{1}{12}ML^2$ - About one end: $I = \frac{1}{3}ML^2$ - For a thin circular ring/hoop of radius $R$ and mass $M$: - About central axis: $I = MR^2$ - About diameter: $I = \frac{1}{2}MR^2$ - For a uniform disc/solid cylinder of radius $R$ and mass $M$: - About central axis: $I = \frac{1}{2}MR^2$ - About diameter: $I = \frac{1}{4}MR^2$ - For a solid sphere of radius $R$ and mass $M$: - About diameter: $I = \frac{2}{5}MR^2$ - For a spherical shell of radius $R$ and mass $M$: - About diameter: $I = \frac{2}{3}MR^2$ ### 3. Rotational Energy - **Rotational Kinetic Energy:** $K_{rot} = \frac{1}{2}I\omega^2$ (Joules). - **Work Done by Torque:** $W = \int \tau d\theta$. For constant $\tau$, $W = \tau \Delta\theta$. - **Power:** $P = \tau\omega$ (Watts). - **Work-Energy Theorem (Rotation):** $W_{net} = \Delta K_{rot}$. - **Total Kinetic Energy (Rolling without slipping):** - $K_{total} = K_{trans} + K_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$. - Since $v_{CM} = R\omega$: $K_{total} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\left(\frac{v_{CM}}{R}\right)^2 = \frac{1}{2}v_{CM}^2 \left(M + \frac{I_{CM}}{R^2}\right)$. **JEE Shortcut (Rolling Kinetic Energy):** - The fraction of total kinetic energy that is rotational is $\frac{K_{rot}}{K_{total}} = \frac{I_{CM}}{MR^2 + I_{CM}}$. - The fraction that is translational is $\frac{K_{trans}}{K_{total}} = \frac{MR^2}{MR^2 + I_{CM}}$. - Define $k^2 = I_{CM}/M$. Then $K_{total} = \frac{1}{2}Mv_{CM}^2 (1 + k^2/R^2)$. ### 4. Angular Momentum - **Point particle:** $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times m\vec{v}$. Magnitude: $L = rmv\sin\phi$. - **Rigid body:** $\vec{L} = I\vec{\omega}$. - **Newton's 2nd Law (Angular Momentum):** $\sum \vec{\tau}_{ext} = \frac{d\vec{L}}{dt}$. - **Conservation of Angular Momentum:** If $\sum \vec{\tau}_{ext} = 0$, then $\vec{L}_{initial} = \vec{L}_{final}$. - $I_1\omega_1 = I_2\omega_2$. **JEE Shortcut (Conservation of Angular Momentum):** - When a mass moves towards/away from the axis of rotation, its $I$ changes, hence $\omega$ changes. - Example: Person walking from edge to center of rotating platform. $I_{sys} = I_{platform} + I_{person}$. As $r_{person}$ decreases, $I_{person}$ decreases, so $I_{sys}$ decreases and $\omega$ increases. ### 5. Rolling Motion (without slipping) - **Conditions:** $v_{CM} = R\omega$ and $a_{CM} = R\alpha$. - **Friction:** Static friction ($f_s$) is essential for rolling without slipping. It does no work. - **Shortcut for Inclined Plane (JEE Main/Advanced):** - For an object rolling down an incline (angle $\theta$) without slipping: - Translational acceleration of CM: $a_{CM} = \frac{g \sin\theta}{1 + I_{CM}/(MR^2)}$. - Static friction force: $f_s = \frac{Mg \sin\theta}{1 + MR^2/I_{CM}}$. - The object with the smallest value of $I_{CM}/(MR^2)$ will have the largest acceleration and reach the bottom first. - Solid Sphere ($I = \frac{2}{5}MR^2$): $I/(MR^2) = 2/5$. $a_{CM} = \frac{g \sin\theta}{1 + 2/5} = \frac{5}{7}g \sin\theta$. - Solid Cylinder/Disc ($I = \frac{1}{2}MR^2$): $I/(MR^2) = 1/2$. $a_{CM} = \frac{g \sin\theta}{1 + 1/2} = \frac{2}{3}g \sin\theta$. - Hollow Sphere/Spherical Shell ($I = \frac{2}{3}MR^2$): $I/(MR^2) = 2/3$. $a_{CM} = \frac{g \sin\theta}{1 + 2/3} = \frac{3}{5}g \sin\theta$. - Ring/Hoop ($I = MR^2$): $I/(MR^2) = 1$. $a_{CM} = \frac{g \sin\theta}{1 + 1} = \frac{1}{2}g \sin\theta$. - Order of finishing race: Solid Sphere > Solid Cylinder > Hollow Sphere > Ring. ### 6. Vector Form & Right-Hand Rule - **Cross Product:** $\vec{A} \times \vec{B}$ direction by RHR. - **Angular Velocity ($\vec{\omega}$):** RHR along axis of rotation. - **Angular Acceleration ($\vec{\alpha}$):** Same direction as $\vec{\omega}$ if speeding up, opposite if slowing down. - **Torque ($\vec{\tau}$):** Direction by $\vec{r} \times \vec{F}$ using RHR. - **Angular Momentum ($\vec{L}$):** Direction by $\vec{r} \times \vec{p}$ or $I\vec{\omega}$ using RHR. ### 7. Gyroscopes and Precession - **Precession:** The slow conical motion of the axis of a spinning body under an external torque. - **Precessional Angular Velocity ($\vec{\Omega}$):** - Magnitude: $\Omega = \frac{\tau_{ext}}{L} = \frac{mgr}{I\omega_{spin}}$. - $\textit{mgr}$ is the torque due to gravity about the pivot. - $I\omega_{spin}$ is the angular momentum due to spin. - **Direction:** The precession direction is perpendicular to both $\vec{L}$ and $\vec{\tau}_{ext}$. ### 8. Rotational-Translational Analogy | Translational Quantity | Rotational Quantity | | :--------------------- | :------------------ | | Position ($x$) | Angular Position ($\theta$) | | Velocity ($v$) | Angular Velocity ($\omega$) | | Acceleration ($a$) | Angular Acceleration ($\alpha$) | | Mass ($m$) | Moment of Inertia ($I$) | | Force ($\vec{F}$) | Torque ($\vec{\tau}$) | | Momentum ($\vec{p} = m\vec{v}$) | Angular Momentum ($\vec{L} = I\vec{\omega}$) | | Kinetic Energy ($K = \frac{1}{2}mv^2$) | Rotational Kinetic Energy ($K_{rot} = \frac{1}{2}I\omega^2$) | | Newton's 2nd Law ($\sum \vec{F} = m\vec{a}$) | Newton's 2nd Law ($\sum \vec{\tau} = I\vec{\alpha}$) | | Work ($W = \int F dx$) | Work ($W = \int \tau d\theta$) | | Power ($P = Fv$) | Power ($P = \tau\omega$) | ### 9. Angular Impulse - **Angular Impulse:** The change in angular momentum. - $\vec{J}_{angular} = \int \vec{\tau} dt = \Delta \vec{L} = \vec{L}_f - \vec{L}_i$. - Units: N·m·s or kg·m$^2$/s. ### 10. Advanced Problem Solving Tips (JEE Advanced) - **Combined Translation + Rotation:** - Use $\sum F_{ext} = Ma_{CM}$ for translational motion of CM. - Use $\sum \tau_{ext, CM} = I_{CM}\alpha$ for rotational motion about CM (even if CM accelerates). - Or, choose a fixed axis (if one exists) and use $\sum \tau_{ext, fixed} = I_{fixed}\alpha$. - **Energy Conservation with Rolling:** - If no slipping and no non-conservative forces, total mechanical energy is conserved: $K_{initial} + U_{initial} = K_{final} + U_{final}$. - $K = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$. - $U = Mgh_{CM}$. - **Impulse-Momentum Theorem for Collisions:** - If a particle collides with a rigid body, apply conservation of angular momentum about the point of impact or a suitable pivot if no external torque is generated. - If collision is instantaneous, linear momentum may or may not be conserved, but angular momentum about the point of impact is often conserved. - **Rolling with Slipping:** - If slipping occurs, $v_{CM} \neq R\omega$. Kinetic friction $f_k = \mu_k N$ acts. - Apply $\sum F_x = Ma_{CM}$ and $\sum \tau_{CM} = I_{CM}\alpha$ separately using $f_k$. - Slipping stops when $v_{CM} = R\omega$. - **Instantaneous Axis of Rotation (IAR):** - For pure rolling, the point of contact with the ground is the IAR. - At IAR, velocity is zero. - $K_{total} = \frac{1}{2}I_{IAR}\omega^2$. - $I_{IAR} = I_{CM} + MR^2$ (by parallel axis theorem). This simplifies calculations for $K_{total}$.