Physics Fundamentals
Cheatsheet Content
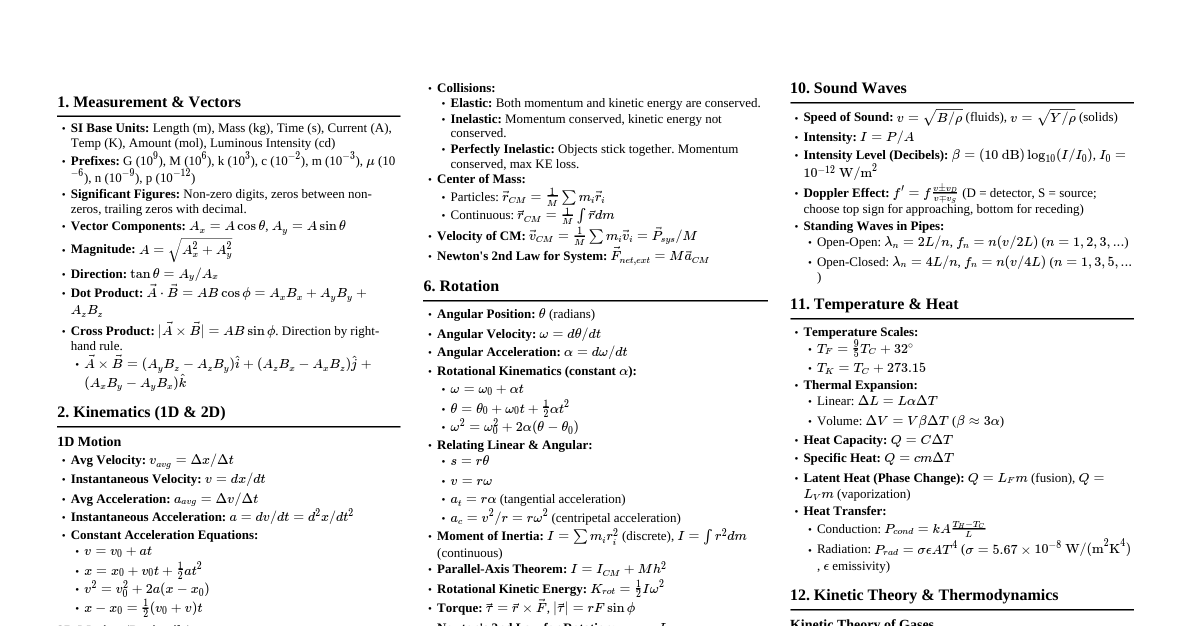
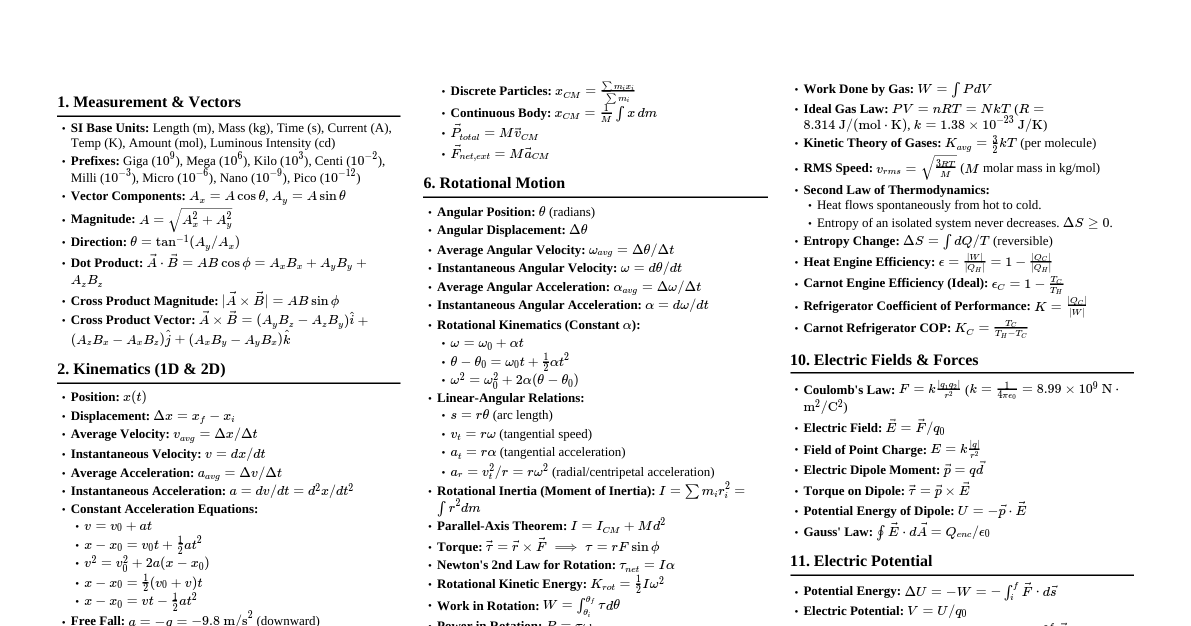
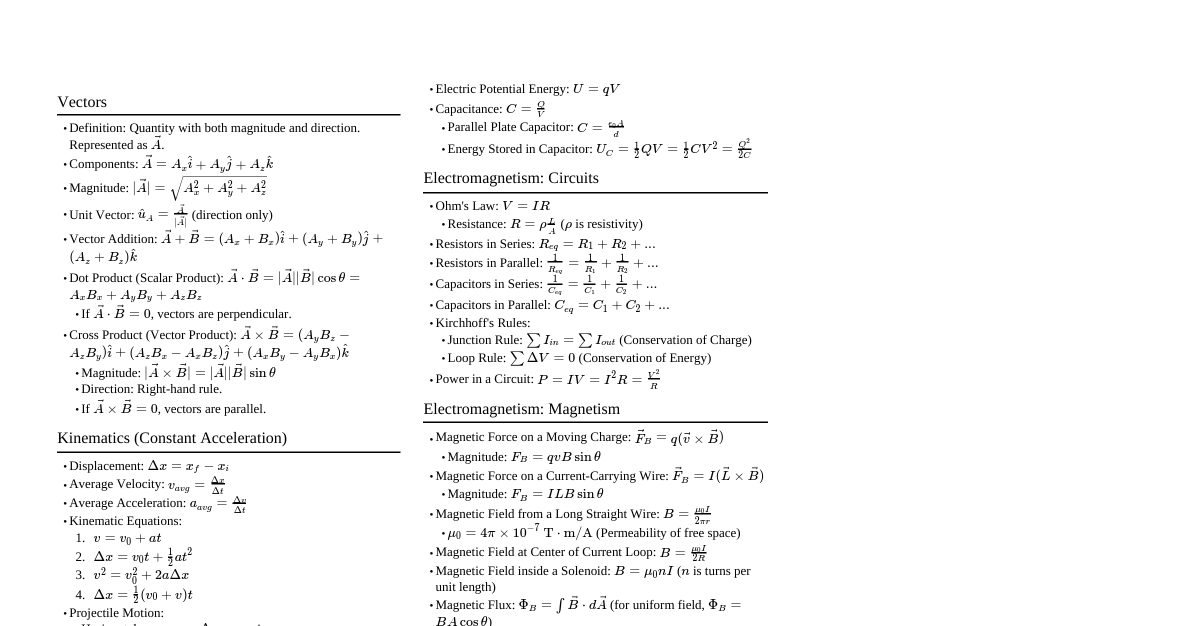
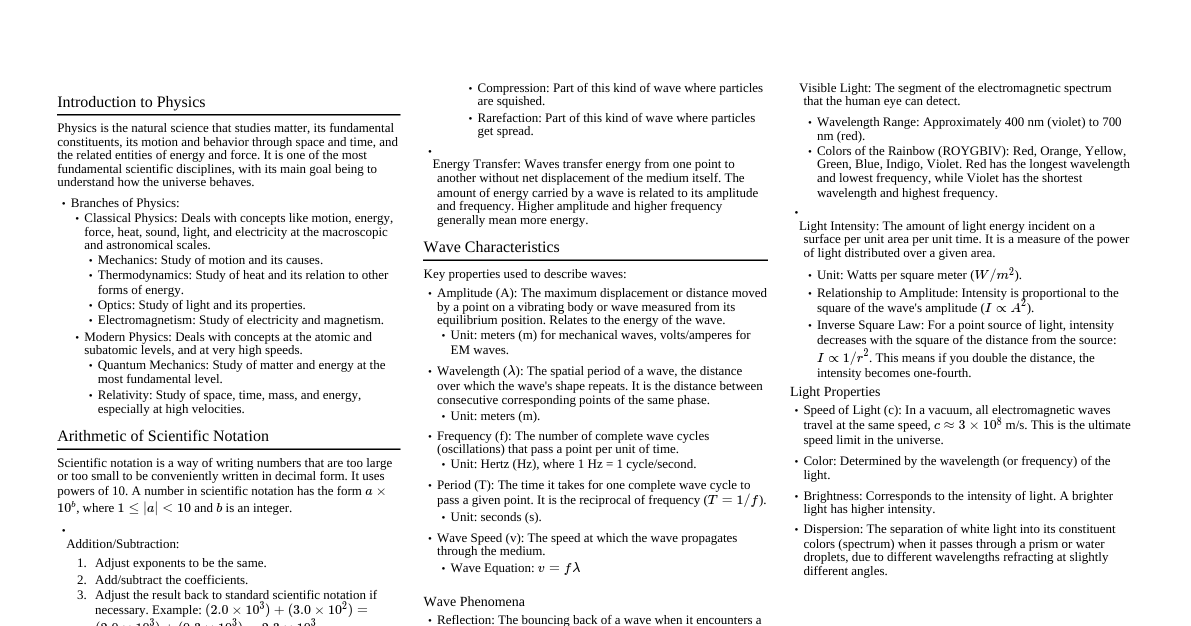
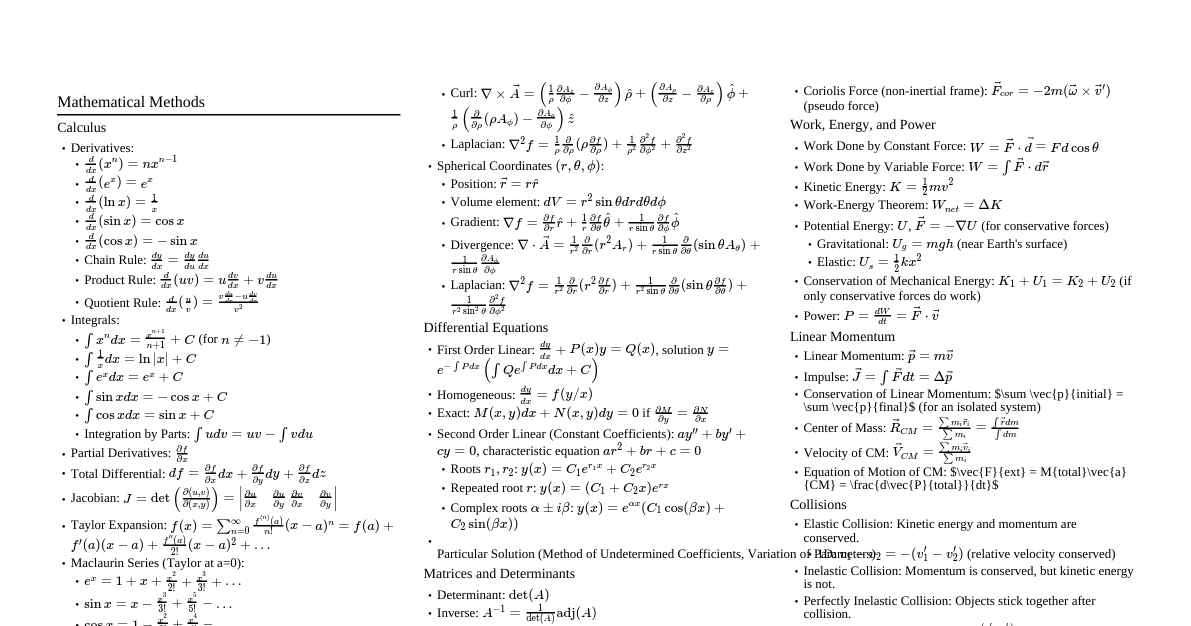
### Kinematics Kinematics is the branch of classical mechanics that describes the motion of points, bodies and systems of bodies without considering the causes of motion. #### 1. Uniform Motion - **Definition:** Motion with constant velocity (zero acceleration). - **Formulas:** - Displacement: $x = x_0 + vt$ - Velocity: $v = \text{constant}$ - Acceleration: $a = 0$ - Derivation: From the definition of constant velocity, $v = \frac{\Delta x}{\Delta t}$. If we consider the initial position $x_0$ at $t=0$ and final position $x$ at time $t$, then $v = \frac{x - x_0}{t - 0} \Rightarrow x - x_0 = vt \Rightarrow x = x_0 + vt$. #### 2. Uniformly Accelerated Motion - **Definition:** Motion with constant acceleration. - **Formulas:** - Velocity: $v = v_0 + at$ - Displacement: $x = x_0 + v_0t + \frac{1}{2}at^2$ - Velocity-Displacement Relation: $v^2 = v_0^2 + 2a(x - x_0)$ - **Derivations:** - **Velocity:** By definition, acceleration $a = \frac{\Delta v}{\Delta t}$. For constant acceleration, $a = \frac{v - v_0}{t - 0} \Rightarrow v - v_0 = at \Rightarrow v = v_0 + at$. - **Displacement:** For constant acceleration, the average velocity is $\bar{v} = \frac{v_0 + v}{2}$. Also, displacement $x - x_0 = \bar{v}t$. Substituting the expression for $v$: $x - x_0 = \left(\frac{v_0 + (v_0 + at)}{2}\right)t = \left(\frac{2v_0 + at}{2}\right)t = v_0t + \frac{1}{2}at^2$. Thus, $x = x_0 + v_0t + \frac{1}{2}at^2$. - **Velocity-Displacement:** From $v = v_0 + at$, we get $t = \frac{v - v_0}{a}$. Substitute this into the displacement equation: $x - x_0 = v_0\left(\frac{v - v_0}{a}\right) + \frac{1}{2}a\left(\frac{v - v_0}{a}\right)^2$ $x - x_0 = \frac{v_0v - v_0^2}{a} + \frac{a(v^2 - 2vv_0 + v_0^2)}{2a^2}$ $2a(x - x_0) = 2v_0v - 2v_0^2 + v^2 - 2vv_0 + v_0^2$ $2a(x - x_0) = v^2 - v_0^2$ $v^2 = v_0^2 + 2a(x - x_0)$. ### Newton's Laws of Motion These laws form the foundation of classical mechanics. #### 1. Newton's First Law (Law of Inertia) - **Statement:** An object at rest stays at rest and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. - **Explanation:** This law introduces the concept of inertia, the natural tendency of an object to resist changes in its state of motion. It also defines an inertial frame of reference as one where this law holds true. #### 2. Newton's Second Law - **Statement:** The acceleration of an object as produced by a net force is directly proportional to the magnitude of the net force, in the same direction as the net force, and inversely proportional to the mass of the object. - **Formula:** $\vec{F}_{net} = m\vec{a}$ - **Derivation:** Historically, Newton defined force as the rate of change of momentum ($\vec{p} = m\vec{v}$). $\vec{F}_{net} = \frac{d\vec{p}}{dt} = \frac{d(m\vec{v})}{dt}$ If mass $m$ is constant, $\vec{F}_{net} = m\frac{d\vec{v}}{dt} = m\vec{a}$. - **Mathematical Explanation:** It's a vector equation, meaning the direction of acceleration is the same as the direction of the net force. The unit of force, Newton (N), is defined as $1 \text{ N} = 1 \text{ kg} \cdot \text{m/s}^2$. #### 3. Newton's Third Law - **Statement:** For every action, there is an equal and opposite reaction. - **Explanation:** When one object exerts a force on a second object, the second object simultaneously exerts a force of equal magnitude and opposite direction on the first object. These forces act on different bodies and thus do not cancel each other out. - **Mathematical Expression:** If object A exerts a force $\vec{F}_{AB}$ on object B, then object B exerts a force $\vec{F}_{BA}$ on object A such that $\vec{F}_{AB} = -\vec{F}_{BA}$. ### Work, Energy, and Power These concepts are fundamental to understanding how forces affect motion and how energy transforms. #### 1. Work - **Definition:** Work done by a constant force is the product of the magnitude of the force, the magnitude of the displacement, and the cosine of the angle between them. - **Formula:** $W = \vec{F} \cdot \vec{d} = Fd\cos\theta$ - **Units:** Joule (J), where $1 \text{ J} = 1 \text{ N} \cdot \text{m}$. - **Mathematical Explanation:** Work is a scalar quantity. If force and displacement are in the same direction ($\theta = 0^\circ$), $\cos\theta = 1$, so $W = Fd$. If they are perpendicular ($\theta = 90^\circ$), $\cos\theta = 0$, so $W = 0$. If they are in opposite directions ($\theta = 180^\circ$), $\cos\theta = -1$, so $W = -Fd$. - **Work done by a variable force:** $W = \int \vec{F} \cdot d\vec{r}$ #### 2. Kinetic Energy - **Definition:** The energy an object possesses due to its motion. - **Formula:** $KE = \frac{1}{2}mv^2$ - **Units:** Joule (J). - **Derivation (Work-Energy Theorem):** From $F_{net} = ma$ and $v^2 = v_0^2 + 2a(x - x_0)$, we have $a = \frac{v^2 - v_0^2}{2(x - x_0)}$. Substituting $a$ into the work formula ($W = F_{net}(x-x_0)$ for constant force and displacement in the same direction): $W_{net} = m\left(\frac{v^2 - v_0^2}{2(x - x_0)}\right)(x - x_0) = \frac{1}{2}mv^2 - \frac{1}{2}mv_0^2$. This implies that the net work done on an object equals the change in its kinetic energy: $W_{net} = \Delta KE$. #### 3. Potential Energy - **Definition:** Stored energy that an object possesses due to its position or configuration. - **Types:** - **Gravitational Potential Energy (GPE):** Energy due to position in a gravitational field. - **Formula:** $U_g = mgh$ - **Derivation:** Work done against gravity to lift an object of mass $m$ to a height $h$ is $W = Fd = (mg)h = mgh$. This work is stored as GPE. - **Elastic Potential Energy (EPE):** Energy stored in a stretched or compressed elastic object (like a spring). - **Formula:** $U_s = \frac{1}{2}kx^2$ - **Derivation:** The force exerted by a spring is $F_s = -kx$ (Hooke's Law). The work done to stretch or compress a spring by $x$ is $W = \int_0^x F_s dx = \int_0^x kx' dx' = \frac{1}{2}kx^2$. This work is stored as EPE. #### 4. Power - **Definition:** The rate at which work is done or energy is transferred. - **Formulas:** - Average Power: $P_{avg} = \frac{W}{\Delta t}$ - Instantaneous Power: $P = \frac{dW}{dt} = \vec{F} \cdot \vec{v}$ - **Units:** Watt (W), where $1 \text{ W} = 1 \text{ J/s}$. - **Derivation of $P = \vec{F} \cdot \vec{v}$:** We know $W = \vec{F} \cdot \Delta\vec{r}$. So, $P = \frac{dW}{dt} = \frac{d(\vec{F} \cdot \vec{r})}{dt}$. If $\vec{F}$ is constant or the angle between $\vec{F}$ and $\vec{r}$ is constant, then $P = \vec{F} \cdot \frac{d\vec{r}}{dt} = \vec{F} \cdot \vec{v}$. ### Conservation Laws These are fundamental principles in physics stating that certain physical properties remain constant in an isolated system. #### 1. Conservation of Mechanical Energy - **Statement:** In an isolated system where only conservative forces (like gravity, elastic spring force) do work, the total mechanical energy (sum of kinetic and potential energy) remains constant. - **Formula:** $E_{total} = KE + U = \text{constant}$ $KE_i + U_i = KE_f + U_f$ $\frac{1}{2}mv_i^2 + mgh_i + \frac{1}{2}kx_i^2 = \frac{1}{2}mv_f^2 + mgh_f + \frac{1}{2}kx_f^2$ - **Derivation:** The Work-Energy Theorem states $W_{net} = \Delta KE$. If only conservative forces do work, then $W_{net} = -\Delta U$ (where $U$ is potential energy). So, $-\Delta U = \Delta KE \Rightarrow \Delta KE + \Delta U = 0$. $(KE_f - KE_i) + (U_f - U_i) = 0 \Rightarrow KE_f + U_f = KE_i + U_i$. #### 2. Conservation of Linear Momentum - **Statement:** In an isolated system (where the net external force is zero), the total linear momentum of the system remains constant. - **Formula:** $\vec{P}_{total} = \sum \vec{p} = \text{constant}$ $m_1\vec{v}_{1i} + m_2\vec{v}_{2i} = m_1\vec{v}_{1f} + m_2\vec{v}_{2f}$ (for a two-body system) - **Derivation:** From Newton's Second Law, $\vec{F}_{net} = \frac{d\vec{P}_{total}}{dt}$. If $\vec{F}_{net} = 0$, then $\frac{d\vec{P}_{total}}{dt} = 0$, which implies $\vec{P}_{total} = \text{constant}$. - **Types of Collisions:** - **Elastic Collision:** Both momentum and kinetic energy are conserved. - **Inelastic Collision:** Momentum is conserved, but kinetic energy is *not* conserved (some is lost as heat, sound, deformation). - **Perfectly Inelastic Collision:** Objects stick together after collision; momentum is conserved, kinetic energy is not. ### Rotational Motion Describes the motion of rigid bodies rotating about an axis. #### 1. Angular Kinematics - **Angular Displacement:** $\theta$ (radians) - **Angular Velocity:** $\omega = \frac{d\theta}{dt}$ (rad/s) - **Angular Acceleration:** $\alpha = \frac{d\omega}{dt}$ (rad/s$^2$) - **Formulas (for constant angular acceleration):** - $\omega = \omega_0 + \alpha t$ - $\theta = \theta_0 + \omega_0 t + \frac{1}{2}\alpha t^2$ - $\omega^2 = \omega_0^2 + 2\alpha(\theta - \theta_0)$ - **Analogy to Linear Kinematics:** - $x \leftrightarrow \theta$ - $v \leftrightarrow \omega$ - $a \leftrightarrow \alpha$ #### 2. Torque and Moment of Inertia - **Torque ($\vec{\tau}$):** The rotational equivalent of force, causing angular acceleration. - **Formula:** $\vec{\tau} = \vec{r} \times \vec{F}$ (vector cross product) or $\tau = rF\sin\theta$ (magnitude) - **Units:** N$\cdot$m - **Moment of Inertia ($I$):** The rotational equivalent of mass, representing resistance to angular acceleration. - **Formula (for point mass):** $I = mr^2$ - **Formula (for continuous body):** $I = \int r^2 dm$ - **Units:** kg$\cdot$m$^2$ - **Newton's Second Law for Rotation:** $\vec{\tau}_{net} = I\vec{\alpha}$ - **Derivation:** Consider a point mass $m$ at radius $r$ experiencing a tangential force $F_t$. $F_t = ma_t$. We know $a_t = r\alpha$. So, $F_t = m(r\alpha)$. Multiplying by $r$ to get torque: $\tau = rF_t = r(mr\alpha) = (mr^2)\alpha$. Thus, $\tau = I\alpha$ where $I = mr^2$. #### 3. Rotational Kinetic Energy - **Formula:** $KE_{rot} = \frac{1}{2}I\omega^2$ - **Derivation:** Consider an object as a collection of point masses $m_i$ at radii $r_i$ rotating with angular velocity $\omega$. The kinetic energy of each point mass is $KE_i = \frac{1}{2}m_iv_i^2$. Since $v_i = r_i\omega$, $KE_i = \frac{1}{2}m_i(r_i\omega)^2 = \frac{1}{2}m_ir_i^2\omega^2$. The total rotational kinetic energy is the sum of these: $KE_{rot} = \sum KE_i = \sum \frac{1}{2}m_ir_i^2\omega^2 = \frac{1}{2}\left(\sum m_ir_i^2\right)\omega^2$. Since $I = \sum m_ir_i^2$, we get $KE_{rot} = \frac{1}{2}I\omega^2$. #### 4. Angular Momentum - **Formula:** $\vec{L} = I\vec{\omega}$ (for rigid body) or $\vec{L} = \vec{r} \times \vec{p}$ (for point mass) - **Units:** kg$\cdot$m$^2$/s - **Conservation of Angular Momentum:** In an isolated system (where the net external torque is zero), the total angular momentum remains constant. - **Formula:** $L_{total} = \text{constant} \Rightarrow I_i\omega_i = I_f\omega_f$ - **Derivation:** From Newton's Second Law for rotation, $\vec{\tau}_{net} = \frac{d\vec{L}}{dt}$. If $\vec{\tau}_{net} = 0$, then $\frac{d\vec{L}}{dt} = 0$, which implies $\vec{L} = \text{constant}$. ### Simple Harmonic Motion (SHM) A type of periodic motion where the restoring force is directly proportional to the displacement and acts in the direction opposite to the displacement. #### 1. Defining Equation - **Restoring Force:** $F = -kx$ (Hooke's Law for a spring) - **Differential Equation:** $m\frac{d^2x}{dt^2} = -kx \Rightarrow \frac{d^2x}{dt^2} + \frac{k}{m}x = 0$ - **Solution:** $x(t) = A\cos(\omega t + \phi)$ or $x(t) = A\sin(\omega t + \phi)$ - $A$: Amplitude (maximum displacement) - $\omega$: Angular frequency ($\omega = \sqrt{\frac{k}{m}}$ for a spring-mass system) - $\phi$: Phase constant #### 2. Key Parameters - **Angular Frequency ($\omega$):** $\omega = \sqrt{\frac{k}{m}}$ (for spring-mass) or $\omega = \sqrt{\frac{g}{L}}$ (for simple pendulum for small angles) - **Frequency ($f$):** $f = \frac{\omega}{2\pi} = \frac{1}{2\pi}\sqrt{\frac{k}{m}}$ - **Period ($T$):** $T = \frac{1}{f} = 2\pi\sqrt{\frac{m}{k}}$ (for spring-mass) or $T = 2\pi\sqrt{\frac{L}{g}}$ (for simple pendulum) #### 3. Energy in SHM - **Kinetic Energy:** $KE = \frac{1}{2}mv^2 = \frac{1}{2}m(-\omega A\sin(\omega t + \phi))^2 = \frac{1}{2}m\omega^2 A^2\sin^2(\omega t + \phi)$ - **Potential Energy:** $PE = \frac{1}{2}kx^2 = \frac{1}{2}k(A\cos(\omega t + \phi))^2 = \frac{1}{2}kA^2\cos^2(\omega t + \phi)$ - **Total Mechanical Energy:** $E_{total} = KE + PE = \frac{1}{2}m\omega^2 A^2\sin^2(\omega t + \phi) + \frac{1}{2}kA^2\cos^2(\omega t + \phi)$ Since $\omega^2 = k/m \Rightarrow k = m\omega^2$: $E_{total} = \frac{1}{2}kA^2\sin^2(\omega t + \phi) + \frac{1}{2}kA^2\cos^2(\omega t + \phi) = \frac{1}{2}kA^2(\sin^2(\omega t + \phi) + \cos^2(\omega t + \phi)) = \frac{1}{2}kA^2$ Thus, the total mechanical energy in SHM is constant and proportional to the square of the amplitude. ### Waves Waves are disturbances that transfer energy without transferring matter. #### 1. Wave Characteristics - **Wavelength ($\lambda$):** The distance between two consecutive identical points on a wave. - **Frequency ($f$):** The number of complete cycles per unit time. - **Period ($T$):** The time taken for one complete cycle ($T = 1/f$). - **Amplitude ($A$):** The maximum displacement or distance moved by a point on a vibrating body or wave measured from its equilibrium position. - **Wave Speed ($v$):** The speed at which the wave propagates. - **Formula:** $v = f\lambda$ - **Derivation:** In one period $T$, the wave travels one wavelength $\lambda$. So, speed $v = \frac{\lambda}{T}$. Since $f = 1/T$, then $v = f\lambda$. #### 2. Types of Waves - **Transverse Waves:** Particles of the medium oscillate perpendicular to the direction of wave propagation (e.g., light waves, waves on a string). - **Longitudinal Waves:** Particles of the medium oscillate parallel to the direction of wave propagation (e.g., sound waves). #### 3. Wave Equation (1D) - **General Form:** $\frac{\partial^2 y}{\partial x^2} = \frac{1}{v^2}\frac{\partial^2 y}{\partial t^2}$ - **Solution for sinusoidal wave:** $y(x,t) = A\sin(kx - \omega t + \phi)$ - $k = \frac{2\pi}{\lambda}$ (wave number) - $\omega = 2\pi f$ (angular frequency) - $v = \frac{\omega}{k}$ #### 4. Sound Waves - **Nature:** Longitudinal waves. - **Speed of Sound in a Fluid:** $v = \sqrt{\frac{B}{\rho}}$ - $B$: Bulk modulus (resistance to compression) - $\rho$: Density of the medium - **Speed of Sound in a Solid Rod:** $v = \sqrt{\frac{Y}{\rho}}$ - $Y$: Young's modulus (resistance to stretching/compression) - **Intensity ($I$):** Power per unit area. - **Formula:** $I = \frac{P}{A}$ - **Units:** W/m$^2$ - **Intensity Level ($\beta$):** Measured in decibels (dB). - **Formula:** $\beta = 10 \log_{10}\left(\frac{I}{I_0}\right)$ - $I_0 = 10^{-12}$ W/m$^2$ (threshold of human hearing) #### 5. Doppler Effect - **Definition:** The apparent change in frequency or pitch of a sound detected by an observer because the sound source or the observer is moving. - **Formula:** $f' = f \left(\frac{v \pm v_O}{v \mp v_S}\right)$ - $f'$: Observed frequency - $f$: Source frequency - $v$: Speed of sound in the medium - $v_O$: Speed of observer - $v_S$: Speed of source - **Sign Convention:** - Numerator: Use '+' if observer moves **towards** source, '-' if observer moves **away**. - Denominator: Use '-' if source moves **towards** observer, '+' if source moves **away**. ### Thermodynamics The study of heat and its relation to other forms of energy and work. #### 1. Temperature and Heat - **Temperature:** A measure of the average kinetic energy of the particles in a substance. - **Heat ($Q$):** Energy transferred between objects due to a temperature difference. - **Specific Heat Capacity ($c$):** The amount of heat required to raise the temperature of 1 kg of a substance by 1 K (or $1^\circ$C). - **Formula:** $Q = mc\Delta T$ - **Units:** J/(kg$\cdot$K) or J/(kg$\cdot^\circ$C) - **Latent Heat ($L$):** The heat absorbed or released during a phase change (e.g., melting, boiling) without a change in temperature. - **Formula:** $Q = mL$ - **Units:** J/kg - $L_f$: Latent heat of fusion (solid to liquid) - $L_v$: Latent heat of vaporization (liquid to gas) #### 2. Laws of Thermodynamics - **Zeroth Law:** If two thermodynamic systems are each in thermal equilibrium with a third, then they are in thermal equilibrium with each other. (Establishes temperature as a fundamental property). - **First Law (Conservation of Energy):** The change in the internal energy of a closed thermodynamic system is equal to the amount of heat energy supplied to the system, minus the amount of work done by the system on its surroundings. - **Formula:** $\Delta U = Q - W$ - $\Delta U$: Change in internal energy - $Q$: Heat added to the system (positive) - $W$: Work done *by* the system (positive) - **Derivation:** This is essentially a statement of energy conservation. Energy can be transferred as heat or work, but cannot be created or destroyed within the system. - **Second Law:** The total entropy of an isolated system can only increase over time, or remain constant in ideal cases. It can never decrease. - **Statement (Clausius):** Heat cannot spontaneously flow from a colder body to a hotter body. - **Statement (Kelvin-Planck):** It is impossible to construct a device that operates in a cycle and produces no other effect than the absorption of heat from a reservoir and the conversion of this heat into an equivalent amount of work. (Implies no heat engine can be 100% efficient). - **Entropy ($S$):** A measure of the disorder or randomness of a system. - **Formula for reversible process:** $dS = \frac{dQ_{rev}}{T}$ - **Third Law:** As the temperature of a system approaches absolute zero, its entropy approaches a minimum constant value. (It is impossible to reach absolute zero in a finite number of steps). #### 3. Ideal Gas Law - **Formula:** $PV = nRT$ - $P$: Pressure - $V$: Volume - $n$: Number of moles - $R$: Ideal gas constant ($8.314 \text{ J/(mol}\cdot\text{K)}$) - $T$: Absolute temperature (Kelvin) - **Alternative Form:** $PV = Nk_BT$ - $N$: Number of molecules - $k_B$: Boltzmann constant ($1.38 \times 10^{-23} \text{ J/K}$) - **Derivation:** This law is an empirical relation combining Boyle's Law ($P \propto 1/V$), Charles's Law ($V \propto T$), and Avogadro's Law ($V \propto n$). ### Electricity and Magnetism The study of electric and magnetic phenomena and their interrelationship. #### 1. Electrostatics - **Coulomb's Law:** Describes the force between two point charges. - **Formula:** $F = k\frac{|q_1q_2|}{r^2}$ - $k = \frac{1}{4\pi\epsilon_0} \approx 9 \times 10^9 \text{ N}\cdot\text{m}^2/\text{C}^2$ (Coulomb's constant) - $\epsilon_0$: Permittivity of free space ($8.85 \times 10^{-12} \text{ C}^2/(\text{N}\cdot\text{m}^2)$) - **Electric Field ($\vec{E}$):** Force per unit charge. - **Formula:** $\vec{E} = \frac{\vec{F}}{q_0}$ - For a point charge $q$: $E = k\frac{|q|}{r^2}$ (direction radially outward for positive $q$, inward for negative $q$) - **Electric Potential ($V$):** Potential energy per unit charge. - **Formula:** $V = \frac{PE}{q_0}$ - For a point charge $q$: $V = k\frac{q}{r}$ - **Relation to Electric Field:** $\vec{E} = -\nabla V$ (in 3D), or $E_x = -\frac{dV}{dx}$ (in 1D) - **Capacitance ($C$):** Ability of a conductor to store charge. - **Formula:** $C = \frac{Q}{V}$ - For parallel plate capacitor: $C = \frac{\epsilon_0 A}{d}$ - **Energy stored in capacitor:** $U_C = \frac{1}{2}QV = \frac{1}{2}CV^2 = \frac{Q^2}{2C}$ #### 2. Electric Circuits (DC) - **Ohm's Law:** Relates voltage, current, and resistance. - **Formula:** $V = IR$ - $V$: Voltage (potential difference, Volts) - $I$: Current (Amperes) - $R$: Resistance (Ohms) - **Resistors in Series:** $R_{eq} = R_1 + R_2 + ...$ - **Resistors in Parallel:** $\frac{1}{R_{eq}} = \frac{1}{R_1} + \frac{1}{R_2} + ...$ - **Kirchhoff's Laws:** - **Junction Rule (Current Rule):** The sum of currents entering a junction equals the sum of currents leaving it (conservation of charge). $\sum I_{in} = \sum I_{out}$ - **Loop Rule (Voltage Rule):** The sum of potential differences around any closed loop in a circuit is zero (conservation of energy). $\sum \Delta V = 0$ - **Power Dissipated by Resistor:** $P = IV = I^2R = \frac{V^2}{R}$ #### 3. Magnetism - **Magnetic Force on a Moving Charge:** - **Formula:** $\vec{F}_B = q(\vec{v} \times \vec{B})$ - Magnitude: $F_B = qvB\sin\theta$ - Direction: Right-hand rule (for positive charge) - **Magnetic Force on a Current-Carrying Wire:** - **Formula:** $\vec{F}_B = I(\vec{L} \times \vec{B})$ - Magnitude: $F_B = ILB\sin\theta$ - **Magnetic Field from a Current (Biot-Savart Law):** - **Formula:** $d\vec{B} = \frac{\mu_0}{4\pi}\frac{I d\vec{l} \times \hat{r}}{r^2}$ - $\mu_0$: Permeability of free space ($4\pi \times 10^{-7} \text{ T}\cdot\text{m/A}$) - **Magnetic Field of a Long Straight Wire:** $B = \frac{\mu_0 I}{2\pi r}$ - **Magnetic Field of a Solenoid:** $B = \mu_0 n I$ ($n$ is turns per unit length) - **Ampere's Law:** $\oint \vec{B} \cdot d\vec{l} = \mu_0 I_{enc}$ (for steady currents) #### 4. Electromagnetic Induction - **Faraday's Law of Induction:** A changing magnetic flux through a coil induces an electromotive force (EMF). - **Formula:** $\mathcal{E} = -\frac{d\Phi_B}{dt}$ - $\Phi_B = \int \vec{B} \cdot d\vec{A}$ (magnetic flux) - The negative sign (Lenz's Law) indicates that the induced EMF opposes the change in magnetic flux that produced it. - **Motional EMF:** $\mathcal{E} = BLv$ (for a conductor of length $L$ moving with velocity $v$ perpendicular to uniform magnetic field $B$) - **Inductance ($L$):** Property of a circuit element to oppose changes in current. - **Formula:** $\mathcal{E} = -L\frac{dI}{dt}$ - **Energy stored in inductor:** $U_L = \frac{1}{2}LI^2$ ### Light and Optics The study of light and its interaction with matter. #### 1. Nature of Light - **Electromagnetic Wave:** Light is a transverse electromagnetic wave. - **Speed of Light in Vacuum ($c$):** $c = 3.00 \times 10^8 \text{ m/s}$ - **Wave Speed in a Medium:** $v = \frac{c}{n}$ - $n$: Refractive index of the medium ($n \ge 1$) - **Energy of a Photon:** $E = hf = \frac{hc}{\lambda}$ - $h$: Planck's constant ($6.626 \times 10^{-34} \text{ J}\cdot\text{s}$) - $f$: Frequency, $\lambda$: Wavelength #### 2. Reflection and Refraction - **Law of Reflection:** Angle of incidence equals angle of reflection ($\theta_i = \theta_r$). - **Snell's Law (Law of Refraction):** Relates the angles and refractive indices at an interface. - **Formula:** $n_1\sin\theta_1 = n_2\sin\theta_2$ - **Total Internal Reflection:** Occurs when light travels from a denser medium ($n_1$) to a less dense medium ($n_2$) at an angle of incidence greater than the critical angle ($\theta_c$). - **Critical Angle:** $\sin\theta_c = \frac{n_2}{n_1}$ (for $n_1 > n_2$) #### 3. Mirrors and Lenses (Thin Lens Equation) - **Mirror/Lens Equation:** $\frac{1}{f} = \frac{1}{d_o} + \frac{1}{d_i}$ - $f$: Focal length - $d_o$: Object distance - $d_i$: Image distance - **Magnification:** $M = -\frac{d_i}{d_o} = \frac{h_i}{h_o}$ - $h_i$: Image height, $h_o$: Object height - **Sign Conventions:** - **Focal Length ($f$):** Concave mirror / Converging lens: $f > 0$. Convex mirror / Diverging lens: $f 0$. Virtual object: $d_o 0$. Virtual image: $d_i 0$. Inverted image: $M ### Modern Physics Concepts developed in the 20th century, including relativity and quantum mechanics. #### 1. Special Relativity - **Postulates:** 1. The laws of physics are the same for all observers in all inertial frames of reference. 2. The speed of light in vacuum ($c$) has the same value in all inertial frames of reference, regardless of the motion of the source or observer. - **Consequences:** - **Time Dilation:** $\Delta t = \gamma \Delta t_0$ (moving clocks run slower) - **Length Contraction:** $L = L_0 / \gamma$ (moving objects are shorter in direction of motion) - **Relativistic Mass/Momentum:** $m = \gamma m_0$, $p = \gamma m_0 v$ - **Relativistic Energy:** $E = \gamma m_0 c^2 = KE + m_0 c^2$ - **Mass-Energy Equivalence:** $E = mc^2$ (where $m$ is relativistic mass) or $E_0 = m_0c^2$ (rest energy) - **Lorentz Factor:** $\gamma = \frac{1}{\sqrt{1 - v^2/c^2}}$ #### 2. Quantum Mechanics - **Photoelectric Effect:** Light striking a metal surface can eject electrons. - **Equation:** $KE_{max} = hf - \Phi$ - $KE_{max}$: Maximum kinetic energy of ejected electrons - $hf$: Energy of incident photon - $\Phi$: Work function of the metal (minimum energy to eject electron) - **Explanation:** Demonstrates particle nature of light (photons). - **De Broglie Wavelength:** All matter exhibits wave-like properties. - **Formula:** $\lambda = \frac{h}{p} = \frac{h}{mv}$ - **Explanation:** Relates the wave nature ($\lambda$) to the particle nature ($p=mv$) of matter. - **Heisenberg Uncertainty Principle:** It is impossible to simultaneously know precisely both the position and momentum of a particle. - **Formula:** $\Delta x \Delta p_x \ge \frac{\hbar}{2}$ (where $\hbar = h/2\pi$) - **Explanation:** A fundamental limit to the precision with which certain pairs of physical properties of a particle can be known. - **Schrödinger Equation (Time-Independent 1D):** - **Formula:** $-\frac{\hbar^2}{2m}\frac{d^2\psi(x)}{dx^2} + V(x)\psi(x) = E\psi(x)$ - $\psi(x)$: Wave function (probability amplitude) - $|\psi(x)|^2$: Probability density of finding the particle at $x$.