Mechanics Cheatsheet
Cheatsheet Content
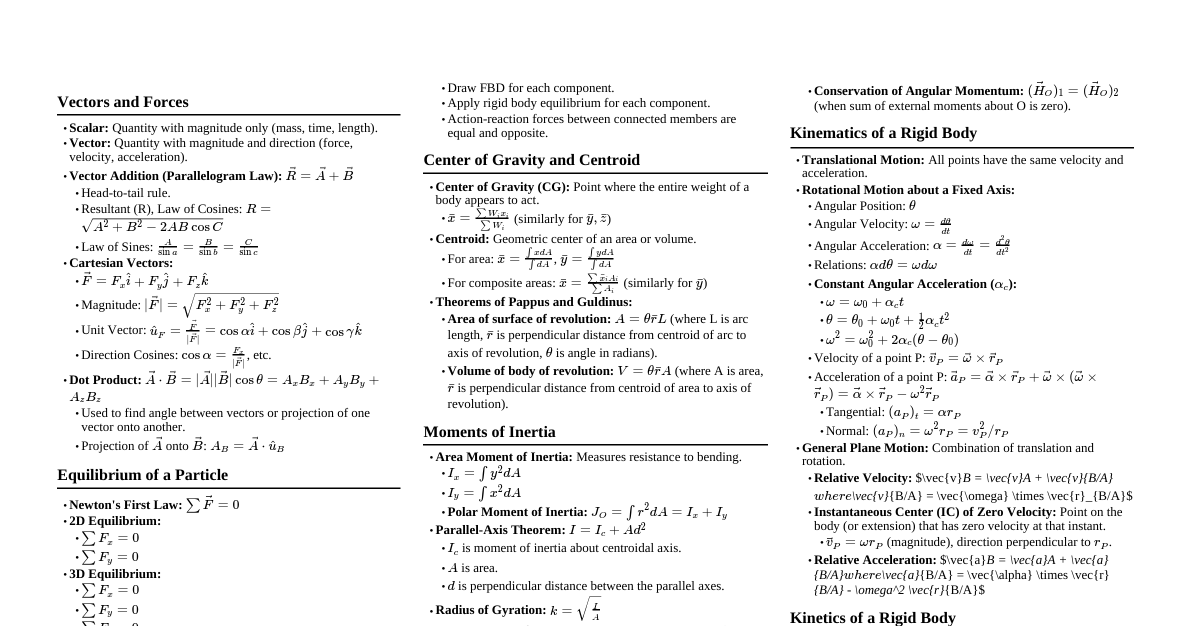
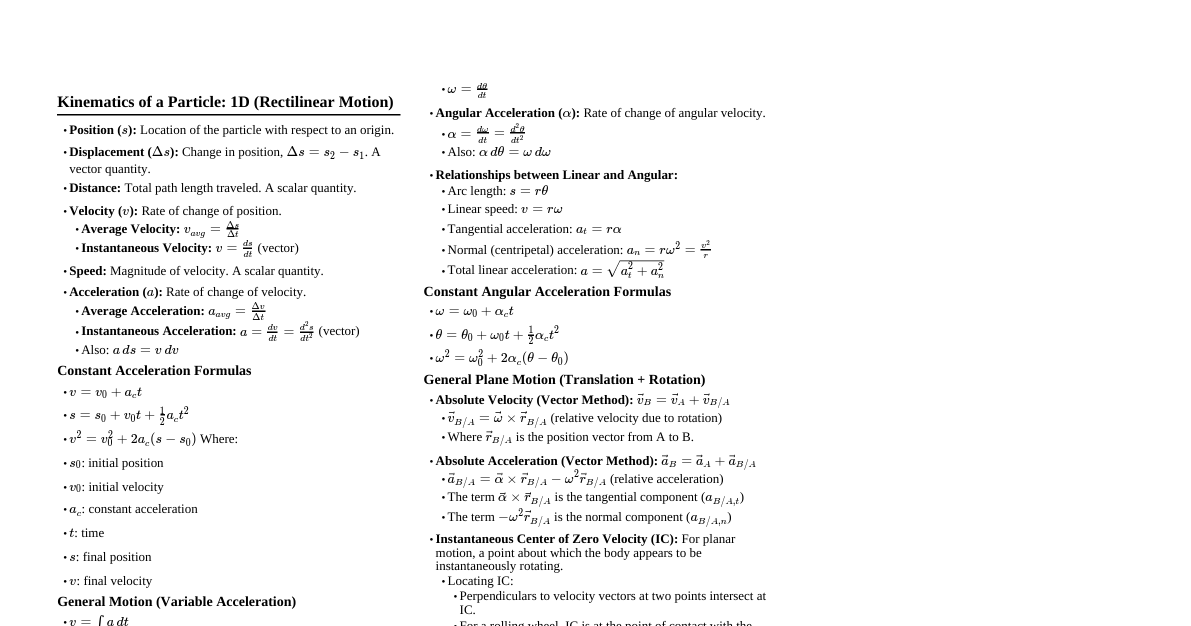
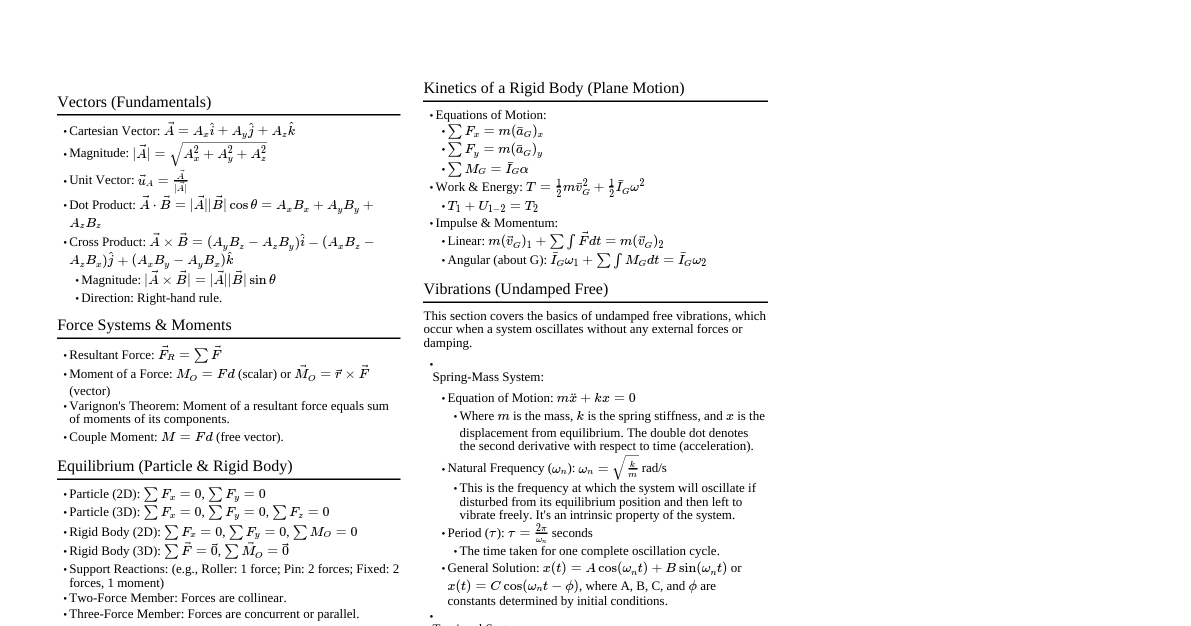
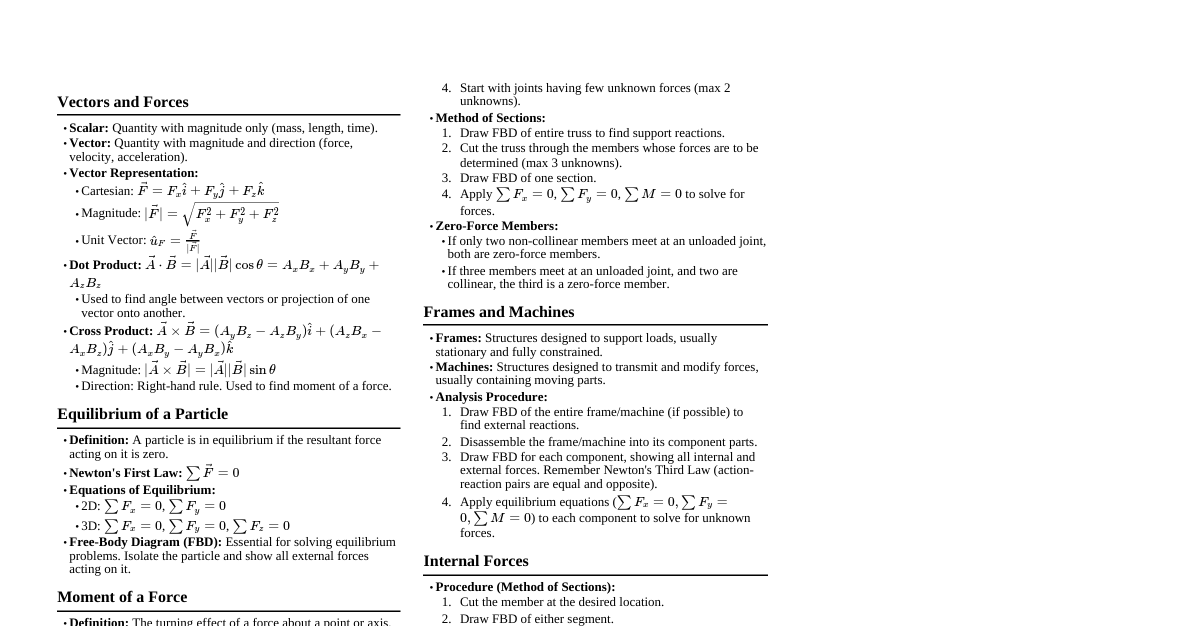
### Fundamental Principles - **Newton's First Law:** An object at rest stays at rest and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. - **Newton's Second Law:** $\sum \vec{F} = m\vec{a}$ (sum of forces equals mass times acceleration). This is the cornerstone of dynamics. - **Newton's Third Law:** For every action, there is an equal and opposite reaction. Forces always occur in pairs. - **Gravitational Law:** $F = G \frac{m_1 m_2}{r^2}$, where $G = 66.73 \times 10^{-12} \text{ m}^3/(\text{kg}\cdot\text{s}^2)$. On Earth's surface, weight $W = mg$. - **Units (SI):** Length (m), Mass (kg), Time (s), Force (N). $1 \text{ N} = 1 \text{ kg} \cdot \text{m}/\text{s}^2$. - **Units (US Customary):** Length (ft), Force (lb), Time (s), Mass (slug). $1 \text{ slug} = 1 \text{ lb} \cdot \text{s}^2/\text{ft}$. ### Force Vectors - **Scalar:** Quantity with magnitude (e.g., mass, length, time). - **Vector:** Quantity with both magnitude and direction (e.g., force, velocity, acceleration). - **Vector Addition (Parallelogram Law):** To add two vectors $\vec{A}$ and $\vec{B}$, place their tails at the same point and form a parallelogram. The resultant vector $\vec{R}$ is the diagonal from the common tail. - **Vector Resolution:** Decomposing a vector into its components. For a 2D vector $\vec{F}$ at angle $\theta$ with x-axis: - $F_x = F \cos\theta$ - $F_y = F \sin\theta$ - Magnitude: $F = \sqrt{F_x^2 + F_y^2}$ - Direction: $\theta = \arctan(F_y/F_x)$ - **Cartesian Vector Representation:** - $\vec{F} = F_x \hat{i} + F_y \hat{j} + F_z \hat{k}$ - Unit vector: $\vec{u}_F = \frac{\vec{F}}{F}$ - **Dot Product:** $\vec{A} \cdot \vec{B} = AB \cos\theta = A_x B_x + A_y B_y + A_z B_z$. Used to find the angle between two vectors or the projection of one vector onto another. - Projection of $\vec{A}$ onto $\vec{B}$: $A_B = \vec{A} \cdot \vec{u}_B$ ### Equilibrium of a Particle - **Condition for Equilibrium:** A particle is in equilibrium if the resultant of all forces acting on it is zero. - $\sum \vec{F} = 0$ - In Cartesian components: - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum F_z = 0$ - **Free-Body Diagram (FBD):** Essential for solving equilibrium problems. 1. Isolate the particle. 2. Show all external forces acting on the particle (gravity, tension, normal force, applied forces). 3. Label known and unknown magnitudes and directions. ### Moment of a Force and Couples - **Moment (Torque) about a Point:** Measures the tendency of a force to rotate a body about a point or axis. - Scalar: $M_O = Fd$, where $d$ is the perpendicular distance from the point $O$ to the line of action of the force (moment arm). - Vector (Cross Product): $\vec{M}_O = \vec{r} \times \vec{F}$, where $\vec{r}$ is the position vector from point $O$ to any point on the line of action of $\vec{F}$. - Magnitude: $|\vec{r} \times \vec{F}| = rF \sin\theta$ - Direction: Right-hand rule. - **Cartesian Vector Formulation for Moment:** $$\vec{M}_O = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ r_x & r_y & r_z \\ F_x & F_y & F_z \end{vmatrix}$$ - **Principle of Transmissibility:** A force can be moved along its line of action without changing its external effect on a rigid body (resultant force and moment). - **Varignon's Theorem:** The moment of a force about a point is equal to the sum of the moments of its components about the same point. - **Moment of a Force about an Axis:** $M_{axis} = \vec{u}_{axis} \cdot (\vec{r} \times \vec{F})$, where $\vec{u}_{axis}$ is the unit vector along the axis. - **Couple:** Two parallel forces that are equal in magnitude, opposite in direction, and separated by a perpendicular distance $d$. - Resultant force of a couple is zero. - Resultant moment of a couple: $M = Fd$. The moment of a couple is a free vector (independent of moment center). ### Resultants of a Force System - **Resultant Force:** The vector sum of all forces acting on a body: $\vec{F}_R = \sum \vec{F}$. - **Resultant Moment:** The vector sum of all moments about a point (e.g., origin O): $\vec{M}_{RO} = \sum (\vec{r} \times \vec{F}) + \sum \vec{M}_C$ (where $\vec{M}_C$ are couple moments). - **Equivalent System:** A force and couple moment at a point O that produce the same external effect on a rigid body as the original force system. - $\vec{F}_R = \sum \vec{F}$ - $\vec{M}_{RO} = \sum (\vec{r}_i \times \vec{F}_i)$ from each force, plus any existing couples. - **Wrench:** A system where the resultant force and resultant couple moment are parallel. ### Equilibrium of a Rigid Body - **Conditions for Equilibrium:** For a rigid body to be in equilibrium, both the resultant force and resultant couple moment acting on it must be zero. - $\sum \vec{F} = 0$ - $\sum \vec{M}_O = 0$ (sum of moments about any point O) - **Scalar Equations (2D):** - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum M_O = 0$ (moment about any point O in the plane) - **Scalar Equations (3D):** - $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ (moments about x, y, z axes) - **Free-Body Diagram (FBD):** Essential. 1. Draw the isolated body. 2. Show all external forces and couple moments. Identify their points of application and direction. 3. Include support reactions (e.g., roller, pin, fixed support, smooth surface, cable, spring). Each type of support provides specific force/moment reactions. - **Roller:** Force perpendicular to surface. - **Pin (Hinge):** Two force components ($F_x, F_y$). - **Fixed Support (Cantilever):** Two force components ($F_x, F_y$) and a moment ($M_z$). ### Trusses, Frames, and Machines - **Truss:** Structure composed of slender members joined at their ends. Assumed to be pin-connected, and loads applied only at joints. All members are two-force members (tension or compression). - **Method of Joints:** Apply equilibrium $\sum F_x = 0, \sum F_y = 0$ to each joint. - **Method of Sections:** Cut the truss to expose internal forces in specific members. Apply rigid-body equilibrium to a section of the truss. Useful for finding forces in a few specific members. - **Frame:** Structures composed of pin-connected members, but loads can be applied anywhere on the members, and members are not necessarily two-force members. - **Machine:** Designed to transmit or modify forces. Include moving parts. - **Analysis of Frames and Machines:** Disassemble the structure into its individual members. Draw FBD for each member, showing all external loads and internal reaction forces at the pins. Apply rigid-body equilibrium to each member. Remember Newton's Third Law for internal forces at connections. ### Centroids and Center of Gravity - **Center of Gravity (CG):** Point where the entire weight of a body appears to act. - $\bar{x} = \frac{\sum \tilde{x} W}{\sum W}$, $\bar{y} = \frac{\sum \tilde{y} W}{\sum W}$, $\bar{z} = \frac{\sum \tilde{z} W}{\sum W}$ - **Centroid:** Geometric center of an area, volume, or line. If the material is homogeneous, CG coincides with the centroid. - **Area:** $\bar{x} = \frac{\int \tilde{x} dA}{\int dA}$, $\bar{y} = \frac{\int \tilde{y} dA}{\int dA}$ - For composite areas: $\bar{x} = \frac{\sum \tilde{x}_i A_i}{\sum A_i}$, $\bar{y} = \frac{\sum \tilde{y}_i A_i}{\sum A_i}$ - **Theorems of Pappus and Guldinus:** - **Area of surface of revolution:** $A = \theta \bar{r} L$, where $L$ is length of generating curve and $\bar{r}$ is distance from axis of revolution to centroid of curve. $\theta$ in radians. - **Volume of body of revolution:** $V = \theta \bar{r} A$, where $A$ is area of generating region and $\bar{r}$ is distance from axis of revolution to centroid of area. $\theta$ in radians. ### Moments of Inertia - **Moment of Inertia of an Area (Second Moment of Area):** Measures an area's ability to resist bending. - $I_x = \int y^2 dA$ - $I_y = \int x^2 dA$ - For rectangles: $I_x = \frac{1}{12}bh^3$ about centroidal x-axis, $I_y = \frac{1}{12}hb^3$ about centroidal y-axis. - **Polar Moment of Inertia:** $J_O = \int r^2 dA = I_x + I_y$. Measures resistance to torsion. - **Parallel-Axis Theorem:** $I = I_c + Ad^2$, where $I_c$ is the moment of inertia about a centroidal axis parallel to the axis of interest, $A$ is the area, and $d$ is the perpendicular distance between the two axes. - **Radius of Gyration:** $k = \sqrt{I/A}$. Represents the distance from the axis at which the entire area could be concentrated to yield the same moment of inertia. - **Product of Inertia:** $I_{xy} = \int xy dA$. Measures symmetry of an area with respect to the coordinate axes. - **Principal Moments of Inertia:** Maximum and minimum moments of inertia for an area, occurring on principal axes. These axes are defined such that the product of inertia $I_{x'y'}$ is zero. - $\tan 2\theta_p = \frac{-I_{xy}}{(I_x - I_y)/2}$ (angle to principal axes) - $I_{max/min} = \frac{I_x + I_y}{2} \pm \sqrt{\left(\frac{I_x - I_y}{2}\right)^2 + I_{xy}^2}$ ### Friction - **Dry Friction:** Resistance to relative motion between two contacting surfaces. - **Static Friction ($F_s$):** Force that prevents motion. $0 \le F_s \le \mu_s N$, where $\mu_s$ is the coefficient of static friction and $N$ is the normal force. Its maximum value is $\mu_s N$ (impending motion). - **Kinetic Friction ($F_k$):** Force that opposes motion when surfaces are sliding. $F_k = \mu_k N$, where $\mu_k$ is the coefficient of kinetic friction. $\mu_k