Classical Mechanics Formulas
Cheatsheet Content
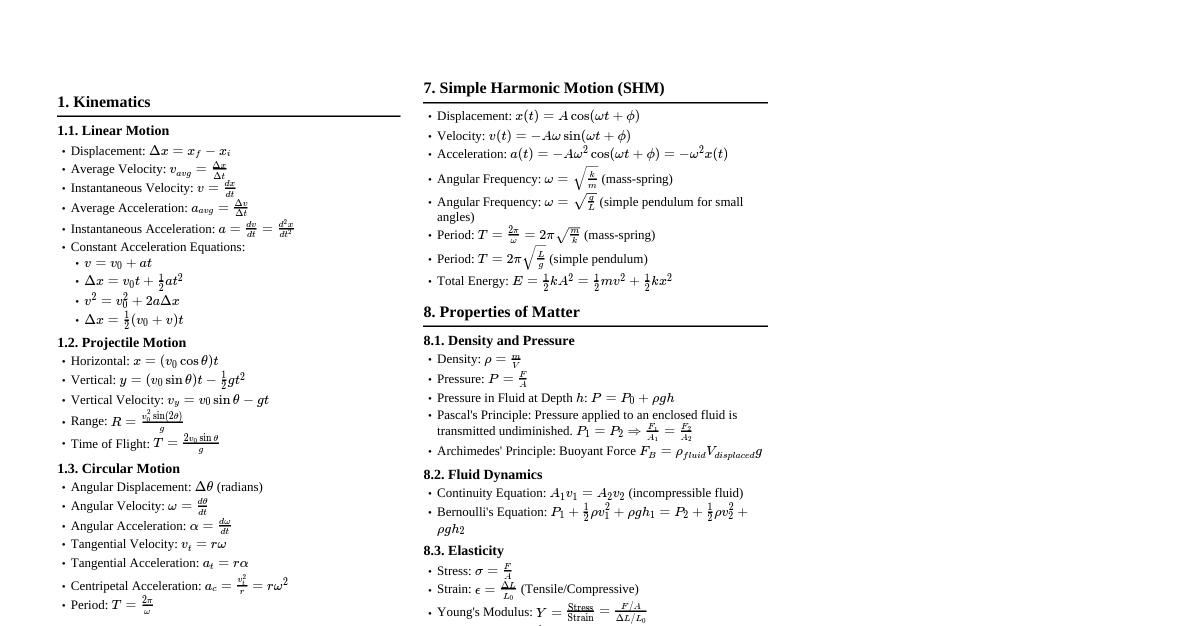
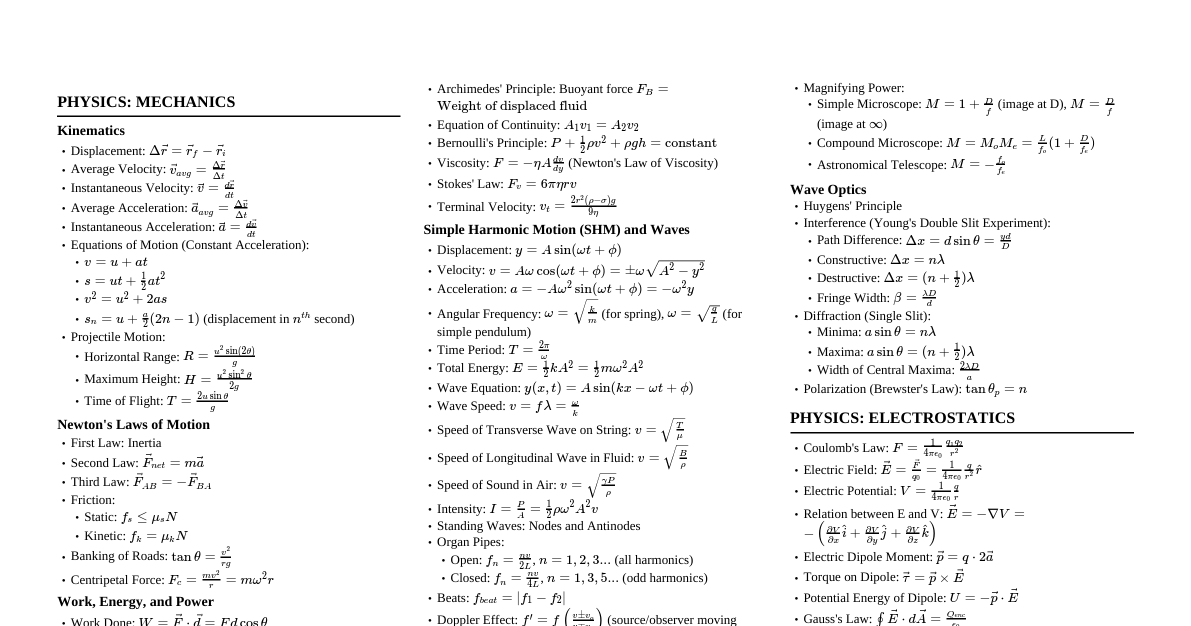
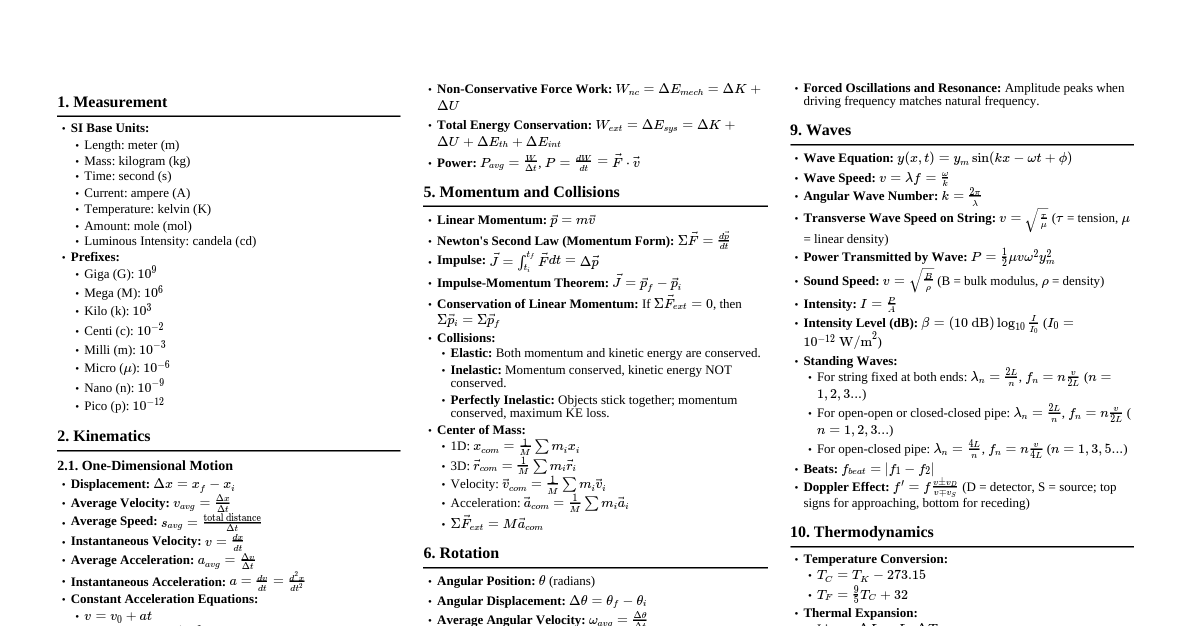
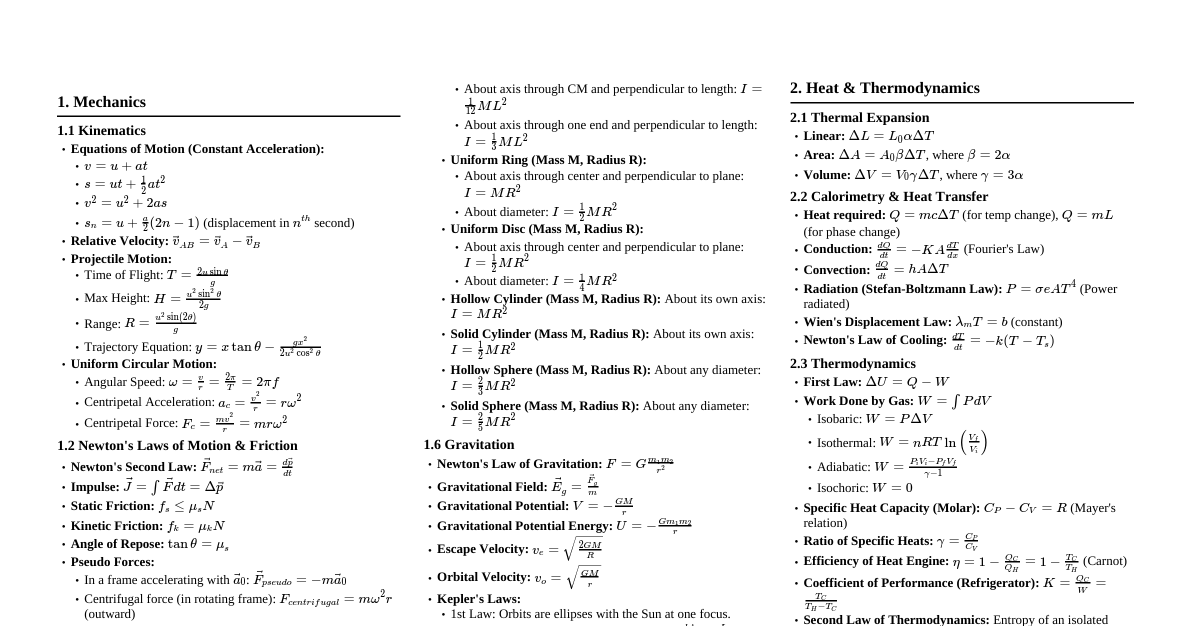
1. Problem Solving Strategies Draw a diagram & label quantities. Solve symbolically first, then plug in numbers. Check units/dimensions. Check limiting/special cases. Check order of magnitude for numerical answers. 2. Kinematics Projectile Motion (constant $g$, no air resistance) Position: Horizontal: $x(t) = x_0 + v_{x0}t$ Use: Predicts horizontal position over time. Example: A ball kicked with $v_{x0}=10$ m/s from $x_0=0$ will be at $x(2s) = 0 + 10(2) = 20$ m. Drawback: Assumes no air resistance, constant horizontal velocity. Vertical: $y(t) = y_0 + v_{y0}t - \frac{1}{2}gt^2$ Use: Predicts vertical position over time. Example: A ball thrown upwards with $v_{y0}=15$ m/s from $y_0=0$ at $t=1$s will be at $y(1s) = 0 + 15(1) - 0.5(9.8)(1)^2 = 10.1$ m. Drawback: Assumes constant downward acceleration $g$, no air resistance. Velocity: Horizontal: $v_x(t) = v_{x0}$ Use: Horizontal velocity remains constant. Drawback: Only valid without air resistance. Vertical: $v_y(t) = v_{y0} - gt$ Use: Predicts vertical velocity over time. Example: For $v_{y0}=15$ m/s at $t=1$s, $v_y(1s) = 15 - 9.8(1) = 5.2$ m/s. Drawback: Assumes constant $g$, no air resistance. Maximum horizontal distance (for given initial speed $V$ on level ground): $d_{max} = \frac{V^2}{g}$ at $\theta = 45^\circ$ Use: Quick estimation of maximum range for optimal launch angle. Example: A cannonball fired at $V=100$ m/s has $d_{max} = (100)^2/9.8 \approx 1020$ m. Drawback: Idealized, ignores air resistance, only for launch and land at same height. Motion in a Plane (Polar Coordinates) Position vector: $\vec{r} = r\hat{r}$ Use: Describes position in a plane using distance from origin ($r$) and angle ($\theta$). Useful for central forces or circular motion. Velocity: $\vec{v} = \dot{r}\hat{r} + r\dot{\theta}\hat{\theta}$ Use: Decomposes velocity into radial ($\dot{r}$) and tangential ($r\dot{\theta}$) components. Example: For circular motion, $r$ is constant so $\dot{r}=0$, giving $\vec{v} = r\dot{\theta}\hat{\theta}$. Drawback: Requires knowledge of $r(t)$ and $\theta(t)$. Acceleration: $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\hat{r} + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{\theta}$ Use: Decomposes acceleration into radial and tangential components. Particularly useful for non-uniform circular motion or spiral paths. The $-r\dot{\theta}^2$ term is the centripetal acceleration. Example: For uniform circular motion, $\dot{r}=\ddot{r}=\ddot{\theta}=0$, so $\vec{a} = -r\dot{\theta}^2\hat{r}$ (pure centripetal). Newton's Second Law: Radial: $F_r = m(\ddot{r} - r\dot{\theta}^2)$ Tangential: $F_\theta = m(r\ddot{\theta} + 2\dot{r}\dot{\theta})$ Use: Relates applied forces to components of acceleration in polar coordinates. Drawback: Can be complex to apply if forces are not naturally aligned with $\hat{r}$ and $\hat{\theta}$. 3. Newton's Laws First Law: A body moves with constant velocity unless acted on by a force (defines inertial frame). Use: Identifies inertial reference frames where Newton's second law is valid. Drawback: Does not hold in non-inertial (accelerating) frames without introducing fictitious forces. Second Law: $\vec{F} = \frac{d\vec{p}}{dt} = m\vec{a}$ (if mass $m$ is constant). Use: The fundamental equation of motion. Relates net force to change in momentum or acceleration. Example: A 1 kg object with a net force of 10 N experiences an acceleration of $10 \text{ m/s}^2$. Drawback: Only valid in inertial frames. For variable mass systems (like rockets), use $\vec{F} = \frac{d\vec{p}}{dt}$. Third Law: For every force on one body, there is an equal and opposite force on another ($\vec{F}_{AB} = -\vec{F}_{BA}$). Use: Crucial for analyzing interactions between multiple objects, identifying action-reaction pairs, and understanding internal forces in a system. Example: When you push a wall, the wall pushes back on you with the same magnitude of force. Drawback: Action-reaction pairs act on *different* bodies, so they don't cancel out when considering the motion of a single object. 4. Forces Gravity: $F = \frac{GMm}{r^2}$ (magnitude of force between two masses $M, m$ separated by $r$). Use: Calculates gravitational force between any two objects, e.g., planets, stars. Example: Force between Earth and Moon. Drawback: Only valid for point masses or spherically symmetric objects. Inverse square law. Near Earth's surface: $F = mg$ where $g = \frac{GM_E}{R_E^2} \approx 9.8 \text{ m/s}^2$. Use: Simplification for objects close to Earth's surface. Example: Weight of a 5 kg object is $5 \times 9.8 = 49$ N. Drawback: Approximation, $g$ varies slightly with altitude and location on Earth. Spring Force (Hooke's Law): $F = -kx$ (restoring force, $x$ is displacement from equilibrium). Use: Models elastic deformation of springs, wires, etc. Example: A spring with $k=100$ N/m stretched by 0.1 m exerts a force of $100 \times 0.1 = 10$ N. Drawback: Valid only for small deformations (within elastic limit). Static Friction: $F_s \le \mu_s N$ (opposes impending motion). Use: Determines the maximum force that can be applied before an object starts to slide. Example: A 10 kg block (N=98N) on a surface with $\mu_s=0.5$ can resist a horizontal force up to $0.5 \times 98 = 49$ N. Drawback: $\mu_s$ is an empirical coefficient, depends on surfaces. Inequality means $F_s$ adjusts to match applied force up to limit. Kinetic Friction: $F_k = \mu_k N$ (opposes motion, direction opposite to velocity). Use: Calculates friction force when an object is sliding. Example: If the 10 kg block from above is sliding and $\mu_k=0.3$, $F_k = 0.3 \times 98 = 29.4$ N. Drawback: $\mu_k$ is an empirical coefficient, generally less than $\mu_s$. Assumes constant value regardless of speed. Tension: Force exerted by a rope or string when pulled. Use: Analyzes systems with ropes, pulleys, etc. Drawback: Assumes ideal ropes (massless, inextensible) unless specified. Normal Force: Force perpendicular to a surface, preventing penetration. Use: Always present when objects are in contact with a surface. Often equals $mg$ on a horizontal surface, but changes on inclines or with vertical external forces. Example: A book on a table experiences an upward normal force equal to its weight. Drawback: Its magnitude is determined by other forces, not an independent fundamental force. 5. Work, Energy, and Power Work Done by a Constant Force: $W = \vec{F} \cdot \Delta\vec{r} = F \Delta r \cos\theta$ Use: Calculates energy transferred by a constant force. Example: Pushing a 10 N box 5 m with force parallel to displacement: $W = 10 \times 5 = 50$ J. Drawback: Only for constant force and straight-line displacement. Work Done by a Variable Force: $W = \int \vec{F} \cdot d\vec{r}$ Use: General definition of work, applicable to forces that change in magnitude or direction, or along curved paths. Example: Work done by a spring: $\int_0^x (-kx')dx' = -\frac{1}{2}kx^2$. Drawback: Requires integration, can be complex if $\vec{F}$ or path are complicated. Kinetic Energy: $K = \frac{1}{2}mv^2$ Use: Energy associated with motion. Example: A 2 kg object moving at 5 m/s has $K = 0.5 \times 2 \times 5^2 = 25$ J. Drawback: Only for non-relativistic speeds. Work-Energy Theorem: $W_{net} = \Delta K$ Use: Relates the net work done on an object to its change in kinetic energy. Very powerful for problems involving forces and changes in speed. Example: If 50 J of net work is done on the 2 kg object, its kinetic energy increases by 50 J. Drawback: Only considers kinetic energy; doesn't account for potential energy or heat unless included in $W_{net}$. Potential Energy: Gravity (near Earth): $U_g = mgh$ Use: Energy stored due to height in a uniform gravitational field. Example: A 1 kg object raised 10 m gains $1 \times 9.8 \times 10 = 98$ J of potential energy. Drawback: Only valid near Earth's surface and for relatively small height changes. Reference point for $h$ is arbitrary. Gravity (general): $U_g = -\frac{GMm}{r}$ Use: General gravitational potential energy, valid for any two masses. Zero at infinite separation. Drawback: Can be confusing due to negative sign (it's a binding energy). Spring: $U_s = \frac{1}{2}kx^2$ Use: Energy stored in a stretched or compressed spring. Example: A spring with $k=100$ N/m compressed by 0.1 m stores $0.5 \times 100 \times (0.1)^2 = 0.5$ J. Drawback: Valid only for ideal springs (Hooke's Law). Conservation of Mechanical Energy: $K_1 + U_1 = K_2 + U_2$ (if only conservative forces do work). Use: Simplifies many problems by relating initial and final states without analyzing forces over time. Example: A pendulum swinging: $mgh_{top} = 0.5mv_{bottom}^2$. Drawback: Not valid if non-conservative forces (like friction or air resistance) do work. If they do, $W_{nc} = \Delta E_{mech}$. Power: $P = \frac{dW}{dt} = \vec{F} \cdot \vec{v}$ Use: Rate at which work is done or energy is transferred. Example: A 100 N force pushing an object at 2 m/s in the same direction: $P = 100 \times 2 = 200$ W. Drawback: Instantaneous power. Average power is $W/\Delta t$. 6. Momentum and Collisions Linear Momentum: $\vec{p} = m\vec{v}$ Use: A measure of "quantity of motion", important for collisions and impulses. Drawback: Only for non-relativistic speeds. Impulse: $\vec{J} = \int \vec{F} dt = \Delta\vec{p}$ Use: Relates force applied over time to change in momentum. Useful when force is not constant or interaction time is short. Example: A bat hitting a ball. The average force can be found if the change in momentum and contact time are known. Drawback: Requires knowledge of the force function or average force over time. Conservation of Linear Momentum: $\sum \vec{p}_{initial} = \sum \vec{p}_{final}$ (if net external force is zero). Use: Extremely powerful for analyzing collisions and explosions where internal forces are large but external forces are negligible over the interaction time. Example: Two carts colliding on a frictionless track. Drawback: Only valid if the net external force on the system is zero. If external forces are present, momentum is not conserved. Elastic Collision: Both momentum and kinetic energy are conserved. Use: Idealized collision where no energy is lost to heat, sound, or deformation. Allows for exact calculation of final velocities. Drawback: Rare in macroscopic systems; often an approximation. Inelastic Collision: Momentum is conserved, kinetic energy is not (some converted to other forms). Use: Realistic model for most everyday collisions. Drawback: Cannot predict final velocities uniquely without additional information (e.g., coefficient of restitution). Perfectly Inelastic: Objects stick together, maximum kinetic energy lost. Use: Simplest type of inelastic collision, easy to calculate final common velocity. Example: A bullet embedding in a block. Center of Mass: $\vec{R}_{CM} = \frac{\sum m_i \vec{r}_i}{\sum m_i}$ Use: Represents the average position of the mass in a system. The system's total momentum is $M_{total}\vec{V}_{CM}$. Drawback: Calculation can be involved for continuous mass distributions (requires integration). Velocity of Center of Mass: $\vec{V}_{CM} = \frac{\sum m_i \vec{v}_i}{\sum m_i}$ (constant if net external force is zero). Use: The center of mass moves as if all external forces acted on it and all mass were concentrated there. Example: In an explosion, fragments fly apart, but the CM continues along its original path. 7. Rotational Motion Angular Position: $\theta$ (radians) Use: Describes orientation of a rotating object. Drawback: Radians are crucial; degrees will give incorrect results in formulas. Angular Velocity: $\omega = \frac{d\theta}{dt}$ Use: Rate of change of angular position. Angular Acceleration: $\alpha = \frac{d\omega}{dt}$ Use: Rate of change of angular velocity. Relationship to Linear: $v = r\omega$, $a_t = r\alpha$, $a_c = r\omega^2$ Use: Connects linear motion of a point on a rotating object to its angular motion. Example: A point 0.5 m from the center of a spinning wheel with $\omega=10$ rad/s has a linear speed $v = 0.5 \times 10 = 5$ m/s. Drawback: $r$ is the perpendicular distance from the axis of rotation. Moment of Inertia: $I = \sum m_i r_i^2$ (discrete), $I = \int r^2 dm$ (continuous). Use: Rotational equivalent of mass; measures resistance to angular acceleration. Depends on mass distribution and axis of rotation. Example: For a solid cylinder of mass $M$ and radius $R$ about its central axis, $I = \frac{1}{2}MR^2$. Drawback: Calculation can be complex for irregular shapes or axes. Parallel Axis Theorem: $I = I_{CM} + Md^2$ ($I$ about parallel axis, $I_{CM}$ about CM, $d$ distance between axes). Use: Simplifies calculation of moment of inertia about an axis parallel to one passing through the center of mass. Example: For a rod of length $L$ about its end: $I = \frac{1}{12}ML^2 + M(\frac{L}{2})^2 = \frac{1}{3}ML^2$. Drawback: Requires knowing $I_{CM}$. Torque: $\vec{\tau} = \vec{r} \times \vec{F}$ (vector), $\tau = rF\sin\theta$ (magnitude). Use: Rotational equivalent of force; causes angular acceleration. Example: Applying a 10 N force at 0.2 m from a pivot, perpendicular to the lever arm, creates a torque of $10 \times 0.2 = 2$ Nm. Drawback: Vector cross product can be tricky; need to correctly identify $\vec{r}$ (moment arm) and $\vec{F}$. Newton's Second Law for Rotation: $\vec{\tau}_{net} = \frac{d\vec{L}}{dt} = I\vec{\alpha}$ (if $I$ is constant). Use: Relates net torque to angular acceleration. Example: A net torque of 5 Nm on an object with $I=2$ kg m$^2$ results in $\alpha = 5/2 = 2.5$ rad/s$^2$. Drawback: Only applies if the moment of inertia $I$ is constant. For variable $I$ (e.g., a figure skater pulling in arms), use $\vec{\tau}_{net} = \frac{d\vec{L}}{dt}$. Angular Momentum: $\vec{L} = \vec{r} \times \vec{p} = I\vec{\omega}$ (for rigid body). Use: Rotational equivalent of linear momentum. Drawback: Vector cross product for point particles, or $I\omega$ for rigid bodies. Conservation of Angular Momentum: $\sum \vec{L}_{initial} = \sum \vec{L}_{final}$ (if net external torque is zero). Use: Powerful for systems where external torques are negligible, especially in isolated systems or during short interactions. Example: A spinning ice skater pulling in her arms decreases her moment of inertia, so her angular velocity must increase to conserve $L$. Drawback: Only valid if net external torque is zero. Rotational Kinetic Energy: $K_{rot} = \frac{1}{2}I\omega^2$. Use: Energy due to rotation. Total kinetic energy for rolling objects is $K_{total} = K_{trans} + K_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$. Drawback: Only for non-relativistic speeds. 8. Oscillations Simple Harmonic Motion (SHM) Equation of motion: $\ddot{x} + \omega^2 x = 0$ Use: Describes ideal oscillations where restoring force is proportional to displacement. Drawback: Idealized; no damping, no driving force. Angular frequency: $\omega = \sqrt{\frac{k}{m}}$ (spring-mass), $\omega = \sqrt{\frac{g}{L}}$ (pendulum, small angle) Use: Determines how fast an oscillation occurs. Drawback: Pendulum formula only for small angles ($\sin\theta \approx \theta$). Period: $T = \frac{2\pi}{\omega}$ Use: Time for one complete oscillation. Solution: $x(t) = A\cos(\omega t + \phi)$ Use: Gives position as a function of time. $A$ is amplitude, $\phi$ is phase constant determined by initial conditions. Damped Harmonic Motion Equation of motion: $\ddot{x} + 2\gamma\dot{x} + \omega_0^2 x = 0$ (where $2\gamma = b/m$, $\omega_0^2 = k/m$) Use: Models oscillations where energy is gradually lost (e.g., due to air resistance or internal friction). Drawback: Assumes damping force proportional to velocity. Solutions: Underdamped ($\gamma Use: Oscillations with decreasing amplitude. Critically Damped ($\gamma = \omega_0$): $x(t) = (A + Bt)e^{-\gamma t}$ Use: Fastest return to equilibrium without oscillation. Important for shock absorbers, door closers. Overdamped ($\gamma > \omega_0$): $x(t) = Ae^{-(\gamma - \Omega)t} + Be^{-(\gamma + \Omega)t}$, where $\Omega = \sqrt{\gamma^2 - \omega_0^2}$ Use: Slow return to equilibrium without oscillation, slower than critically damped. Driven Harmonic Motion Equation of motion: $\ddot{x} + 2\gamma\dot{x} + \omega_0^2 x = F_0\cos(\omega_d t)$ Use: Models systems subjected to an external periodic force. Particular Solution (steady state): $x_p(t) = A\cos(\omega_d t - \phi)$ Use: Describes the long-term behavior of the system after transient effects die out. Amplitude: $A = \frac{F_0}{\sqrt{(\omega_0^2 - \omega_d^2)^2 + (2\gamma\omega_d)^2}}$ Use: Predicts the amplitude of the steady-state oscillation. Phase: $\tan\phi = \frac{2\gamma\omega_d}{\omega_0^2 - \omega_d^2}$ Use: Describes the phase difference between the driving force and the system's response. Resonance: Occurs when $\omega_d \approx \omega_0$ (for weak damping). Amplitude is maximized. Use: Explains phenomena like shattering glass with sound or the Tacoma Narrows Bridge collapse. Drawback: Can lead to destructive oscillations if not accounted for in design. 9. Lagrangian Mechanics Lagrangian: $L = K - U$ Use: Alternative formulation of classical mechanics, often simpler for complex systems or systems with constraints. Drawback: Requires identifying kinetic and potential energies in terms of generalized coordinates. Euler-Lagrange Equation: $\frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}}\right) - \frac{\partial L}{\partial q} = 0$ (for each generalized coordinate $q$). Use: Derives the equations of motion for a system using the Lagrangian. Example: For a simple pendulum, choosing $q=\theta$ leads to the pendulum's equation of motion. Drawback: Partial derivatives and time derivatives can be tedious. Generalized Momentum: $p_q = \frac{\partial L}{\partial \dot{q}}$ Use: The momentum conjugate to a generalized coordinate $q$. Cyclic Coordinate: If $q$ is not explicitly in $L$ (i.e., $\frac{\partial L}{\partial q} = 0$), then $p_q$ is conserved. Use: Powerful tool for identifying conserved quantities (integrals of motion) in a system. Example: For a central force problem, the angle $\theta$ is cyclic, implying conservation of angular momentum. Energy Conservation: If $L$ has no explicit time dependence (i.e., $\frac{\partial L}{\partial t} = 0$), then energy $E = \sum_i \dot{q}_i \frac{\partial L}{\partial \dot{q}_i} - L$ is conserved. Use: Provides a general condition for energy conservation in terms of the Lagrangian. Drawback: This expression for energy is equivalent to $H$ (Hamiltonian) when constraints are time-independent. 10. Non-Inertial Frames Transforming Acceleration: $\vec{a}_{inertial} = \vec{a}_{rot} + \vec{a}_0 + \vec{\omega} \times (\vec{\omega} \times \vec{r}) + 2\vec{\omega} \times \vec{v}_{rot} + \dot{\vec{\omega}} \times \vec{r}$ Use: Relates acceleration in a rotating/accelerating frame ($\vec{a}_{rot}$) to acceleration in an inertial frame ($\vec{a}_{inertial}$). Drawback: Very complex formula, requires careful vector algebra. Fictitious Forces (in rotating frame): Translational: $\vec{F}_{trans} = -m\vec{a}_0$ (if origin accelerates with $\vec{a}_0$) Use: Explains why you feel pushed back in an accelerating car. Centrifugal: $\vec{F}_{cent} = -m\vec{\omega} \times (\vec{\omega} \times \vec{r})$ (points outward) Use: Explains why you feel pushed to the outside when turning a corner in a car. Drawback: Not a real force, but a consequence of viewing motion from a rotating frame. Coriolis: $\vec{F}_{cor} = -2m\vec{\omega} \times \vec{v}_{rot}$ (perpendicular to velocity) Use: Explains deflection of objects moving on Earth (e.g., hurricanes, long-range projectiles). Example: Explains why Foucault's pendulum appears to rotate. Drawback: Often counter-intuitive, only significant for large-scale or long-duration motions. Azimuthal: $\vec{F}_{azim} = -m\dot{\vec{\omega}} \times \vec{r}$ (if angular velocity changes) Use: Accounts for forces due to changes in the rotation rate of the non-inertial frame. 11. Special Relativity (Kinematics) Lorentz Factor: $\gamma = \frac{1}{\sqrt{1 - v^2/c^2}}$ Use: Quantifies relativistic effects. $\gamma \ge 1$, approaches 1 at low speeds, infinity as $v \to c$. Time Dilation: $\Delta t = \gamma \Delta t_0$ ($\Delta t_0$ is proper time in rest frame). Use: Time intervals are longer in frames moving relative to the event. Example: Muons created in the upper atmosphere live longer in Earth's frame than their proper lifetime. Drawback: "Proper time" must be correctly identified as the time measured in the frame where the event occurs at the same spatial location. Length Contraction: $L = L_0/\gamma$ ($L_0$ is proper length in rest frame, $L$ is length in direction of motion). Use: Lengths are shorter in the direction of motion for objects moving relative to the observer. Drawback: Only applies to length parallel to the direction of relative motion. Lorentz Transformations: $x' = \gamma(x - vt)$ $t' = \gamma(t - vx/c^2)$ $y' = y$, $z' = z$ Use: Relates spacetime coordinates between two inertial frames moving at constant relative velocity $v$. Drawback: Can be complex to apply; requires careful choice of coordinate systems. Velocity Addition: $u_x = \frac{u_x' + v}{1 + u_x'v/c^2}$ (parallel), $u_y = \frac{u_y'}{\gamma(1 + u_x'v/c^2)}$ (perpendicular). Use: Correctly combines velocities in special relativity (unlike Galilean addition $u_x = u_x' + v$). Ensures no speed exceeds $c$. Example: If you throw a ball forward at 0.5c on a spaceship moving at 0.5c, an outside observer sees the ball moving at $0.8c$, not $1.0c$. Invariant Interval: $(\Delta s)^2 = (c\Delta t)^2 - (\Delta x)^2 - (\Delta y)^2 - (\Delta z)^2$ (frame-independent). Use: A quantity that all inertial observers agree on. Classifies spacetime events as time-like, space-like, or light-like. 12. Special Relativity (Dynamics) Relativistic Momentum: $\vec{p} = \gamma m\vec{v}$ Use: Correct definition of momentum at relativistic speeds. As $v \to c$, momentum approaches infinity, requiring infinite force to accelerate further. Relativistic Energy: $E = \gamma mc^2$ Use: Total energy of a particle, including its rest energy and kinetic energy. Mass-Energy Equivalence: $E_0 = mc^2$ (rest energy) Use: Famous equation showing that mass is a form of energy. Energy can be converted to mass and vice versa. Example: Nuclear reactions convert a small amount of mass into a large amount of energy. Energy-Momentum Relation: $E^2 = (pc)^2 + (mc^2)^2$ Use: Unified relationship between energy, momentum, and rest mass. For massless particles (e.g., photons), $m=0$, so $E=pc$. Relativistic Force: $\vec{F} = \frac{d\vec{p}}{dt}$ (Newton's 2nd Law still holds with relativistic momentum). Use: Defines force in special relativity. Note that $\vec{F} \ne m\vec{a}$ at high speeds, as mass effectively depends on velocity. Rocket Equation: $\Delta v = u \ln(M_0/M_f)$ (non-relativistic), $\Delta v = c \tanh(u/c \ln(M_0/M_f))$ (relativistic, for $u$ relative exhaust speed) Use: Calculates the change in velocity of a rocket based on its exhaust speed and mass ratio. Drawback: Relativistic version is more complex but necessary for high-speed interstellar travel concepts. 13. 4-Vectors Position 4-Vector: $X^\mu = (ct, x, y, z)$ Use: Combines space and time into a single entity in spacetime. Velocity 4-Vector: $U^\mu = (\gamma c, \gamma \vec{v})$ Use: Provides a relativistic definition of velocity that transforms simply under Lorentz transformations. Momentum 4-Vector: $P^\mu = (E/c, \vec{p})$ Use: Unifies energy and momentum into a single 4-vector. Conservation of $P^\mu$ implies conservation of both energy and momentum. Force 4-Vector: $F^\mu = (\gamma/c \frac{dE}{dt}, \gamma \vec{F})$ Use: Relativistic generalization of force. Inner Product (Minkowski Metric): $A \cdot B = A_0B_0 - A_1B_1 - A_2B_2 - A_3B_3$ (invariant). Use: A scalar product in Minkowski spacetime that is invariant under Lorentz transformations. Drawback: The metric signature (e.g., $+---$ or $-+++$) must be consistent. Norm of Momentum 4-Vector: $P \cdot P = (E/c)^2 - |\vec{p}|^2 = m^2c^2$ (invariant, $m$ is rest mass). Use: Proves that rest mass is a relativistic invariant. 14. General Relativity Equivalence Principle: Locally, gravity is indistinguishable from acceleration. Use: Fundamental postulate of GR. Implies that free-falling frames are locally inertial. Drawback: "Locally" is key; tidal forces show that gravity is not perfectly uniform over large regions. Gravitational Time Dilation: Clocks run slower in stronger gravitational fields. $\Delta t = \Delta t_0 (1 + \frac{gh}{c^2})$ (approximate for weak fields). Use: Explains why clocks on GPS satellites run faster than clocks on Earth, requiring correction. Drawback: The approximate formula is only for weak, static gravitational fields. Full GR requires metric tensors. Maximal Proper Time Principle: Particles under gravity follow paths that maximize proper time. Use: An action principle for general relativity, analogous to minimizing action in classical mechanics. Drawback: Requires understanding of proper time and variational calculus in curved spacetime. Tidal Forces: Differential gravitational forces across an object. Example: Longitudinal tidal force $\approx \frac{2GMm x}{R^3}$. Use: Explains stretching and squeezing effects of gravity (e.g., Earth's tides, spaghettification near black holes). Drawback: Calculation can be complex for extended objects or strong fields.