Engineering Mechanics - Hibbeler
Cheatsheet Content
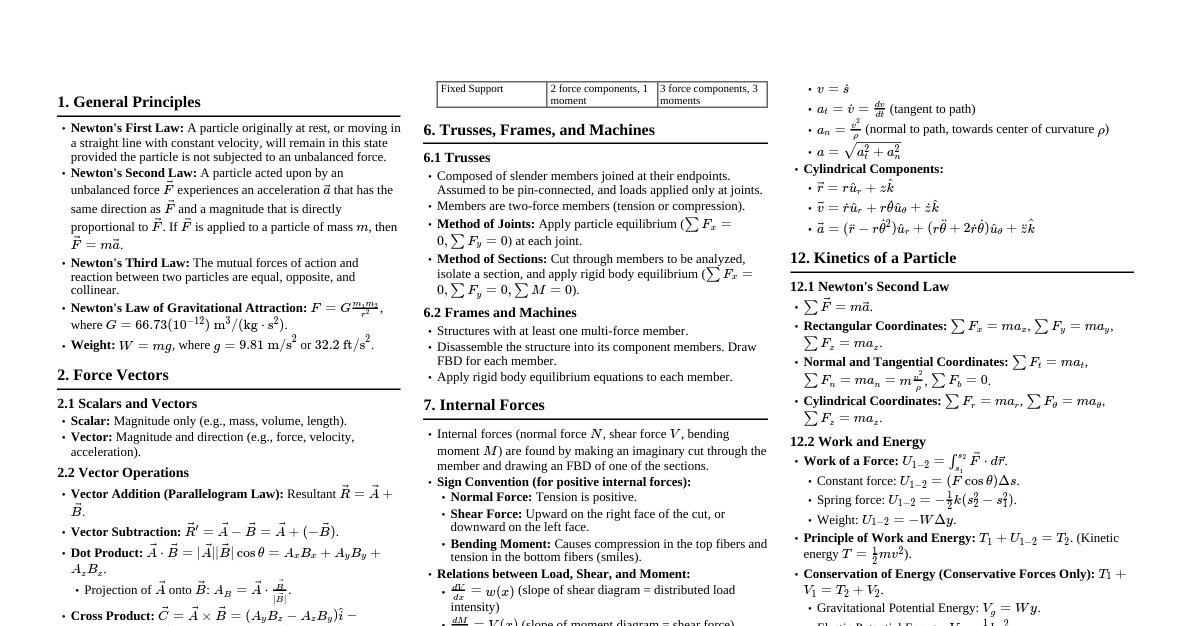
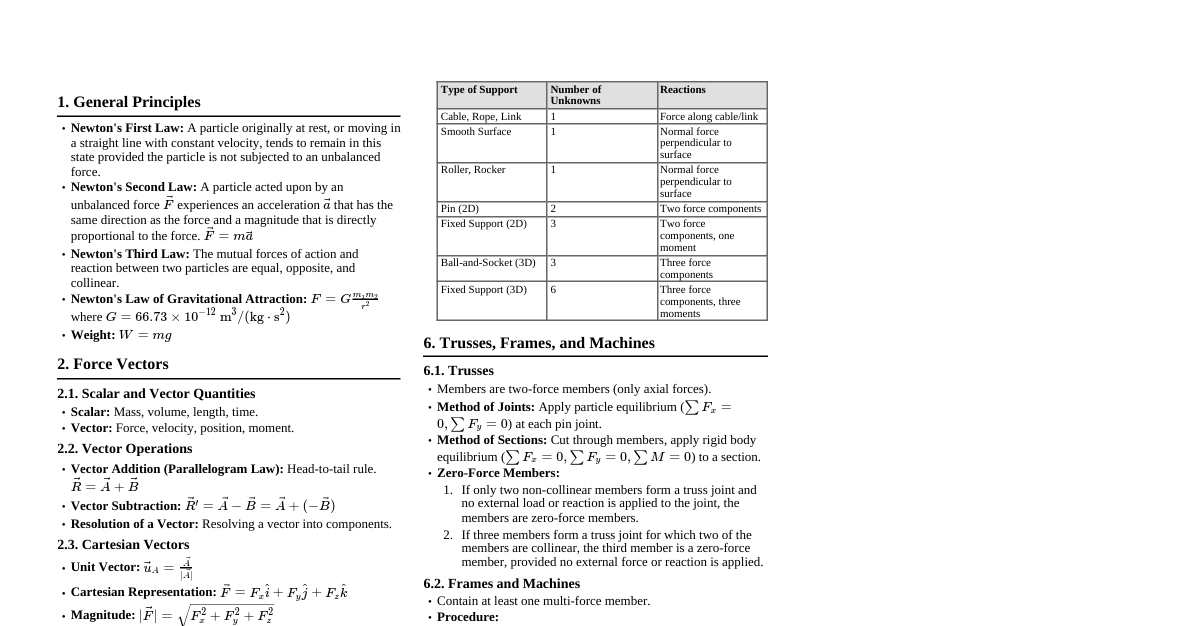
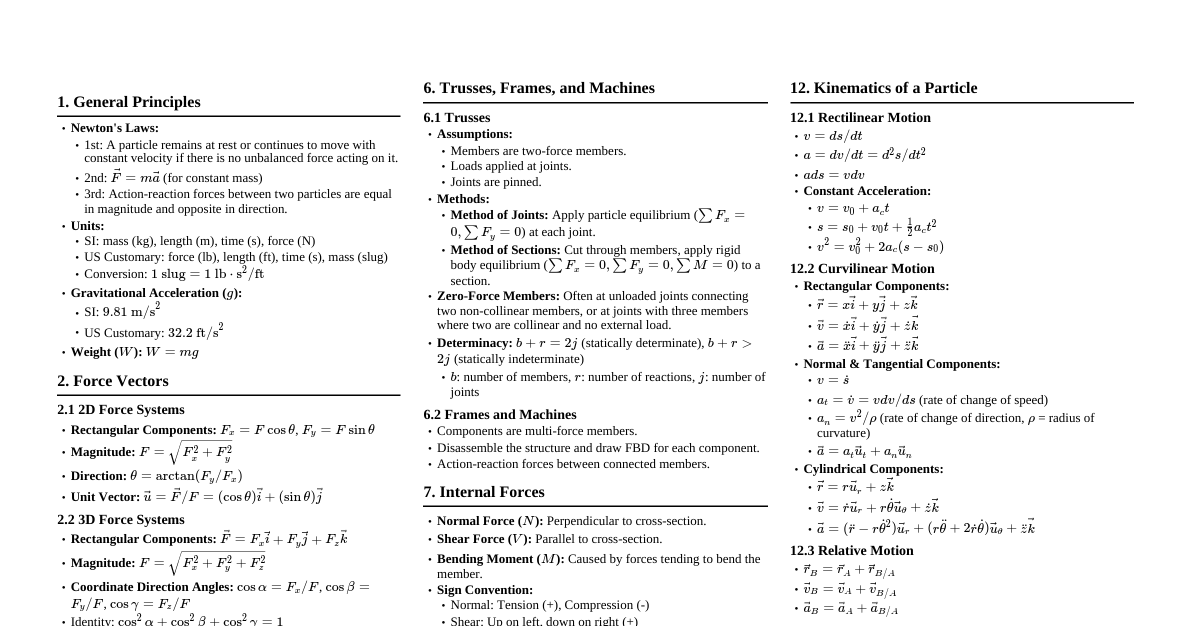
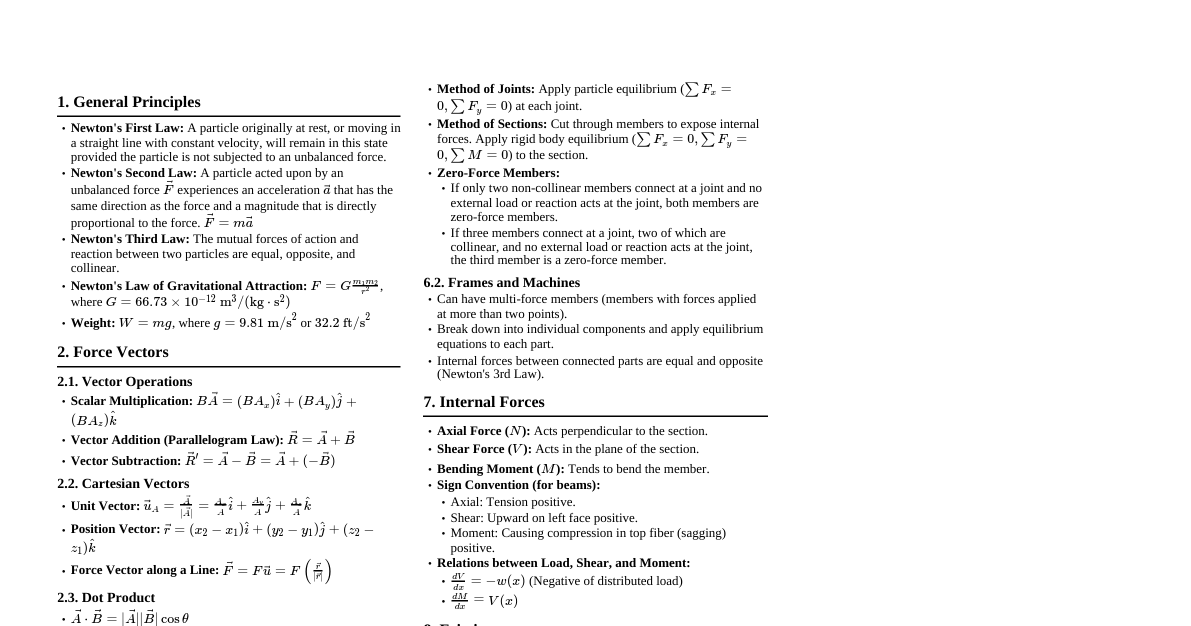
1. General Principles Newton's First Law: A particle originally at rest, or moving in a straight line with constant velocity, tends to remain in this state provided the particle is not subjected to an unbalanced force. Newton's Second Law: A particle acted upon by an unbalanced force $F$ experiences an acceleration $a$ that has the same direction as the force and a magnitude that is directly proportional to the force. $F = ma$. Newton's Third Law: The mutual forces of action and reaction between two particles are equal, opposite, and collinear. Newton's Law of Gravitational Attraction: $F = G \frac{m_1 m_2}{r^2}$, where $G = 66.73 \times 10^{-12} \text{ m}^3/(\text{kg} \cdot \text{s}^2)$. Weight: $W = mg$, where $g = 9.81 \text{ m/s}^2$ or $32.2 \text{ ft/s}^2$. 2. Force Vectors 2.1 Scalars and Vectors Scalar: Magnitude only (e.g., mass, volume, length). Vector: Magnitude and direction (e.g., force, velocity, acceleration). 2.2 Vector Operations Vector Addition (Parallelogram Law): $\vec{R} = \vec{A} + \vec{B}$. Tail-to-head or parallelogram. Vector Subtraction: $\vec{R}' = \vec{A} - \vec{B} = \vec{A} + (-\vec{B})$. 2.3 Cartesian Vectors Unit Vector: $\vec{u}_A = \frac{\vec{A}}{|\vec{A}|}$. Cartesian Form: $\vec{A} = A_x \hat{i} + A_y \hat{j} + A_z \hat{k}$. Magnitude: $|\vec{A}| = \sqrt{A_x^2 + A_y^2 + A_z^2}$. Direction Cosines: $\cos \alpha = \frac{A_x}{|\vec{A}|}$, $\cos \beta = \frac{A_y}{|\vec{A}|}$, $\cos \gamma = \frac{A_z}{|\vec{A}|}$. Also, $\cos^2 \alpha + \cos^2 \beta + \cos^2 \gamma = 1$. Position Vector: $\vec{r} = (x_B - x_A)\hat{i} + (y_B - y_A)\hat{j} + (z_B - z_A)\hat{k}$. 2.4 Dot Product $\vec{A} \cdot \vec{B} = |\vec{A}| |\vec{B}| \cos \theta$. $\vec{A} \cdot \vec{B} = A_x B_x + A_y B_y + A_z B_z$. Angle between two vectors: $\theta = \cos^{-1} \left( \frac{\vec{A} \cdot \vec{B}}{|\vec{A}| |\vec{B}|} \right)$. Projection of $\vec{A}$ onto $\vec{B}$: $A_B = \vec{A} \cdot \vec{u}_B$. 3. Equilibrium of a Particle Free-Body Diagram (FBD): Essential for solving problems. Isolate the particle and show all external forces acting on it. Equations of Equilibrium (2D): $\sum F_x = 0$ $\sum F_y = 0$ Equations of Equilibrium (3D): $\sum F_x = 0$ $\sum F_y = 0$ $\sum F_z = 0$ 4. Force System Resultants 4.1 Moment of a Force Scalar Formulation (2D): $M_O = Fd$, where $d$ is the perpendicular distance from $O$ to the line of action of $F$. Vector Formulation (3D): $\vec{M}_O = \vec{r} \times \vec{F}$. $\vec{r}$ is a position vector from point $O$ to any point on the line of action of $\vec{F}$. $\vec{M}_O = (r_y F_z - r_z F_y)\hat{i} + (r_z F_x - r_x F_z)\hat{j} + (r_x F_y - r_y F_x)\hat{k}$. Varignon's Theorem: The moment of a force about a point is equal to the sum of the moments of its components about the point. 4.2 Moment of a Couple $\vec{M} = \vec{r} \times \vec{F}$. Magnitude $M = Fd$, where $d$ is the perpendicular distance between the forces. 4.3 Resultants of a Force and Couple System A system of forces and couple moments can be reduced to an equivalent single resultant force $\vec{F}_R = \sum \vec{F}$ acting at a specific point $O$, and a resultant couple moment $\vec{M}_{R_O} = \sum \vec{M}_O + \sum \vec{M}_{couple}$. 5. Equilibrium of a Rigid Body 5.1 Free-Body Diagrams (FBDs) Supports and Reactions: Support Type Reactions Roller 1 (Perpendicular force) Pin 2 (Two force components) Fixed Support 3 (Two force components, one moment) Cable/Rope 1 (Tension along cable) 5.2 Equations of Equilibrium (2D) $\sum F_x = 0$ $\sum F_y = 0$ $\sum M_O = 0$ (Moment about any point $O$) 5.3 Equations of Equilibrium (3D) $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ 6. Trusses, Frames, and Machines 6.1 Trusses Assumptions: Members are connected by pins, loads applied at joints, members are two-force members. Method of Joints: Apply particle equilibrium ($\sum F_x = 0, \sum F_y = 0$) at each joint. Method of Sections: Cut the truss to expose desired members. Apply rigid body equilibrium ($\sum F_x = 0, \sum F_y = 0, \sum M = 0$) to either section. Zero-Force Members: If only two non-collinear members connect at a joint and no external load/reaction acts, both are zero-force members. If three members connect at a joint, two are collinear, and no external load/reaction acts, the third non-collinear member is a zero-force member. 6.2 Frames and Machines Composed of multiforce members. Disassemble the frame/machine into its component parts. Draw FBD for each part and apply rigid body equilibrium equations. Internal forces between connected parts are equal and opposite (Newton's 3rd Law). 7. Internal Forces 7.1 Shear Force and Bending Moment Sign Convention: Axial Force (N): Tension is positive. Shear Force (V): Upward on left face, downward on right face is positive. Bending Moment (M): Causes compression in top fibres (sagging) is positive. Shear and Moment Equations & Diagrams: $\frac{dV}{dx} = w(x)$ (Distributed load) $\frac{dM}{dx} = V(x)$ (Shear force) Area under $w(x)$ diagram = change in $V$. Area under $V(x)$ diagram = change in $M$. 8. Friction Static Friction: $F_s \le \mu_s N$. Maximum static friction $F_{s,max} = \mu_s N$. Kinetic Friction: $F_k = \mu_k N$. Always less than static friction. $\mu_s$ is coefficient of static friction, $\mu_k$ is coefficient of kinetic friction. The angle of static friction $\phi_s = \tan^{-1}(\mu_s)$. 9. Center of Gravity and Centroid Centroid of Area: $\bar{x} = \frac{\int \tilde{x} dA}{\int dA} = \frac{\sum \tilde{x}_i A_i}{\sum A_i}$ $\bar{y} = \frac{\int \tilde{y} dA}{\int dA} = \frac{\sum \tilde{y}_i A_i}{\sum A_i}$ Centroid of Volume: $\bar{x} = \frac{\int \tilde{x} dV}{\int dV} = \frac{\sum \tilde{x}_i V_i}{\sum V_i}$ $\bar{y} = \frac{\int \tilde{y} dV}{\int dV} = \frac{\sum \tilde{y}_i V_i}{\sum V_i}$ $\bar{z} = \frac{\int \tilde{z} dV}{\int dV} = \frac{\sum \tilde{z}_i V_i}{\sum V_i}$ Centroid of Line: Similarly for $\bar{x}, \bar{y}, \bar{z}$ using $\int \tilde{x} dL / \int dL$. Pappus-Guldinus Theorems: Area of surface of revolution: $A = \theta \bar{r} L$ (for $L$ rotated by $\theta$ radians). Volume of body of revolution: $V = \theta \bar{r} A$ (for $A$ rotated by $\theta$ radians). 10. Moments of Inertia 10.1 Area Moment of Inertia $I_x = \int y^2 dA$ $I_y = \int x^2 dA$ Polar Moment of Inertia: $J_O = \int r^2 dA = I_x + I_y$. Parallel-Axis Theorem: $I_x = \bar{I}_{x'} + A d_y^2$, $I_y = \bar{I}_{y'} + A d_x^2$. Radius of Gyration: $k = \sqrt{I/A}$. 10.2 Mass Moment of Inertia $I = \int r^2 dm$. For a rigid body. Parallel-Axis Theorem: $I = \bar{I} + md^2$. 11. Kinematics of a Particle 11.1 Rectilinear Motion $v = \frac{ds}{dt}$ $a = \frac{dv}{dt} = \frac{d^2s}{dt^2}$ $a ds = v dv$ Constant Acceleration: $v = v_0 + a_c t$ $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$ $v^2 = v_0^2 + 2 a_c (s - s_0)$ 11.2 Curvilinear Motion Rectangular Components: $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ $\vec{v} = \dot{x}\hat{i} + \dot{y}\hat{j} + \dot{z}\hat{k}$ $\vec{a} = \ddot{x}\hat{i} + \ddot{y}\hat{j} + \ddot{z}\hat{k}$ Normal and Tangential Components: $\vec{v} = v \hat{u}_t$ $\vec{a} = a_t \hat{u}_t + a_n \hat{u}_n$ $a_t = \dot{v}$ or $v \frac{dv}{ds}$ $a_n = \frac{v^2}{\rho}$, where $\rho$ is the radius of curvature. Cylindrical Components: $\vec{r} = r \hat{u}_r + z \hat{u}_z$ $\vec{v} = \dot{r} \hat{u}_r + r \dot{\theta} \hat{u}_\theta + \dot{z} \hat{u}_z$ $\vec{a} = (\ddot{r} - r \dot{\theta}^2) \hat{u}_r + (r \ddot{\theta} + 2 \dot{r} \dot{\theta}) \hat{u}_\theta + \ddot{z} \hat{u}_z$ 11.3 Relative Motion of Two Particles $\vec{r}_{B} = \vec{r}_{A} + \vec{r}_{B/A}$ $\vec{v}_{B} = \vec{v}_{A} + \vec{v}_{B/A}$ $\vec{a}_{B} = \vec{a}_{A} + \vec{a}_{B/A}$ 12. Kinetics of a Particle 12.1 Newton's Second Law $\sum \vec{F} = m \vec{a}$ Rectangular: $\sum F_x = m a_x$, $\sum F_y = m a_y$, $\sum F_z = m a_z$. Normal-Tangential: $\sum F_t = m a_t$, $\sum F_n = m a_n$. Cylindrical: $\sum F_r = m a_r$, $\sum F_\theta = m a_\theta$, $\sum F_z = m a_z$. 12.2 Work and Energy Work of a Force: $U_{1-2} = \int \vec{F} \cdot d\vec{r}$. Constant force: $U_{1-2} = (F \cos\theta) s$. Weight: $U_{1-2} = -W \Delta y$. Spring: $U_{1-2} = \frac{1}{2} k (s_1^2 - s_2^2)$. Principle of Work and Energy: $T_1 + U_{1-2} = T_2$. Kinetic Energy: $T = \frac{1}{2} m v^2$. Conservation of Energy: $T_1 + V_1 = T_2 + V_2$. Potential Energy (Gravitational): $V_g = W y$. Potential Energy (Elastic): $V_e = \frac{1}{2} k s^2$. Power: $P = \frac{dU}{dt} = \vec{F} \cdot \vec{v}$. 12.3 Impulse and Momentum Linear Impulse: $\int \vec{F} dt$. Linear Momentum: $\vec{L} = m \vec{v}$. Principle of Linear Impulse and Momentum: $m \vec{v}_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m \vec{v}_2$. Conservation of Linear Momentum: If $\sum \int \vec{F} dt = 0$, then $m \vec{v}_1 = m \vec{v}_2$. Impact: Coefficient of Restitution: $e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1}$. $e=1$ (elastic), $e=0$ (plastic). Angular Momentum: $(\vec{H}_O)_1 + \sum \int_{t_1}^{t_2} \vec{M}_O dt = (\vec{H}_O)_2$. For a particle: $\vec{H}_O = \vec{r} \times m \vec{v}$. 13. Planar Kinematics of a Rigid Body 13.1 Translation $\vec{v}_B = \vec{v}_A$, $\vec{a}_B = \vec{a}_A$. 13.2 Rotation about a Fixed Axis $\omega = \frac{d\theta}{dt}$, $\alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2}$, $\alpha d\theta = \omega d\omega$. $v = \omega r$, $a_t = \alpha r$, $a_n = \omega^2 r$. 13.3 General Plane Motion (Relative Velocity) $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$. ($I$ is the instantaneous center of zero velocity) $\vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$.