Hibbeler Mechanics Cheatsheet
Cheatsheet Content
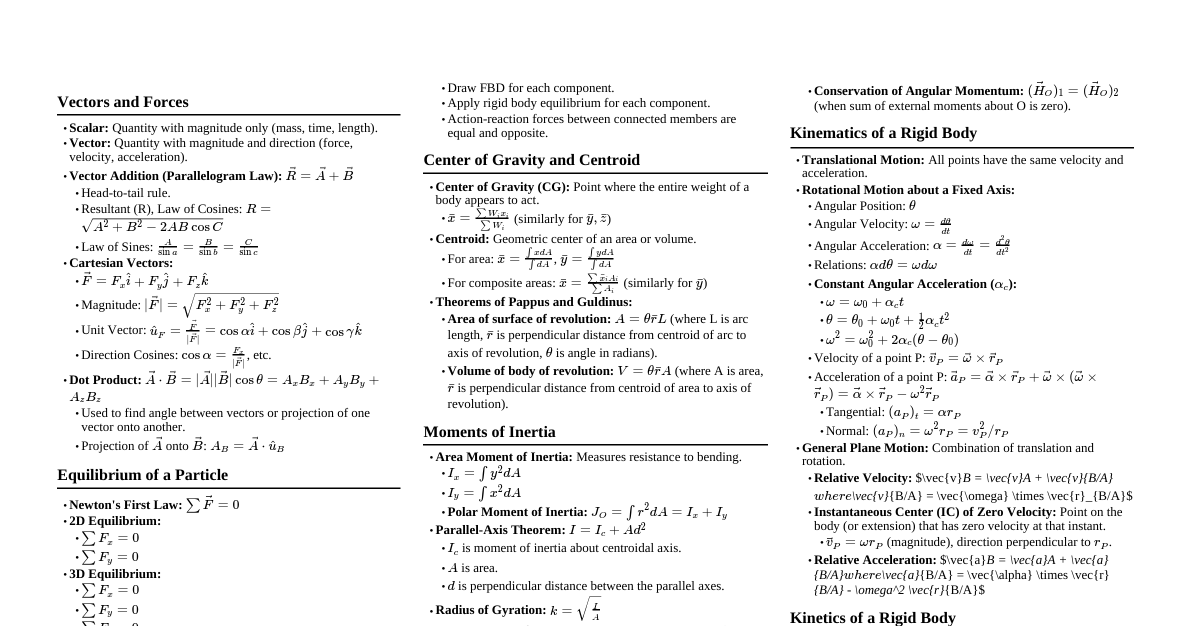
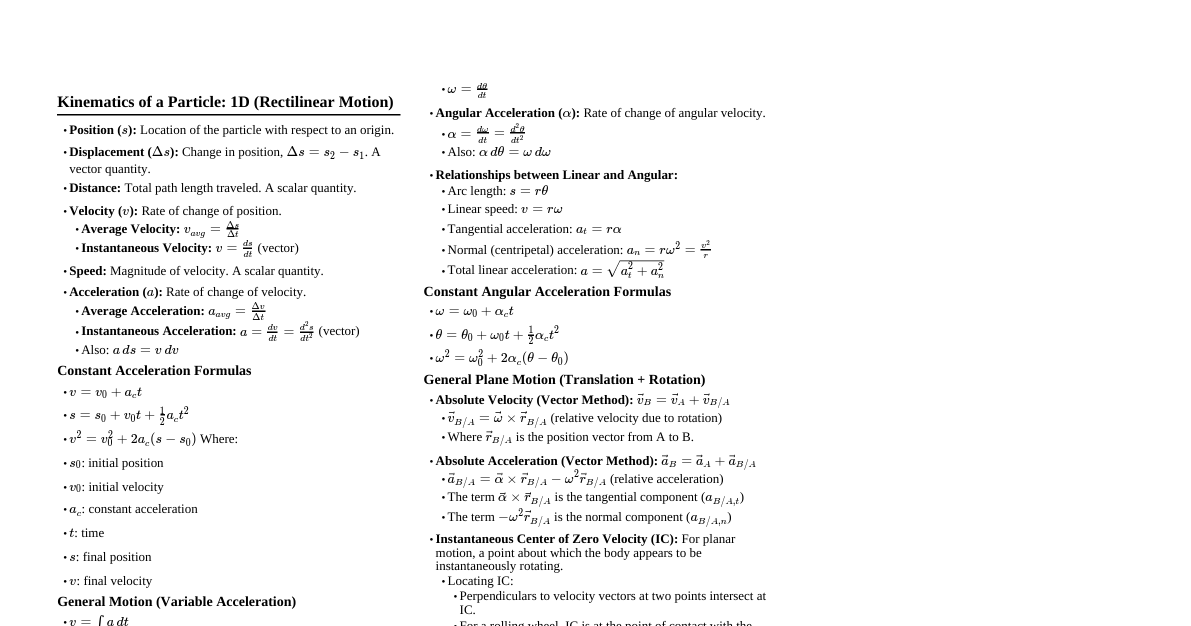
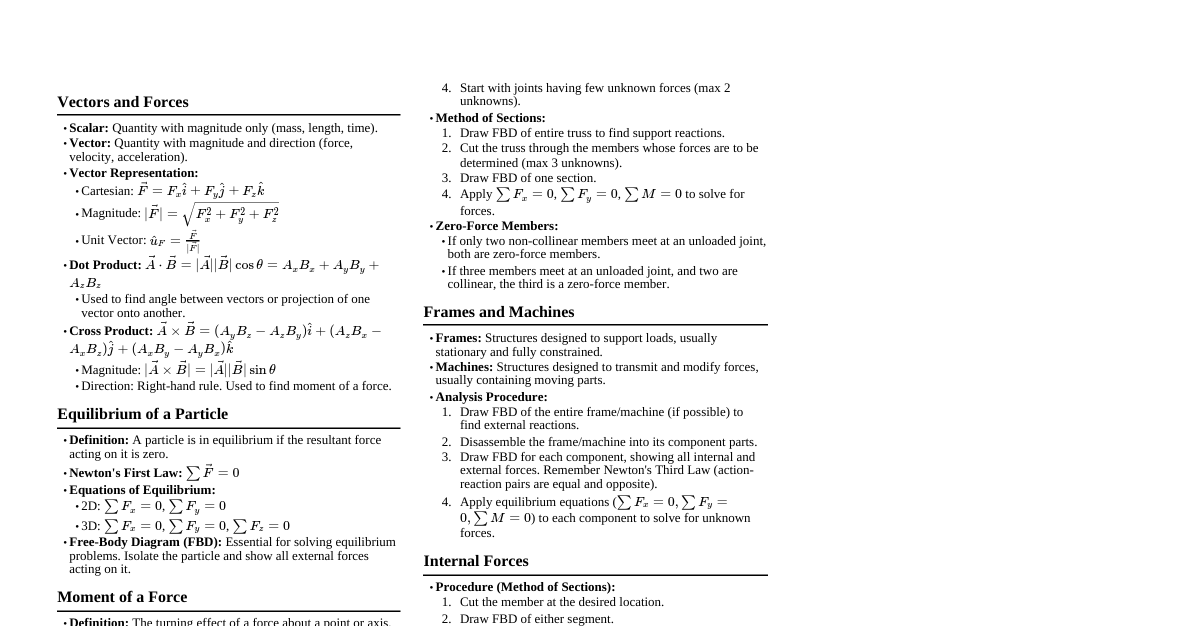
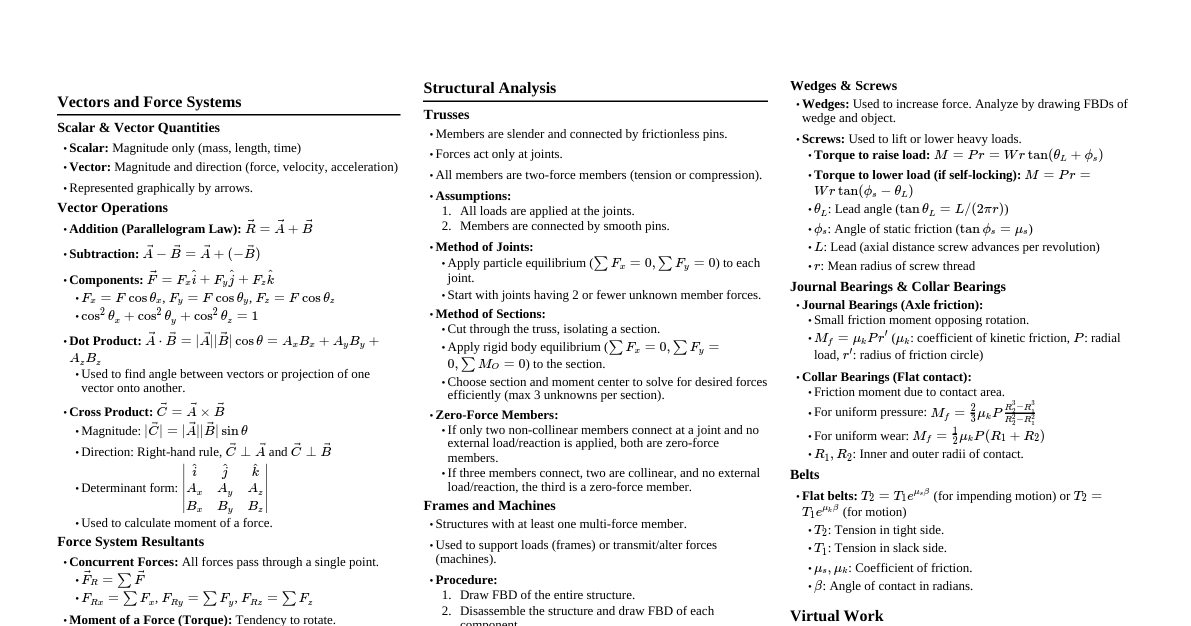
### Vectors (Fundamentals) - **Cartesian Vector:** $\vec{A} = A_x\hat{i} + A_y\hat{j} + A_z\hat{k}$ - **Magnitude:** $|\vec{A}| = \sqrt{A_x^2 + A_y^2 + A_z^2}$ - **Unit Vector:** $\vec{u}_A = \frac{\vec{A}}{|\vec{A}|}$ - **Dot Product:** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z$ - **Cross Product:** $\vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} - (A_x B_z - A_z B_x)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$ - Magnitude: $|\vec{A} \times \vec{B}| = |\vec{A}||\vec{B}|\sin\theta$ - Direction: Right-hand rule. ### Force Systems & Moments - **Resultant Force:** $\vec{F}_R = \sum \vec{F}$ - **Moment of a Force:** $M_O = Fd$ (scalar) or $\vec{M}_O = \vec{r} \times \vec{F}$ (vector) - **Varignon's Theorem:** Moment of a resultant force equals sum of moments of its components. - **Couple Moment:** $M = Fd$ (free vector). ### Equilibrium (Particle & Rigid Body) - **Particle (2D):** $\sum F_x = 0$, $\sum F_y = 0$ - **Particle (3D):** $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - **Rigid Body (2D):** $\sum F_x = 0$, $\sum F_y = 0$, $\sum M_O = 0$ - **Rigid Body (3D):** $\sum \vec{F} = \vec{0}$, $\sum \vec{M}_O = \vec{0}$ - **Support Reactions:** (e.g., Roller: 1 force; Pin: 2 forces; Fixed: 2 forces, 1 moment) - **Two-Force Member:** Forces are collinear. - **Three-Force Member:** Forces are concurrent or parallel. ### Trusses & Frames - **Trusses:** Members are two-force members, loads at joints. - **Method of Joints:** Apply $\sum F_x=0, \sum F_y=0$ to each joint. - **Method of Sections:** Cut through members (max 3), apply rigid body equilibrium equations. - **Frames/Machines:** Disassemble, draw FBDs for each part, apply equilibrium, use action-reaction pairs. ### Center of Gravity & Moments of Inertia - **Center of Gravity:** $\bar{x} = \frac{\sum \tilde{x} W}{\sum W}$, etc. - **Centroid (Area):** $\bar{x} = \frac{\sum \tilde{x} A}{\sum A}$, $\bar{y} = \frac{\sum \tilde{y} A}{\sum A}$ - **Area Moment of Inertia:** $I_x = \int y^2 dA$, $I_y = \int x^2 dA$ - **Parallel-Axis Theorem:** $I = \bar{I} + Ad^2$ - **Mass Moment of Inertia:** $I = \int r^2 dm$ ### Kinematics of a Particle - **Rectilinear Motion:** - $v = \frac{ds}{dt}$, $a = \frac{dv}{dt} = v\frac{dv}{ds}$ - Constant $a_c$: $v = v_0 + a_c t$, $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$, $v^2 = v_0^2 + 2 a_c (s - s_0)$ - **Curvilinear Motion:** - **Rectangular:** $\vec{v} = \dot{x}\hat{i} + \dot{y}\hat{j} + \dot{z}\hat{k}$, $\vec{a} = \ddot{x}\hat{i} + \ddot{y}\hat{j} + \ddot{z}\hat{k}$ - **Normal-Tangential:** $\vec{a} = a_t\hat{u}_t + a_n\hat{u}_n$, where $a_t = \dot{v}$ and $a_n = \frac{v^2}{\rho}$ - **Cylindrical:** $\vec{v} = \dot{r}\hat{u}_r + r\dot{\theta}\hat{u}_\theta + \dot{z}\hat{k}$ $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\hat{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{u}_\theta + \ddot{z}\hat{k}$ ### Kinetics of a Particle - **Newton's 2nd Law:** $\sum \vec{F} = m\vec{a}$ - Rectangular: $\sum F_x = m a_x$, etc. - Normal-Tangential: $\sum F_t = m a_t$, $\sum F_n = m \frac{v^2}{\rho}$ - **Work & Energy:** $U_{1-2} = \int \vec{F} \cdot d\vec{r}$ - $T_1 + U_{1-2} = T_2$ (Work-Energy Principle) where $T = \frac{1}{2} m v^2$ - $T_1 + V_1 = T_2 + V_2$ (Conservation of Energy) where $V_g = W y$, $V_e = \frac{1}{2} k s^2$ - **Impulse & Momentum:** - $m\vec{v}_1 + \sum \int \vec{F} dt = m\vec{v}_2$ (Linear Impulse-Momentum) - $\sum (m\vec{v})_1 = \sum (m\vec{v})_2$ (Conservation of Linear Momentum) - **Impact:** Coefficient of Restitution $e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1}$ - Angular Momentum: $\vec{H}_O = \vec{r} \times m\vec{v}$ ### Kinematics of a Rigid Body (Plane Motion) - **Rotation about Fixed Axis:** - $\omega = \frac{d\theta}{dt}$, $\alpha = \frac{d\omega}{dt}$ - $v = \omega r$, $a_t = \alpha r$, $a_n = \omega^2 r$ - **General Plane Motion (Absolute):** - $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$ - $\vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} + \vec{\omega} \times (\vec{\omega} \times \vec{r}_{B/A})$ - **Relative Motion (Rotating Axes):** - Coriolis Acceleration: $2\vec{\Omega} \times (\vec{v}_{B/A})_{xyz}$ ### Kinetics of a Rigid Body (Plane Motion) - **Equations of Motion:** - $\sum F_x = m(\bar{a}_G)_x$ - $\sum F_y = m(\bar{a}_G)_y$ - $\sum M_G = \bar{I}_G \alpha$ - **Work & Energy:** $T = \frac{1}{2} m \bar{v}_G^2 + \frac{1}{2} \bar{I}_G \omega^2$ - $T_1 + U_{1-2} = T_2$ - **Impulse & Momentum:** - Linear: $m(\vec{v}_G)_1 + \sum \int \vec{F} dt = m(\vec{v}_G)_2$ - Angular (about G): $\bar{I}_G \omega_1 + \sum \int M_G dt = \bar{I}_G \omega_2$ ### Vibrations (Undamped Free) - **Spring-Mass:** $m\ddot{x} + kx = 0$ - Natural frequency: $\omega_n = \sqrt{\frac{k}{m}}$ rad/s - Period: $\tau = \frac{2\pi}{\omega_n}$ - **Torsional:** $I\ddot{\theta} + K\theta = 0$ - Natural frequency: $\omega_n = \sqrt{\frac{K}{I}}$ rad/s