Hibbeler Mechanics Cheatsheet
Cheatsheet Content
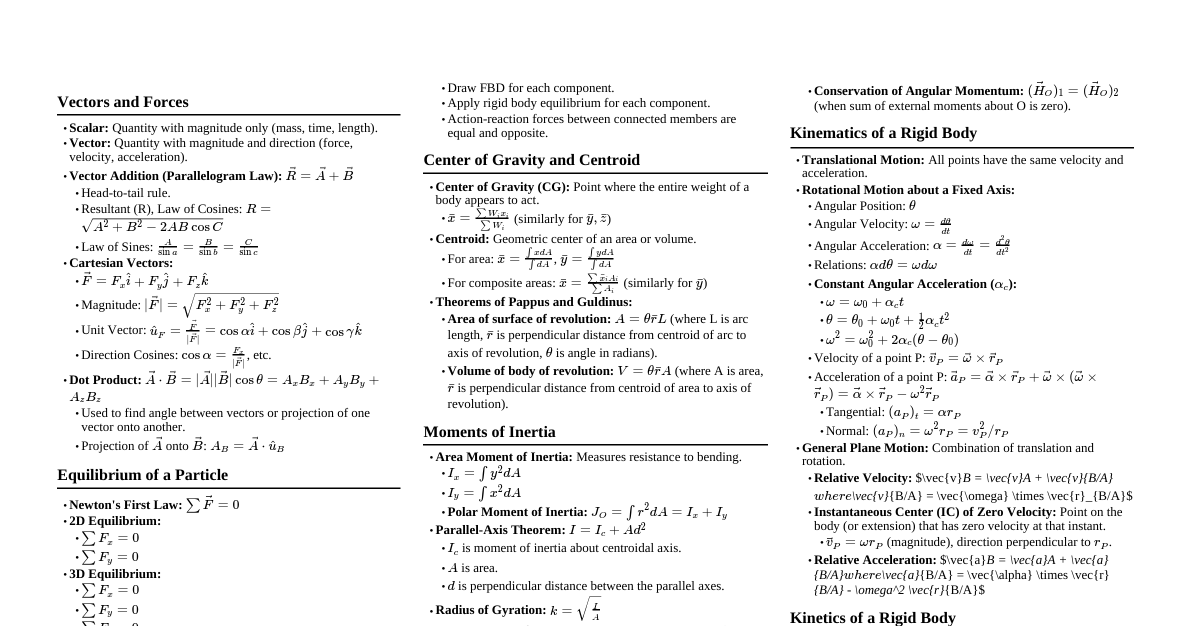
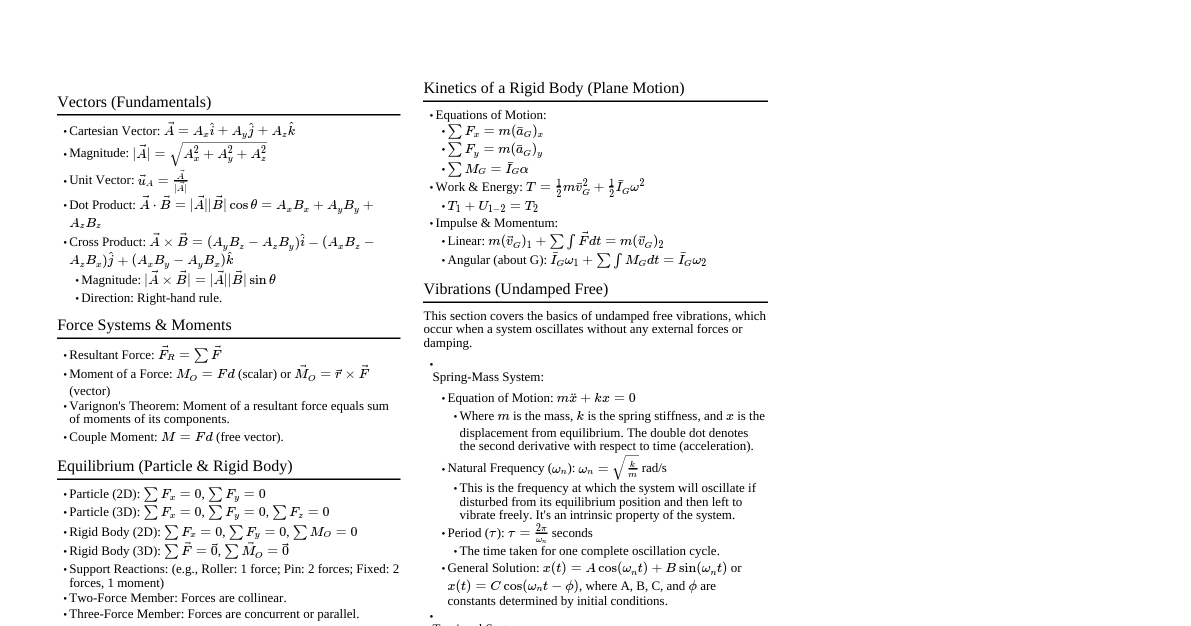
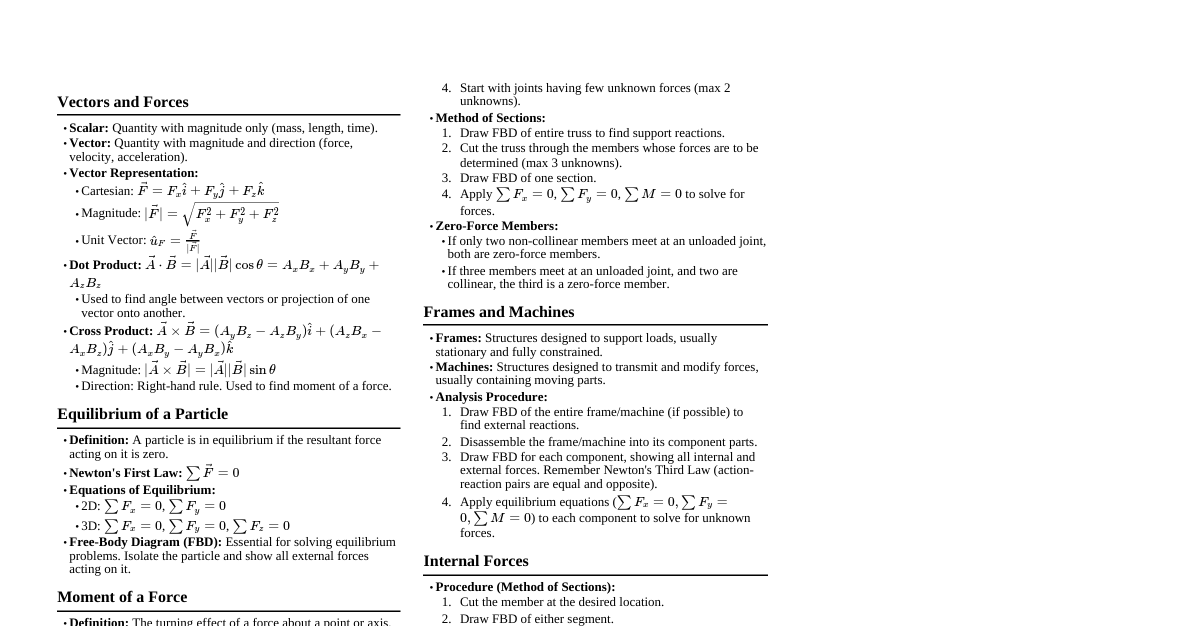
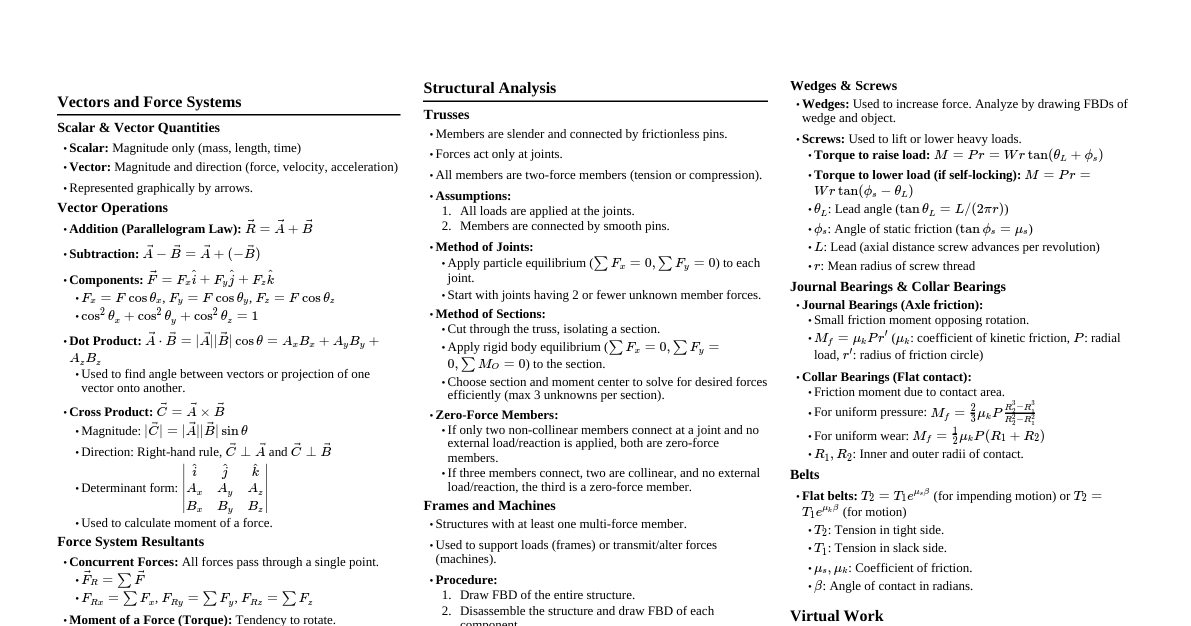
### Kinematics of a Particle: 1D (Rectilinear Motion) - **Position ($s$):** Location of the particle with respect to an origin. - **Displacement ($\Delta s$):** Change in position, $\Delta s = s_2 - s_1$. A vector quantity. - **Distance:** Total path length traveled. A scalar quantity. - **Velocity ($v$):** Rate of change of position. - **Average Velocity:** $v_{avg} = \frac{\Delta s}{\Delta t}$ - **Instantaneous Velocity:** $v = \frac{ds}{dt}$ (vector) - **Speed:** Magnitude of velocity. A scalar quantity. - **Acceleration ($a$):** Rate of change of velocity. - **Average Acceleration:** $a_{avg} = \frac{\Delta v}{\Delta t}$ - **Instantaneous Acceleration:** $a = \frac{dv}{dt} = \frac{d^2s}{dt^2}$ (vector) - Also: $a \,ds = v \,dv$ #### Constant Acceleration Formulas - $v = v_0 + a_c t$ - $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$ - $v^2 = v_0^2 + 2 a_c (s - s_0)$ Where: - $s_0$: initial position - $v_0$: initial velocity - $a_c$: constant acceleration - $t$: time - $s$: final position - $v$: final velocity #### General Motion (Variable Acceleration) - $v = \int a \,dt$ - $s = \int v \,dt$ - For acceleration as a function of position: $a \,ds = v \,dv$ ### Kinematics of a Particle: 2D & 3D (Curvilinear Motion) - **Position Vector:** $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ - **Velocity Vector:** $\vec{v} = \frac{d\vec{r}}{dt} = v_x\hat{i} + v_y\hat{j} + v_z\hat{k}$ - $v_x = \frac{dx}{dt}$, $v_y = \frac{dy}{dt}$, $v_z = \frac{dz}{dt}$ - Speed: $|\vec{v}| = \sqrt{v_x^2 + v_y^2 + v_z^2}$ - **Acceleration Vector:** $\vec{a} = \frac{d\vec{v}}{dt} = a_x\hat{i} + a_y\hat{j} + a_z\hat{k}$ - $a_x = \frac{dv_x}{dt}$, $a_y = \frac{dv_y}{dt}$, $a_z = \frac{dz}{dt}$ - Magnitude: $|\vec{a}| = \sqrt{a_x^2 + a_y^2 + a_z^2}$ #### Projectile Motion (Constant $a_y = -g$, $a_x = 0$) - **Horizontal Motion:** - $v_x = (v_0)_x$ - $x = x_0 + (v_0)_x t$ - **Vertical Motion:** - $v_y = (v_0)_y - g t$ - $y = y_0 + (v_0)_y t - \frac{1}{2} g t^2$ - $v_y^2 = (v_0)_y^2 - 2 g (y - y_0)$ #### Coordinate Systems - **Rectangular (Cartesian):** $(x, y, z)$ - $\vec{v} = \dot{x}\hat{i} + \dot{y}\hat{j} + \dot{z}\hat{k}$ - $\vec{a} = \ddot{x}\hat{i} + \ddot{y}\hat{j} + \ddot{z}\hat{k}$ - **Normal & Tangential (n-t):** Used for path-dependent motion. - $\vec{v} = v \hat{u}_t$ (tangential to path) - $\vec{a} = a_t \hat{u}_t + a_n \hat{u}_n$ - $a_t = \dot{v}$ or $a_t = v \frac{dv}{ds}$ (tangential acceleration, changes speed) - $a_n = \frac{v^2}{\rho}$ (normal acceleration, changes direction, always points towards center of curvature) - $\rho$: radius of curvature, $\rho = \frac{[1 + (dy/dx)^2]^{3/2}}{|d^2y/dx^2|}$ - **Cylindrical (Polar) Coordinates:** $(r, \theta, z)$ - $\vec{r} = r \hat{u}_r + z \hat{k}$ - $\vec{v} = \dot{r} \hat{u}_r + r \dot{\theta} \hat{u}_{\theta} + \dot{z} \hat{k}$ - $\vec{a} = (\ddot{r} - r \dot{\theta}^2) \hat{u}_r + (r \ddot{\theta} + 2 \dot{r} \dot{\theta}) \hat{u}_{\theta} + \ddot{z} \hat{k}$ - $\hat{u}_r$ and $\hat{u}_{\theta}$ are unit vectors. ### Kinematics of a Rigid Body - **Rigid Body:** A body that does not deform. Distances between any two points on the body remain constant. - **Types of Motion:** - **Translation:** All particles in the body have the same velocity and acceleration. - Rectilinear Translation: Straight line path. - Curvilinear Translation: Curved path. - **Rotation about a Fixed Axis:** Particles move in concentric circles. - **General Plane Motion:** Translation + Rotation. #### Rotation about a Fixed Axis - **Angular Position ($\theta$):** Angle measured from a reference line. - **Angular Velocity ($\omega$):** Rate of change of angular position. - $\omega = \frac{d\theta}{dt}$ - **Angular Acceleration ($\alpha$):** Rate of change of angular velocity. - $\alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2}$ - Also: $\alpha \,d\theta = \omega \,d\omega$ - **Relationships between Linear and Angular:** - Arc length: $s = r\theta$ - Linear speed: $v = r\omega$ - Tangential acceleration: $a_t = r\alpha$ - Normal (centripetal) acceleration: $a_n = r\omega^2 = \frac{v^2}{r}$ - Total linear acceleration: $a = \sqrt{a_t^2 + a_n^2}$ #### Constant Angular Acceleration Formulas - $\omega = \omega_0 + \alpha_c t$ - $\theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha_c t^2$ - $\omega^2 = \omega_0^2 + 2 \alpha_c (\theta - \theta_0)$ #### General Plane Motion (Translation + Rotation) - **Absolute Velocity (Vector Method):** $\vec{v}_B = \vec{v}_A + \vec{v}_{B/A}$ - $\vec{v}_{B/A} = \vec{\omega} \times \vec{r}_{B/A}$ (relative velocity due to rotation) - Where $\vec{r}_{B/A}$ is the position vector from A to B. - **Absolute Acceleration (Vector Method):** $\vec{a}_B = \vec{a}_A + \vec{a}_{B/A}$ - $\vec{a}_{B/A} = \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$ (relative acceleration) - The term $\vec{\alpha} \times \vec{r}_{B/A}$ is the tangential component ($a_{B/A,t}$) - The term $-\omega^2 \vec{r}_{B/A}$ is the normal component ($a_{B/A,n}$) - **Instantaneous Center of Zero Velocity (IC):** For planar motion, a point about which the body appears to be instantaneously rotating. - Locating IC: - Perpendiculars to velocity vectors at two points intersect at IC. - For a rolling wheel, IC is at the point of contact with the ground. - Velocity of any point $P$: $v_P = \omega r_{P/IC}$ (where $r_{P/IC}$ is distance from IC to P). ### Relative Motion of Two Particles - **Relative Position:** $\vec{r}_{B/A} = \vec{r}_B - \vec{r}_A$ - **Relative Velocity:** $\vec{v}_{B/A} = \vec{v}_B - \vec{v}_A$ or $\vec{v}_B = \vec{v}_A + \vec{v}_{B/A}$ - **Relative Acceleration:** $\vec{a}_{B/A} = \vec{a}_B - \vec{a}_A$ or $\vec{a}_B = \vec{a}_A + \vec{a}_{B/A}$ - **Key Idea:** All terms must be measured from a common inertial reference frame. - **Example:** If car B is moving relative to car A, $\vec{v}_{B/A}$ is the velocity of B as seen by an observer in A. #### Dependent Motion of Particles - **Constraint Equations:** Relate the positions of various particles using cable lengths, pulley systems, etc. - **Procedure:** 1. Define position coordinates for each moving block/point from a fixed datum. 2. Write an equation relating the total length of the cable(s) to these position coordinates. The total length of the cable is constant. 3. Differentiate the position equation with respect to time to get velocity relationships. 4. Differentiate again to get acceleration relationships. - **Important:** Pay attention to signs for direction. If a coordinate increases, its velocity/acceleration is positive.