Mechanics Formulas
Cheatsheet Content
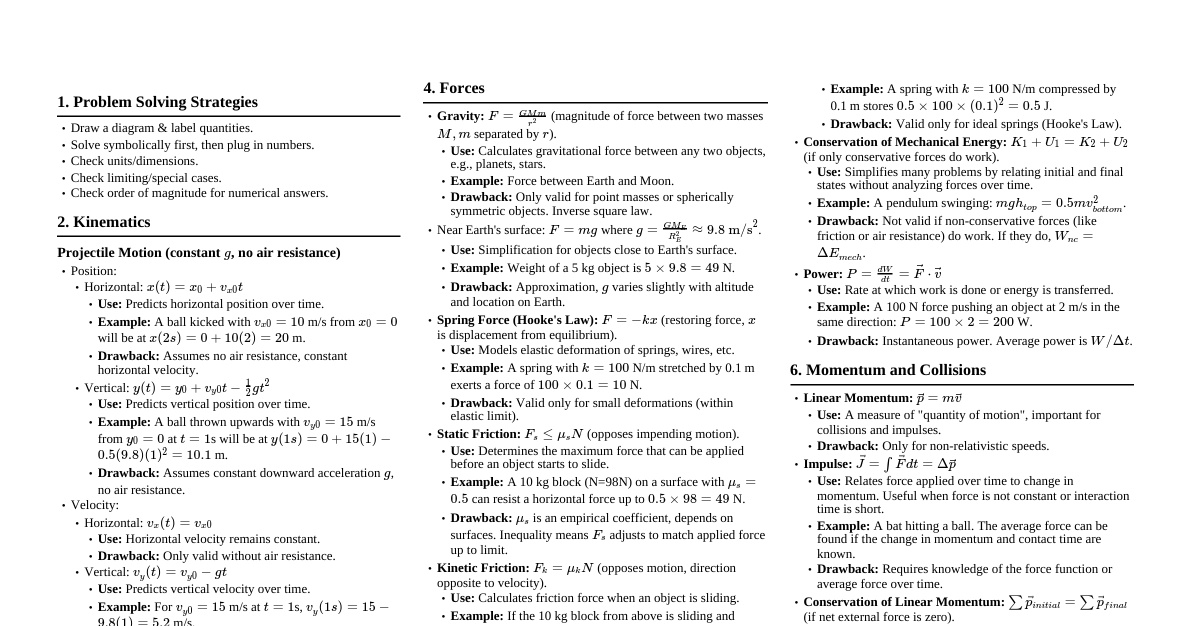
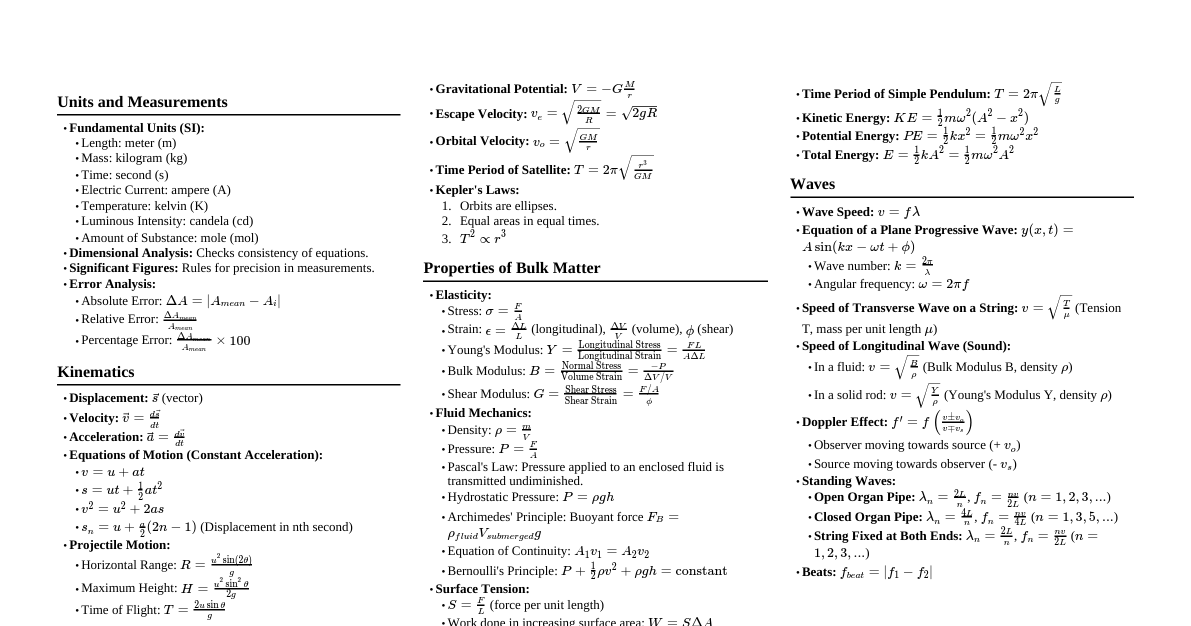
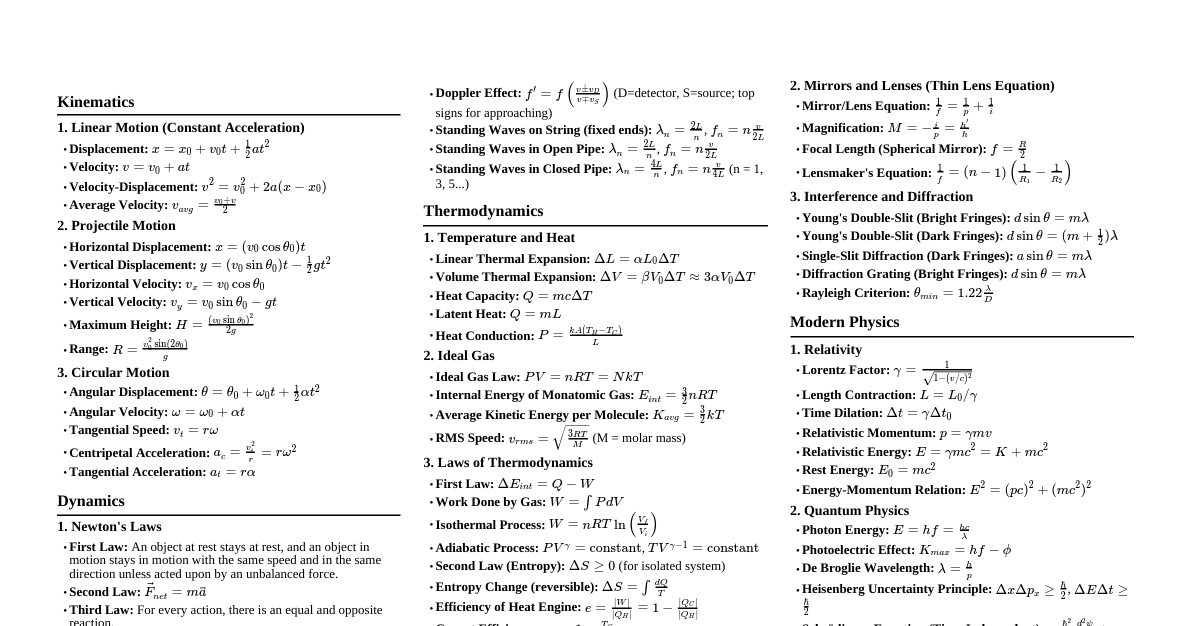
### Kinematics #### 1. Constant Acceleration - **Velocity:** $v = v_0 + at$ - **Position:** $x = x_0 + v_0t + \frac{1}{2}at^2$ - **Velocity-Position:** $v^2 = v_0^2 + 2a(x - x_0)$ - **Average Velocity:** $v_{avg} = \frac{v_0 + v}{2}$ #### 2. Projectile Motion (ignoring air resistance) - **Horizontal Position:** $x = v_{0x}t$ - **Vertical Position:** $y = v_{0y}t - \frac{1}{2}gt^2$ - **Vertical Velocity:** $v_y = v_{0y} - gt$ - **Range:** $R = \frac{v_0^2 \sin(2\theta)}{g}$ - **Max Height:** $H = \frac{v_0^2 \sin^2(\theta)}{2g}$ ### Dynamics #### 1. Newton's Laws - **Newton's First Law:** An object at rest stays at rest, and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. - **Newton's Second Law:** $\vec{F}_{net} = m\vec{a}$ - **Newton's Third Law:** For every action, there is an equal and opposite reaction. #### 2. Forces - **Weight:** $W = mg$ - **Friction Force:** - Static: $f_s \le \mu_s N$ - Kinetic: $f_k = \mu_k N$ - **Centripetal Force:** $F_c = \frac{mv^2}{r} = m\omega^2 r$ - **Hooke's Law (Spring Force):** $F_s = -kx$ ### Work, Energy, and Power #### 1. Work - **Constant Force:** $W = \vec{F} \cdot \vec{d} = Fd\cos\theta$ - **Variable Force:** $W = \int \vec{F} \cdot d\vec{r}$ #### 2. Energy - **Kinetic Energy:** $K = \frac{1}{2}mv^2$ - **Gravitational Potential Energy:** $U_g = mgh$ - **Elastic Potential Energy:** $U_s = \frac{1}{2}kx^2$ - **Work-Energy Theorem:** $W_{net} = \Delta K$ - **Conservation of Mechanical Energy:** $E = K + U = \text{constant (if only conservative forces do work)}$ #### 3. Power - **Average Power:** $P_{avg} = \frac{W}{\Delta t}$ - **Instantaneous Power:** $P = \vec{F} \cdot \vec{v}$ ### Momentum and Impulse #### 1. Momentum - **Linear Momentum:** $\vec{p} = m\vec{v}$ - **Conservation of Linear Momentum:** $\vec{p}_{total, initial} = \vec{p}_{total, final}$ (for isolated system) #### 2. Impulse - **Impulse:** $\vec{J} = \int \vec{F} dt = \vec{F}_{avg}\Delta t$ - **Impulse-Momentum Theorem:** $\vec{J} = \Delta \vec{p}$ #### 3. Collisions - **Elastic Collision:** Kinetic energy is conserved. - **Inelastic Collision:** Kinetic energy is not conserved. - **Perfectly Inelastic Collision:** Objects stick together after collision. ### Rotational Motion #### 1. Kinematics - **Angular Displacement:** $\Delta\theta$ - **Angular Velocity:** $\omega = \frac{d\theta}{dt}$ - **Angular Acceleration:** $\alpha = \frac{d\omega}{dt}$ - **Constant Angular Acceleration:** - $\omega = \omega_0 + \alpha t$ - $\theta = \theta_0 + \omega_0 t + \frac{1}{2}\alpha t^2$ - $\omega^2 = \omega_0^2 + 2\alpha(\theta - \theta_0)$ #### 2. Dynamics - **Torque:** $\vec{\tau} = \vec{r} \times \vec{F} = rF\sin\phi$ - **Newton's Second Law for Rotation:** $\vec{\tau}_{net} = I\vec{\alpha}$ - **Moment of Inertia:** $I = \sum m_i r_i^2 = \int r^2 dm$ - **Rotational Kinetic Energy:** $K_{rot} = \frac{1}{2}I\omega^2$ - **Angular Momentum:** $\vec{L} = I\vec{\omega} = \vec{r} \times \vec{p}$ - **Conservation of Angular Momentum:** $\vec{L}_{total, initial} = \vec{L}_{total, final}$ (for isolated system)