Mechanics Cheatsheet (Hibbeler
Cheatsheet Content
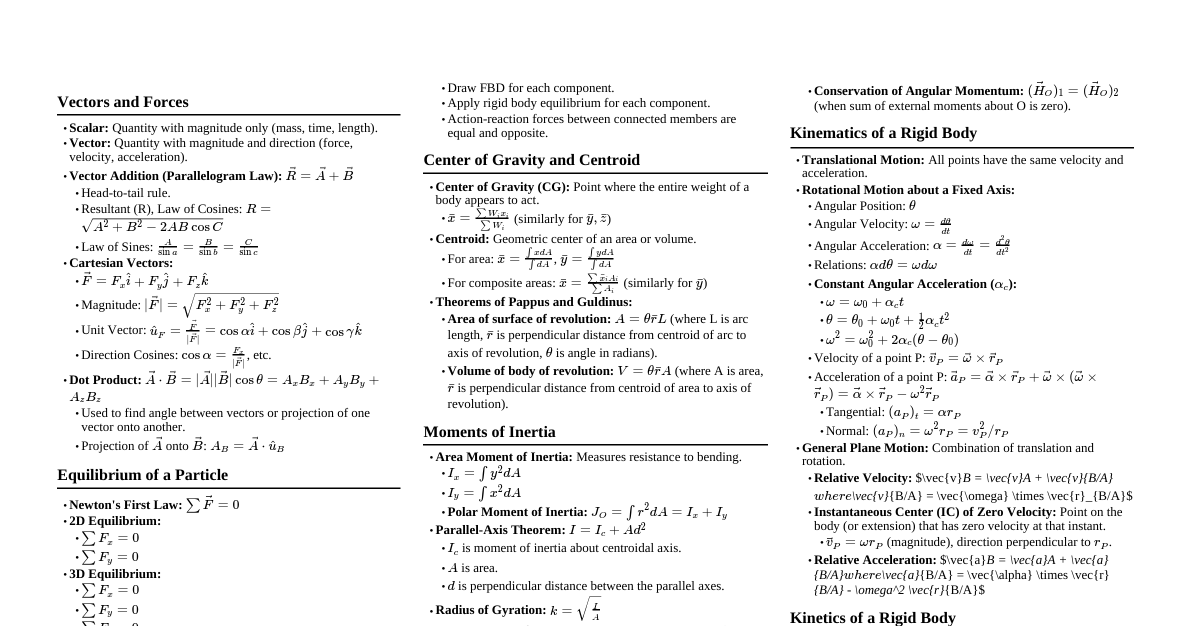
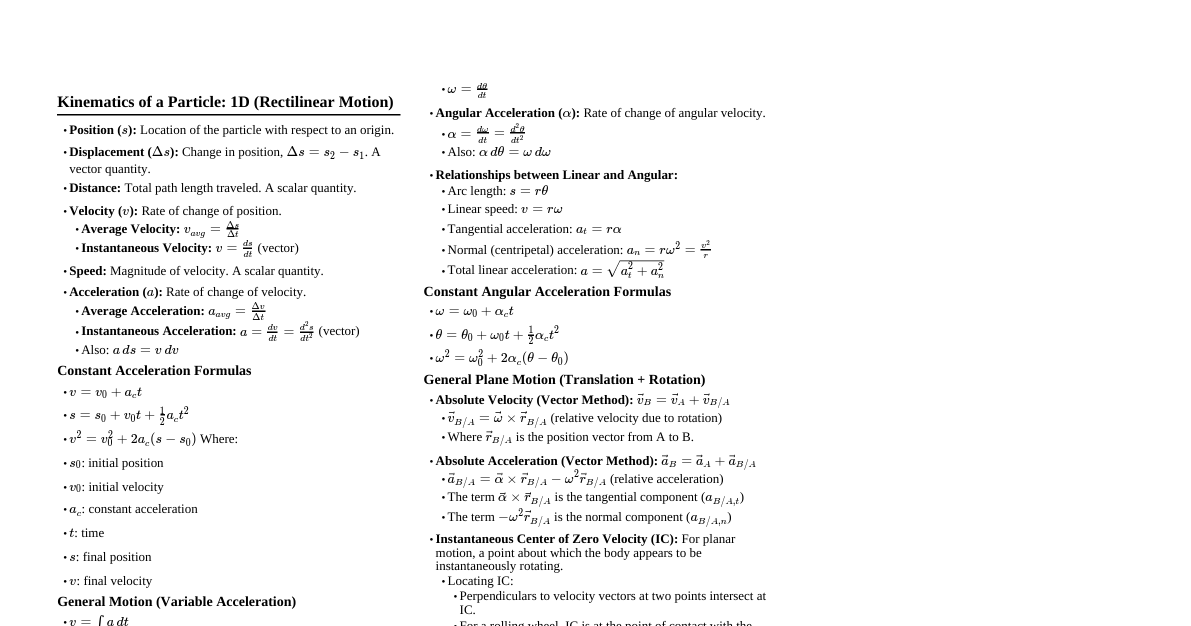
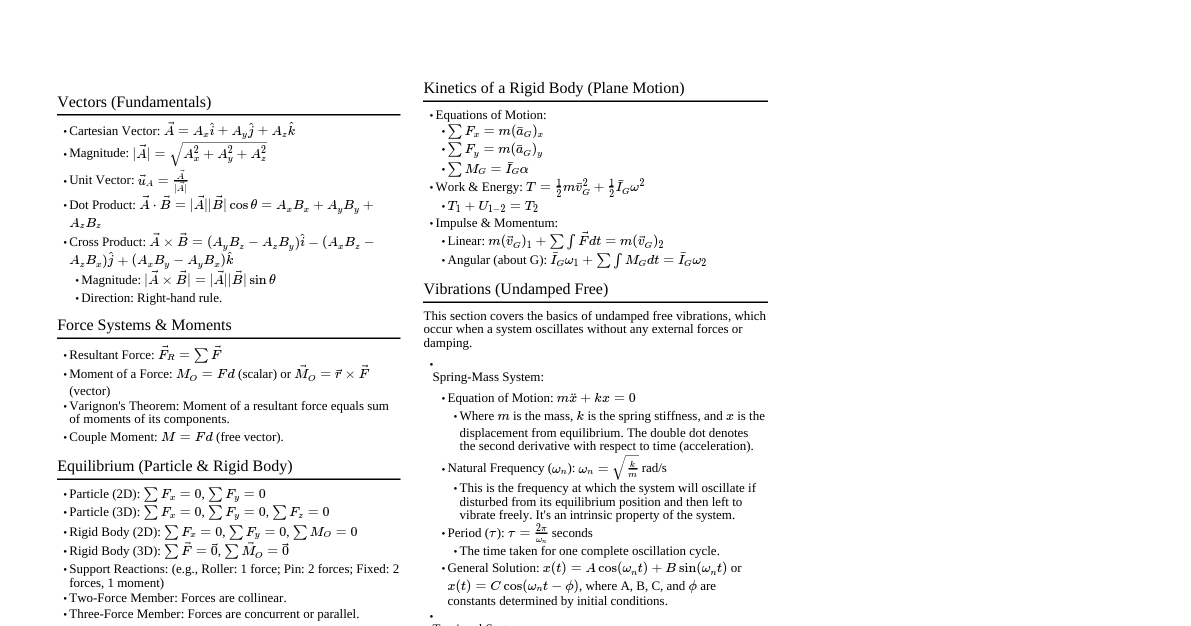
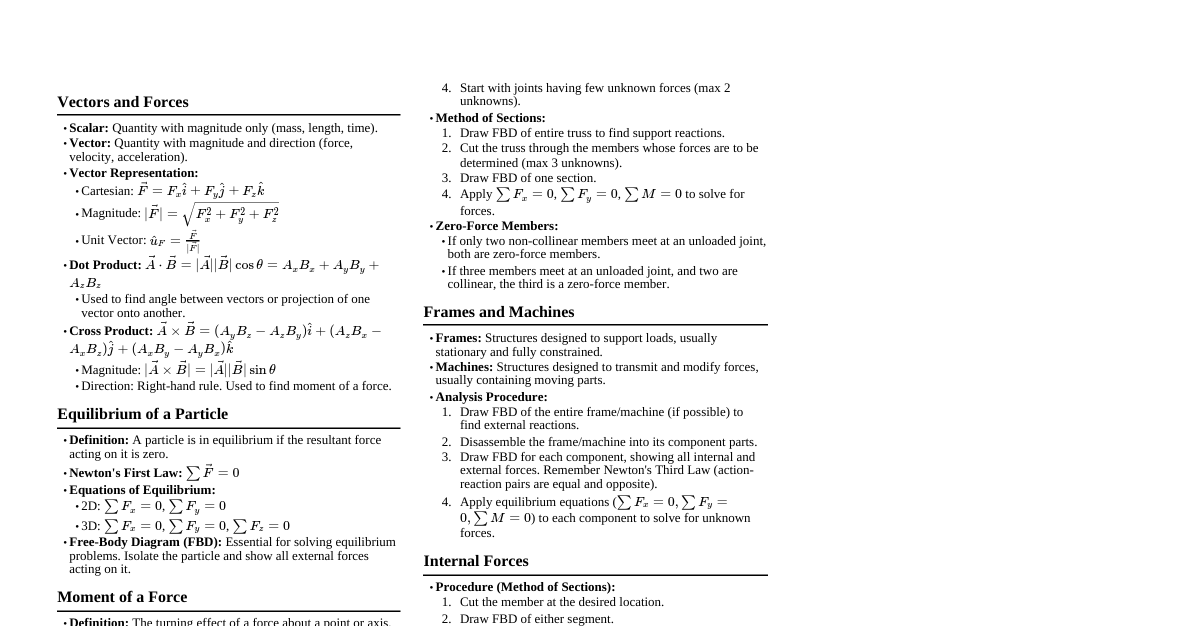
### บทนำ: หลักการพื้นฐาน - **กฎการเคลื่อนที่ของนิวตัน:** - กฎข้อที่ 1: วัตถุที่หยุดนิ่งจะรักษาสภาพหยุดนิ่ง วัตถุที่เคลื่อนที่จะรักษาสภาพเคลื่อนที่ด้วยความเร็วคงที่ในแนวเส้นตรง เว้นแต่จะมีแรงภายนอกมากระทำ - กฎข้อที่ 2: $F = ma$ (แรงเท่ากับมวลคูณความเร่ง) - กฎข้อที่ 3: แรงกิริยาเท่ากับแรงปฏิกิริยา มีขนาดเท่ากันแต่ทิศทางตรงข้าม - **กฎแรงโน้มถ่วงของนิวตัน:** $F = G \frac{m_1 m_2}{r^2}$ (โดย $G$ คือค่าคงที่โน้มถ่วงสากล) - **หน่วย:** ระบบ SI (เมตร, กิโลกรัม, วินาที, นิวตัน) และระบบ US Customary (ฟุต, ปอนด์, วินาที, สลัก) ### เวกเตอร์แรง - **ปริมาณสเกลาร์และเวกเตอร์:** - สเกลาร์: มีขนาดเท่านั้น (เช่น มวล, เวลา, อุณหภูมิ) - เวกเตอร์: มีทั้งขนาดและทิศทาง (เช่น แรง, ความเร็ว, ความเร่ง) - **การบวกเวกเตอร์:** - **กฎสี่เหลี่ยมด้านขนาน:** ใช้สำหรับการบวกสองเวกเตอร์ - **กฎสามเหลี่ยม:** ใช้สำหรับการบวกสองเวกเตอร์ - **การแตกองค์ประกอบ:** แตกเวกเตอร์ออกเป็นองค์ประกอบตามแกน $x, y, z$ ($F_x, F_y, F_z$) - **เวกเตอร์ตำแหน่ง:** $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ - **เวกเตอร์หน่วย:** $\vec{u} = \frac{\vec{A}}{|\vec{A}|}$ (เวกเตอร์ที่มีขนาดเท่ากับ 1 ใช้สำหรับระบุทิศทาง) - **ผลคูณจุด (Dot Product):** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z$ ใช้หาขนาดขององค์ประกอบเวกเตอร์หรือมุมระหว่างเวกเตอร์ - **ผลคูณไขว้ (Cross Product):** $\vec{C} = \vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} - (A_x B_z - A_z B_x)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$ ใช้หาเวกเตอร์ที่ตั้งฉากกับระนาบที่ประกอบด้วย $\vec{A}$ และ $\vec{B}$ ### สมดุลของอนุภาค - **แผนภาพวัตถุอิสระ (Free-Body Diagram - FBD):** แสดงแรงภายนอกทั้งหมดที่กระทำต่ออนุภาค - **เงื่อนไขสมดุล:** $\sum \vec{F} = 0$ - ใน 2 มิติ: $\sum F_x = 0$, $\sum F_y = 0$ - ใน 3 มิติ: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ ### แรงลัพธ์ของระบบแรง - **โมเมนต์ของแรง (Moment of a Force):** - รอบจุด: $M_O = Fd$ (โดย $d$ คือระยะตั้งฉากจากจุด $O$ ไปยังแนวแรง) - รูปแบบเวกเตอร์: $\vec{M}_O = \vec{r} \times \vec{F}$ - **หลักการของวาริกนอน (Varignon's Theorem):** โมเมนต์ของแรงลัพธ์รอบจุดใดๆ เท่ากับผลรวมของโมเมนต์ขององค์ประกอบแรงรอบจุดเดียวกัน - **โมเมนต์ของคู่ควบ (Couple Moment):** $M = Fd$ (มีค่าคงที่และเป็นเวกเตอร์อิสระ) - **การลดทอนระบบแรง:** แทนที่ระบบแรงที่ซับซ้อนด้วยแรงลัพธ์หนึ่งแรงและโมเมนต์ลัพธ์หนึ่งโมเมนต์ที่จุดใดจุดหนึ่ง - $\vec{F}_R = \sum \vec{F}$ - $\vec{M}_{R_O} = \sum \vec{M}_O + \sum (\vec{r} \times \vec{F})$ ### สมดุลของวัตถุแข็งเกร็ง - **แผนภาพวัตถุอิสระ (FBD):** แสดงแรงภายนอกและโมเมนต์ทั้งหมดที่กระทำต่อวัตถุ - **เงื่อนไขสมดุล:** - $\sum \vec{F} = 0$ (ผลรวมแรงเท่ากับศูนย์) - $\sum \vec{M}_O = 0$ (ผลรวมโมเมนต์รอบจุดใดๆ เท่ากับศูนย์) - **สมการสมดุล 2 มิติ:** - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum M_O = 0$ - **สมการสมดุล 3 มิติ:** - $\sum F_x = 0, \sum F_y = 0, \sum F_z = 0$ - $\sum M_x = 0, \sum M_y = 0, \sum M_z = 0$ - **ชนิดของจุดรองรับและปฏิกิริยา:** - Roller: 1 แรงปฏิกิริยาตั้งฉากกับพื้นผิว - Pin (Hinge): 2 แรงปฏิกิริยา (ในทิศทาง $x$ และ $y$) - Fixed Support: 2 แรงปฏิกิริยาและ 1 โมเมนต์ปฏิกิริยา (ใน 2 มิติ) ### การวิเคราะห์โครงสร้าง - **โครงข้อหมุน (Trusses):** - **สมมติฐาน:** แรงกระทำที่จุดต่อเท่านั้น, จุดต่อเป็นแบบหมุดเรียบ, ชิ้นส่วนมีน้ำหนักน้อย - **วิธีรอยต่อ (Method of Joints):** วิเคราะห์สมดุลของแรงที่แต่ละจุดต่อ - **วิธีภาคตัด (Method of Sections):** ตัดโครงสร้างผ่านชิ้นส่วนที่ต้องการหาแรง และใช้สมการสมดุลของส่วนที่ตัด - **โครงเฟรมและเครื่องจักร (Frames and Machines):** - มีชิ้นส่วนหลายชิ้นที่เชื่อมต่อกันและสามารถมีแรงกระทำได้ตามแนวชิ้นส่วน - ต้องแยกชิ้นส่วนแต่ละชิ้นออกจากกันและเขียน FBD สำหรับแต่ละชิ้นส่วน - แรงที่จุดต่อระหว่างชิ้นส่วนจะเป็นแรงคู่กิริยา-ปฏิกิริยา ### แรงเสียดทาน - **แรงเสียดทานแห้ง (Dry Friction):** - **แรงเสียดทานสถิต (Static Friction):** $f_s \le \mu_s N$ (เมื่อ $f_s$ ถึงค่าสูงสุด จะเกิดการเคลื่อนที่) - **แรงเสียดทานจลน์ (Kinetic Friction):** $f_k = \mu_k N$ (เมื่อวัตถุเคลื่อนที่) - โดย $\mu_s$ คือสัมประสิทธิ์แรงเสียดทานสถิต และ $\mu_k$ คือสัมประสิทธิ์แรงเสียดทานจลน์ ($\mu_k ### จุดศูนย์ถ่วงและเซนทรอยด์ - **จุดศูนย์ถ่วง (Center of Gravity - CG):** จุดที่น้ำหนักรวมของวัตถุกระทำ - $W\bar{x} = \sum W_i x_i$, $W\bar{y} = \sum W_i y_i$, $W\bar{z} = \sum W_i z_i$ - **เซนทรอยด์ (Centroid):** จุดศูนย์กลางทางเรขาคณิตของพื้นที่, เส้น, หรือปริมาตร - **สำหรับพื้นที่:** $\bar{x} = \frac{\int x dA}{\int dA}$, $\bar{y} = \frac{\int y dA}{\int dA}$ - **สำหรับปริมาตร:** $\bar{x} = \frac{\int x dV}{\int dV}$, $\bar{y} = \frac{\int y dV}{\int dV}$, $\bar{z} = \frac{\int z dV}{\int dV}$ - **วัตถุประกอบ (Composite Bodies):** ใช้หลักการหาเซนทรอยด์จากการรวมหรือลบส่วนประกอบ - $\bar{X} = \frac{\sum \bar{x}_i A_i}{\sum A_i}$ (สำหรับพื้นที่) ### โมเมนต์ความเฉื่อย - **โมเมนต์ความเฉื่อยของพื้นที่ (Moment of Inertia for Area):** - $I_x = \int y^2 dA$ - $I_y = \int x^2 dA$ - $J_O = I_x + I_y = \int r^2 dA$ (โมเมนต์ความเฉื่อยเชิงขั้ว) - **ทฤษฎีแกนขนาน (Parallel-Axis Theorem):** - $I = \bar{I} + Ad^2$ (โดย $\bar{I}$ คือโมเมนต์ความเฉื่อยรอบแกนที่ผ่านเซนทรอยด์, $A$ คือพื้นที่, $d$ คือระยะห่างระหว่างแกนขนาน) - **โมเมนต์ความเฉื่อยของมวล (Mass Moment of Inertia):** - $I = \int r^2 dm$ - ทฤษฎีแกนขนานสำหรับมวล: $I = \bar{I} + md^2$ ### จลนศาสตร์ของอนุภาค (Kinematics of a Particle) - **การเคลื่อนที่แนวตรง:** - ความเร็ว: $v = \frac{ds}{dt}$ - ความเร่ง: $a = \frac{dv}{dt} = v \frac{dv}{ds}$ - สูตรคงที่: - $v = v_0 + at$ - $s = s_0 + v_0 t + \frac{1}{2} at^2$ - $v^2 = v_0^2 + 2a(s - s_0)$ - **การเคลื่อนที่แบบโปรเจกไทล์:** - แกน x (ความเร็วคงที่): $v_x = (v_0)_x$, $x = x_0 + (v_0)_x t$ - แกน y (ความเร่งคงที่ $g$): $v_y = (v_0)_y - gt$, $y = y_0 + (v_0)_y t - \frac{1}{2} gt^2$, $v_y^2 = (v_0)_y^2 - 2g(y - y_0)$ - **การเคลื่อนที่บนเส้นโค้ง (ระนาบ):** - **องค์ประกอบสี่เหลี่ยมผืนผ้า:** - $\vec{v} = \dot{x}\hat{i} + \dot{y}\hat{j}$ - $\vec{a} = \ddot{x}\hat{i} + \ddot{y}\hat{j}$ - **องค์ประกอบแนวสัมผัสและแนวฉาก:** - $\vec{v} = v\hat{u}_t$ - $\vec{a} = \dot{v}\hat{u}_t + \frac{v^2}{\rho}\hat{u}_n$ (โดย $\rho$ คือรัศมีความโค้ง) - **องค์ประกอบเชิงขั้ว:** - $\vec{v} = \dot{r}\hat{u}_r + r\dot{\theta}\hat{u}_\theta$ - $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\hat{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{u}_\theta$ ### จลนพลศาสตร์ของอนุภาค (Kinetics of a Particle) - **สมการการเคลื่อนที่ (Equation of Motion):** $\sum \vec{F} = m\vec{a}$ - **องค์ประกอบสี่เหลี่ยมผืนผ้า:** $\sum F_x = ma_x$, $\sum F_y = ma_y$, $\sum F_z = ma_z$ - **องค์ประกอบแนวสัมผัสและแนวฉาก:** $\sum F_t = ma_t$, $\sum F_n = ma_n = m\frac{v^2}{\rho}$ - **องค์ประกอบเชิงขั้ว:** $\sum F_r = ma_r$, $\sum F_\theta = ma_\theta$ - **หลักการงาน-พลังงาน (Work and Energy):** - งานของแรง: $U_{1-2} = \int \vec{F} \cdot d\vec{r}$ - งานของสปริง: $U_s = -\frac{1}{2} k s^2$ - พลังงานจลน์: $T = \frac{1}{2} mv^2$ - หลักการงาน-พลังงาน: $T_1 + U_{1-2} = T_2$ - แรงอนุรักษ์: แรงโน้มถ่วง, แรงสปริง - พลังงานศักย์: $V_g = W y$ (โน้มถ่วง), $V_e = \frac{1}{2} k s^2$ (สปริง) - การอนุรักษ์พลังงาน: $T_1 + V_1 = T_2 + V_2$ (สำหรับแรงอนุรักษ์เท่านั้น) - **หลักการดลและโมเมนตัม (Impulse and Momentum):** - โมเมนตัมเชิงเส้น: $\vec{L} = m\vec{v}$ - หลักการดลและโมเมนตัมเชิงเส้น: $m\vec{v}_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m\vec{v}_2$ - การอนุรักษ์โมเมนตัมเชิงเส้น: $\sum m\vec{v}_1 = \sum m\vec{v}_2$ (เมื่อไม่มีแรงภายนอกกระทำ) - โมเมนตัมเชิงมุม: $\vec{H}_O = \vec{r} \times m\vec{v}$ - หลักการดลและโมเมนตัมเชิงมุม: $(\vec{H}_O)_1 + \sum \int_{t_1}^{t_2} \vec{M}_O dt = (\vec{H}_O)_2$ - การอนุรักษ์โมเมนตัมเชิงมุม: $(\vec{H}_O)_1 = (\vec{H}_O)_2$ (เมื่อไม่มีโมเมนต์ภายนอกกระทำ) - **การชนกัน (Impact):** - สัมประสิทธิ์การคืนตัว (Coefficient of Restitution): $e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1}$ - การชนแบบรวม (Perfectly Plastic Impact): $e=0$ - การชนแบบยืดหยุ่นสมบูรณ์ (Perfectly Elastic Impact): $e=1$ ### จลนศาสตร์ของวัตถุแข็งเกร็ง (Kinematics of a Rigid Body) - **การเคลื่อนที่แบบเลื่อนขนาน (Translation):** - $\vec{v}_B = \vec{v}_A$ - $\vec{a}_B = \vec{a}_A$ - **การเคลื่อนที่แบบหมุนรอบแกนคงที่ (Rotation about a Fixed Axis):** - ความเร็วเชิงมุม: $\omega = \frac{d\theta}{dt}$ - ความเร่งเชิงมุม: $\alpha = \frac{d\omega}{dt} = \omega \frac{d\omega}{d\theta}$ - ความเร็วของจุด: $v = \omega r$ - ความเร่งของจุด: $a_t = \alpha r$, $a_n = \omega^2 r = \frac{v^2}{r}$ - **การเคลื่อนที่ทั่วไปแบบระนาบ (General Plane Motion):** - **ความเร็วสัมพัทธ์:** $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$ - **ศูนย์กลางความเร็วชั่วขณะ (Instantaneous Center - IC):** จุดที่มีความเร็วเป็นศูนย์ - **ความเร่งสัมพัทธ์:** $\vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$ ### จลนพลศาสตร์ของวัตถุแข็งเกร็ง (Kinetics of a Rigid Body) - **สมการการเคลื่อนที่ (Equation of Motion):** - $\sum \vec{F} = m\vec{a}_G$ (แรงลัพธ์เท่ากับมวลคูณความเร่งของจุดศูนย์ถ่วง) - $\sum M_G = I_G \alpha$ (โมเมนต์ลัพธ์รอบจุดศูนย์ถ่วงเท่ากับโมเมนต์ความเฉื่อยรอบจุดศูนย์ถ่วงคูณความเร่งเชิงมุม) - หรือ $\sum M_P = I_P \alpha$ (สำหรับจุด $P$ ที่เป็นจุดหมุนคงที่) - **หลักการงาน-พลังงาน:** - พลังงานจลน์: $T = \frac{1}{2} m v_G^2 + \frac{1}{2} I_G \omega^2$ - หลักการงาน-พลังงาน: $T_1 + U_{1-2} = T_2$ - **หลักการดลและโมเมนตัม:** - โมเมนตัมเชิงเส้น: $m(\vec{v}_G)_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m(\vec{v}_G)_2$ - โมเมนตัมเชิงมุม: $(I_G \omega)_1 + \sum \int_{t_1}^{t_2} M_G dt = (I_G \omega)_2$ - สำหรับการเคลื่อนที่แบบหมุนรอบแกนคงที่: $(I_O \omega)_1 + \sum \int_{t_1}^{t_2} M_O dt = (I_O \omega)_2$