Linear Algebra Essentials
Cheatsheet Content
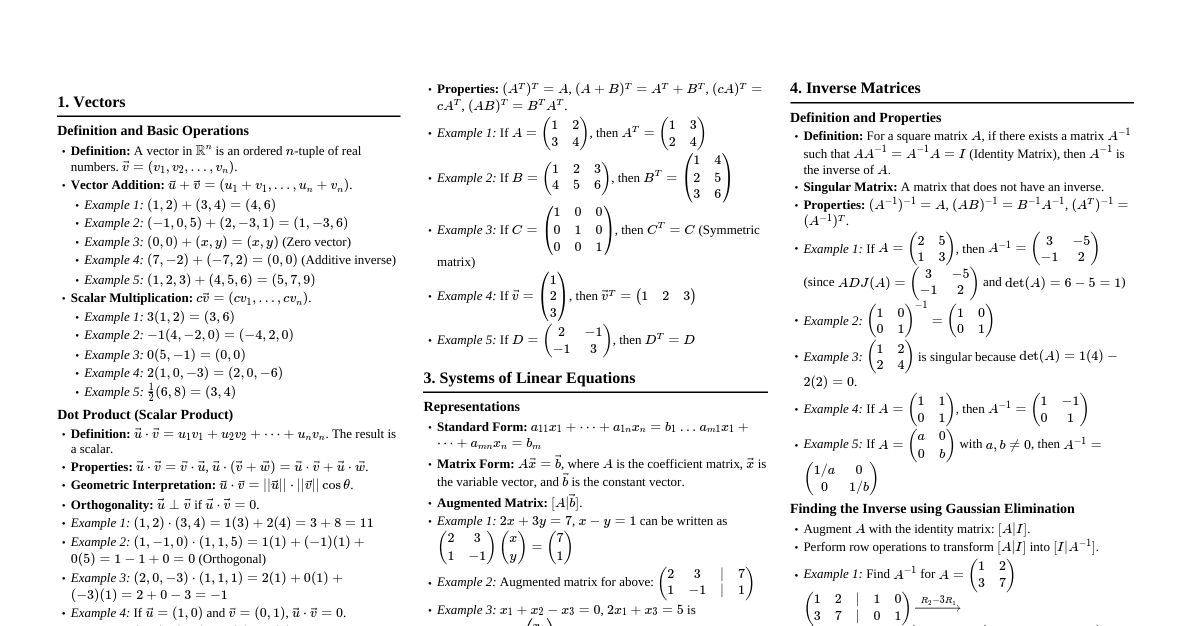
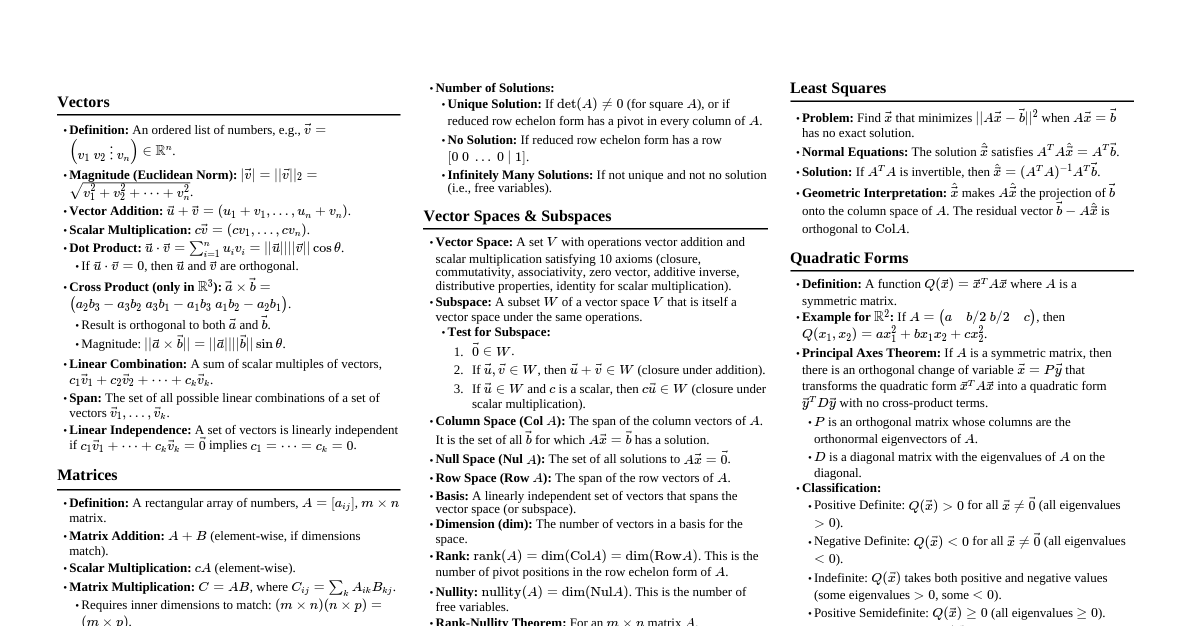
1. ভেক্টর (Vectors) সংজ্ঞা: একটি ভেক্টর হলো একটি পরিমাণ যার মান (magnitude) এবং দিক (direction) উভয়ই আছে। এটি একটি ক্রমিক তালিকা হিসাবে উপস্থাপন করা যেতে পারে, যেমন $v = (v_1, v_2, ..., v_n)$। ভেক্টর যোগ: $u + v = (u_1+v_1, u_2+v_2, ..., u_n+v_n)$ স্কেলার গুণ: $c \cdot v = (c v_1, c v_2, ..., c v_n)$ ডট গুণ (Dot Product): $u \cdot v = u_1 v_1 + u_2 v_2 + ... + u_n v_n = ||u|| \cdot ||v|| \cos(\theta)$ ভেক্টরের দৈর্ঘ্য (Magnitude): $||v|| = \sqrt{v_1^2 + v_2^2 + ... + v_n^2}$ ইউনিট ভেক্টর: $\hat{v} = \frac{v}{||v||}$ (দৈর্ঘ্য 1 এর ভেক্টর) অর্থোগোনাল ভেক্টর: যদি $u \cdot v = 0$ হয়, তবে $u$ এবং $v$ অর্থোগোনাল। 2. ম্যাট্রিক্স (Matrices) সংজ্ঞা: ম্যাট্রিক্স হলো সংখ্যাগুলির একটি আয়তাকার বিন্যাস। একটি $m \times n$ ম্যাট্রিক্সের $m$ সারি এবং $n$ কলাম থাকে। $$ A = \begin{pmatrix} a_{11} & a_{12} & \dots & a_{1n} \\ a_{21} & a_{22} & \dots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \dots & a_{mn} \end{pmatrix} $$ ম্যাট্রিক্স যোগ: $(A+B)_{ij} = A_{ij} + B_{ij}$ (একই আকারের ম্যাট্রিক্সের জন্য) স্কেলার গুণ: $(cA)_{ij} = c \cdot A_{ij}$ ম্যাট্রিক্স গুণ: $(AB)_{ij} = \sum_{k=1}^p A_{ik} B_{kj}$ (যদি $A$ $m \times p$ এবং $B$ $p \times n$ হয়, তবে $AB$ $m \times n$ হবে) ট্রান্সপোজ (Transpose): $A^T$ এর $(i,j)$-তম উপাদান হলো $A_{ji}$। $(AB)^T = B^T A^T$ আইডেন্টিটি ম্যাট্রিক্স (Identity Matrix): $I_n$ হলো একটি $n \times n$ ম্যাট্রিক্স যেখানে প্রধান কর্ণের উপাদানগুলো $1$ এবং বাকিগুলো $0$। $AI = IA = A$ ইনভার্স ম্যাট্রিক্স (Inverse Matrix): যদি $A$ একটি বর্গ ম্যাট্রিক্স হয় এবং $AB = BA = I$ এমন একটি ম্যাট্রিক্স $B$ থাকে, তবে $B$ হলো $A$ এর ইনভার্স, যাকে $A^{-1}$ দ্বারা চিহ্নিত করা হয়। $A^{-1} = \frac{1}{\det(A)} \text{adj}(A)$ সিঙ্গুলার ম্যাট্রিক্স: যদি $\det(A) = 0$ হয়, তবে $A$ এর কোনো ইনভার্স নেই। 3. নির্ণায়ক (Determinants) সংজ্ঞা: একটি বর্গ ম্যাট্রিক্সের একটি স্কেলার মান। $\det(A)$ বা $|A|$ দ্বারা চিহ্নিত করা হয়। $2 \times 2$ ম্যাট্রিক্সের জন্য: যদি $A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$, তবে $\det(A) = ad - bc$ $3 \times 3$ ম্যাট্রিক্সের জন্য (সাররুস নিয়ম): $$ \det \begin{pmatrix} a & b & c \\ d & e & f \\ g & h & i \end{pmatrix} = a(ei-fh) - b(di-fg) + c(dh-eg) $$ ধর্মাবলী: $\det(A^T) = \det(A)$ $\det(AB) = \det(A) \det(B)$ $\det(A^{-1}) = \frac{1}{\det(A)}$ যদি একটি সারিতে বা কলামে সব উপাদান $0$ হয়, তবে $\det(A)=0$। যদি দুটি সারি বা কলাম একই হয়, তবে $\det(A)=0$। 4. রৈখিক সমীকরণ সিস্টেম (Systems of Linear Equations) সাধারণ রূপ: $$ \begin{aligned} a_{11}x_1 + \dots + a_{1n}x_n &= b_1 \\ \vdots \\ a_{m1}x_1 + \dots + a_{mn}x_n &= b_m \end{aligned} $$ ম্যাট্রিক্স রূপ: $Ax = b$, যেখানে $A$ হলো সহগ ম্যাট্রিক্স, $x$ হলো ভ্যারিয়েবল ভেক্টর, এবং $b$ হলো ধ্রুবক ভেক্টর। সমাধানের প্রকারভেদ: একক সমাধান (Unique Solution): যদি $A$ ইনভার্সযোগ্য হয়, $x = A^{-1}b$। অসীম সংখ্যক সমাধান (Infinitely Many Solutions): যদি সিস্টেমটি সামঞ্জস্যপূর্ণ (consistent) হয় এবং $A$ এর নাল স্পেস (null space) অ-শূন্য হয়। কোনো সমাধান নেই (No Solution): যদি সিস্টেমটি অসামঞ্জস্যপূর্ণ (inconsistent) হয়। গাউসিয়ান এলিমিনেশন (Gaussian Elimination): ম্যাট্রিক্সকে রো-একিলন ফর্মে (row-echelon form) রূপান্তর করে সমাধান করা। ক্রেমারের নিয়ম (Cramer's Rule): $x_i = \frac{\det(A_i)}{\det(A)}$, যেখানে $A_i$ হলো $A$ ম্যাট্রিক্সের $i$-তম কলামকে $b$ ভেক্টর দ্বারা প্রতিস্থাপন করে প্রাপ্ত ম্যাট্রিক্স। (শুধুমাত্র যদি $\det(A) \ne 0$) 5. ভেক্টর স্পেস এবং সাবস্পেস (Vector Spaces and Subspaces) ভেক্টর স্পেস: একটি সেট $V$ (যার উপাদানগুলো ভেক্টর) একটি ফিল্ড $F$ (যেমন বাস্তব সংখ্যা $\mathbb{R}$) এর উপর একটি ভেক্টর স্পেস যদি এটি ভেক্টর যোগ এবং স্কেলার গুণের অধীনে কিছু স্বতঃসিদ্ধ (axioms) পূরণ করে। সাবস্পেস: $W$ হলো $V$ এর একটি সাবস্পেস যদি $W$ নিজেই $V$ এর একই অপারেশনগুলির অধীনে একটি ভেক্টর স্পেস হয়। $W$ একটি সাবস্পেস যদি: শূন্য ভেক্টর $0 \in W$ $u, v \in W \implies u+v \in W$ (যোগের অধীনে বদ্ধ) $c \in F, u \in W \implies cu \in W$ (স্কেলার গুণের অধীনে বদ্ধ) স্প্যান (Span): ভেক্টরগুলির একটি সেট $S = \{v_1, ..., v_k\}$ এর স্প্যান হলো এই ভেক্টরগুলির সমস্ত রৈখিক সংমিশ্রণের সেট। $\text{span}(S) = \{c_1v_1 + ... + c_kv_k \mid c_i \in F\}$ রৈখিক স্বাধীনতা (Linear Independence): ভেক্টরগুলির একটি সেট $\{v_1, ..., v_k\}$ রৈখিকভাবে স্বাধীন যদি $c_1v_1 + ... + c_kv_k = 0$ এর একমাত্র সমাধান $c_1 = ... = c_k = 0$ হয়। ভেক্টর স্পেসের ভিত্তি (Basis): একটি ভেক্টর স্পেস $V$ এর ভিত্তি হলো ভেক্টরগুলির একটি রৈখিকভাবে স্বাধীন সেট যা $V$ কে স্প্যান করে। মাত্রা (Dimension): একটি ভেক্টর স্পেসের মাত্রা হলো এর ভিত্তির ভেক্টরের সংখ্যা। 6. রৈখিক রূপান্তর (Linear Transformations) সংজ্ঞা: একটি ফাংশন $T: V \to W$ (যেখানে $V, W$ ভেক্টর স্পেস) একটি রৈখিক রূপান্তর যদি: $T(u+v) = T(u) + T(v)$ (যোগশীলতা) $T(cu) = cT(u)$ (সমজাতীয়তা) কার্নেল/নাল স্পেস (Kernel/Null Space): $\text{ker}(T) = \{v \in V \mid T(v) = 0_W\}$। এটি $V$ এর একটি সাবস্পেস। রেঞ্জ/ইমেজ (Range/Image): $\text{Im}(T) = \{T(v) \mid v \in V\}$। এটি $W$ এর একটি সাবস্পেস। র্যাঙ্ক-নালিটি উপপাদ্য (Rank-Nullity Theorem): $\dim(\text{ker}(T)) + \dim(\text{Im}(T)) = \dim(V)$ ম্যাট্রিক্স রূপান্তর: প্রতিটি রৈখিক রূপান্তরকে একটি ম্যাট্রিক্স দ্বারা উপস্থাপন করা যেতে পারে। যদি $T(x) = Ax$ হয়, তবে $A$ হলো রূপান্তরের ম্যাট্রিক্স। 7. আইগেনভ্যালু এবং আইগেনভেক্টর (Eigenvalues and Eigenvectors) সংজ্ঞা: একটি বর্গ ম্যাট্রিক্স $A$ এর জন্য, একটি অ-শূন্য ভেক্টর $v$ হলো একটি আইগেনভেক্টর যদি $Av = \lambda v$ হয়, যেখানে $\lambda$ হলো একটি স্কেলার যাকে আইগেনভ্যালু বলা হয়। আইগেনভ্যালু নির্ণয়: বৈশিষ্ট্যপূর্ণ সমীকরণ (characteristic equation) $\det(A - \lambda I) = 0$ সমাধান করে আইগেনভ্যালু $\lambda$ নির্ণয় করা হয়। আইগেনভেক্টর নির্ণয়: প্রতিটি $\lambda$ এর জন্য, $(A - \lambda I)v = 0$ সমাধান করে সংশ্লিষ্ট আইগেনভেক্টর $v$ নির্ণয় করা হয়। ডায়াগোনালাইজেশন (Diagonalization): একটি ম্যাট্রিক্স $A$ ডায়াগোনালাইজেবল যদি এটি $P D P^{-1}$ আকারে লেখা যায়, যেখানে $D$ হলো আইগেনভ্যালু সহ একটি ডায়াগোনাল ম্যাট্রিক্স এবং $P$ হলো আইগেনভেক্টরগুলির কলাম সহ একটি ম্যাট্রিক্স। এটি সম্ভব যদি $A$ এর পর্যাপ্ত রৈখিকভাবে স্বাধীন আইগেনভেক্টর থাকে। 8. অর্থোগোনালিটি এবং প্রজেকশন (Orthogonality and Projections) অর্থোগোনাল সেট: ভেক্টরগুলির একটি সেট $\{v_1, ..., v_k\}$ অর্থোগোনাল যদি $v_i \cdot v_j = 0$ যখন $i \ne j$ হয়। অর্থোনরমাল সেট: একটি অর্থোগোনাল সেট যেখানে প্রতিটি ভেক্টরের দৈর্ঘ্য $1$। অর্থোগোনাল ম্যাট্রিক্স: একটি বর্গ ম্যাট্রিক্স $Q$ অর্থোগোনাল যদি $Q^T Q = I$ হয়, যার অর্থ $Q^{-1} = Q^T$। অর্থোগোনাল প্রজেকশন: একটি ভেক্টর $y$ কে একটি সাবস্পেস $W$ এর উপর প্রজেকশন করা: $$ \text{proj}_W y = \frac{y \cdot v_1}{v_1 \cdot v_1} v_1 + \dots + \frac{y \cdot v_k}{v_k \cdot v_k} v_k $$ (যেখানে $\{v_1, ..., v_k\}$ হলো $W$ এর একটি অর্থোগোনাল ভিত্তি) গ্রাম-স্মিট প্রক্রিয়া (Gram-Schmidt Process): একটি রৈখিকভাবে স্বাধীন সেটকে একটি অর্থোগোনাল বা অর্থোনরমাল সেটে রূপান্তর করার পদ্ধতি।