Classical Mechanics
Shared 5/10/2026•1 views
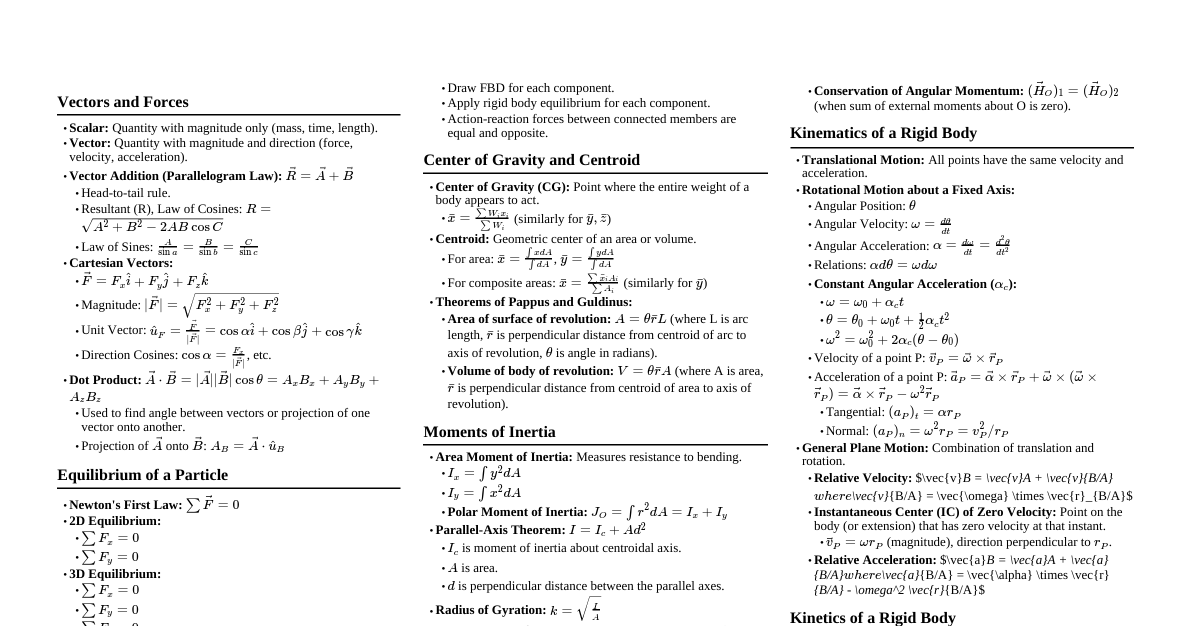
### Concepts: Basis Vectors - **Cartesian:** $\hat{i}, \hat{j}, \hat{k}$ (or $\hat{e}_x, \hat{e}_y, \hat{e}_z$) - mutually orthogonal, constant direction. - **Cylindrical:** $\hat{r}, \hat{\phi}, \hat{z}$ - $\hat{r}$ and $\hat{\phi}$ change direction. - $\vec{v} = \dot{r}\hat{r} + r\dot{\phi}\hat{\phi} + \dot{z}\hat{z}$ - $\vec{a} = (\ddot{r} - r\dot{\phi}^2)\hat{r} + (r\ddot{\phi} + 2\dot{r}\dot{\phi})\hat{\phi} + \ddot{z}\hat{z}$ - **Spherical:** $\hat{r}, \hat{\theta}, \hat{\phi}$ - all change direction. - $\vec{r} = r\hat{r}$ ### Concepts: Newton's Laws 1. **Inertia:** An object at rest stays at rest, and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. 2. **Force:** $\vec{F}_{net} = m\vec{a}$ (for constant mass systems). - Also $\vec{F}_{net} = \frac{d\vec{p}}{dt}$, where $\vec{p} = m\vec{v}$ is momentum. 3. **Action-Reaction:** For every action, there is an equal and opposite reaction. $\vec{F}_{AB} = -\vec{F}_{BA}$. ### Concepts: Phenomenological Forces / Constraints - **Gravity (near Earth):** $F_g = mg$ (downwards). - **Normal Force:** $N$ - perpendicular to surface, prevents penetration. - **Friction:** - **Static:** $f_s \le \mu_s N$ (opposes impending motion). - **Kinetic:** $f_k = \mu_k N$ (opposes motion, $\mu_k ### Concepts: Conservation of Momentum - **Principle:** If the net external force on a system is zero, the total momentum of the system remains constant. - **Equation:** $\sum \vec{p}_{initial} = \sum \vec{p}_{final}$ or $\frac{d\vec{P}_{total}}{dt} = \vec{F}_{external, net} = 0$. - **Collisions:** - **Elastic:** Momentum and kinetic energy conserved. - **Inelastic:** Momentum conserved, kinetic energy not conserved (some converted to heat/sound). - **Perfectly Inelastic:** Objects stick together, momentum conserved. ### Concepts: Conservation of Kinetic Energy - **Principle:** In an *elastic collision*, the total kinetic energy of the system is conserved. - **Equation:** $\sum KE_{initial} = \sum KE_{final}$ (only for elastic collisions). - **Kinetic Energy:** $KE = \frac{1}{2}mv^2$. - **Rotational Kinetic Energy:** $KE_{rot} = \frac{1}{2}I\omega^2$. ### Concepts: Potential Energy, Conservative / Non-Conservative Forces - **Potential Energy ($U$):** Energy associated with the configuration of a system. - **Conservative Force:** Work done by the force is path-independent and depends only on initial and final positions. - Examples: Gravity, Spring force. - $\vec{F} = -\nabla U$. - For 1D: $F_x = -\frac{dU}{dx}$. - **Non-Conservative Force:** Work done depends on the path taken. - Examples: Friction, Air resistance. - **Conservation of Mechanical Energy:** $E = KE + U$. - If only conservative forces do work: $E_{initial} = E_{final}$. - If non-conservative forces do work: $W_{nc} = \Delta E = \Delta KE + \Delta U$. - **Gravitational Potential Energy:** $U_g = mgh$ (near Earth's surface). - **Spring Potential Energy:** $U_s = \frac{1}{2}kx^2$. ### Concepts: Conservation of Angular Momentum - **Principle:** If the net external torque on a system is zero, the total angular momentum of the system remains constant. - **Angular Momentum:** - **Particle:** $\vec{L} = \vec{r} \times \vec{p} = \vec{r} \times (m\vec{v})$. - **Rigid Body:** $\vec{L} = I\vec{\omega}$ (for rotation about a principal axis). - **Equation:** $\sum \vec{L}_{initial} = \sum \vec{L}_{final}$ or $\frac{d\vec{L}_{total}}{dt} = \vec{\tau}_{external, net} = 0$. - **Torque:** $\vec{\tau} = \vec{r} \times \vec{F}$. ### Concepts: Resonance - **Definition:** Occurs when a driving frequency matches the natural (resonant) frequency ($\omega_0$) of a system, leading to a large amplitude of oscillation. - **Natural Frequency (undamped):** - Mass-spring: $\omega_0 = \sqrt{k/m}$. - Simple pendulum: $\omega_0 = \sqrt{g/L}$. - **Damped Harmonic Oscillator:** $m\ddot{x} + b\dot{x} + kx = 0$. - Damping ratio $\zeta = \frac{b}{2\sqrt{mk}}$. - Resonant frequency (for maximum amplitude): $\omega_d = \omega_0 \sqrt{1 - 2\zeta^2}$. - **Driven Harmonic Oscillator:** $m\ddot{x} + b\dot{x} + kx = F_0 \cos(\omega t)$. ### Derivation: Centrifugal Force - **Inertial Frame:** No centrifugal force. An object in circular motion experiences a centripetal force $\vec{F}_c = -m\frac{v^2}{r}\hat{r}$. - **Non-Inertial (Rotating) Frame:** A fictitious outward force that appears to act on objects. - **Derivation:** Consider an object in a frame rotating with angular velocity $\vec{\Omega}$. - Apparent acceleration $\vec{a}_{rot} = \vec{a}_{inertial} - 2\vec{\Omega} \times \vec{v}_{rot} - \vec{\Omega} \times (\vec{\Omega} \times \vec{r})$. - The term $-m\vec{\Omega} \times (\vec{\Omega} \times \vec{r})$ is the **centrifugal force**. - For circular motion in the xy-plane, $\vec{\Omega} = \Omega\hat{k}$, $\vec{r} = x\hat{i} + y\hat{j} = r\hat{r}$. - $\vec{F}_{centrifugal} = -m\vec{\Omega} \times (\vec{\Omega} \times \vec{r}) = -m\Omega\hat{k} \times (\Omega\hat{k} \times r\hat{r})$ - $\Omega\hat{k} \times r\hat{r} = \Omega r \hat{\phi}$ - $-m\Omega\hat{k} \times (\Omega r \hat{\phi}) = -m\Omega^2 r (\hat{k} \times \hat{\phi}) = -m\Omega^2 r (-\hat{r}) = m\Omega^2 r \hat{r}$. - **Magnitude:** $F_{centrifugal} = m\omega^2 r = mv^2/r$ (outward). ### Derivation: Angular Momentum of a Rigid Body - **General Definition:** $\vec{L} = \sum_i \vec{r}_i \times m_i \vec{v}_i$. - **For a rigid body rotating about a fixed axis (e.g., z-axis) with angular velocity $\vec{\omega} = \omega\hat{k}$:** - Each particle has velocity $\vec{v}_i = \vec{\omega} \times \vec{r}_i$. - $\vec{L} = \sum_i m_i \vec{r}_i \times (\vec{\omega} \times \vec{r}_i)$. - Using vector identity $\vec{A} \times (\vec{B} \times \vec{C}) = \vec{B}(\vec{A} \cdot \vec{C}) - \vec{C}(\vec{A} \cdot \vec{B})$: - $\vec{L} = \sum_i m_i [\vec{\omega}(\vec{r}_i \cdot \vec{r}_i) - \vec{r}_i(\vec{r}_i \cdot \vec{\omega})]$. - If $\vec{\omega}$ is along a principal axis (e.g., z-axis), then $\vec{r}_i \cdot \vec{\omega} = z_i \omega$. - $\vec{L} = \sum_i m_i [\vec{\omega} r_i^2 - \vec{r}_i z_i \omega]$. - For rotation about z-axis, $L_z = \sum_i m_i (\omega r_i^2 - z_i z_i \omega) = \sum_i m_i \omega (x_i^2+y_i^2) = (\sum_i m_i \rho_i^2) \omega = I_z \omega$. - **Result:** $\vec{L} = I\vec{\omega}$ where $I$ is the moment of inertia about the axis of rotation, assuming rotation about a principal axis. ### Derivation: Atwood's Machine with a Massive Pulley - **System:** Two masses $m_1, m_2$ connected by a string over a pulley with mass $M$ and radius $R$. Assume string doesn't slip. - **Forces:** - For $m_1$: $T_1 - m_1g = m_1a$ - For $m_2$: $m_2g - T_2 = m_2a$ (assuming $m_2 > m_1$, $m_2$ accelerates down) - **Torque on Pulley:** Net torque causes angular acceleration $\alpha$. - $\tau_{net} = T_2 R - T_1 R = I\alpha$. - For a solid disk pulley, $I = \frac{1}{2}MR^2$. - Since string doesn't slip, $a = R\alpha \implies \alpha = a/R$. - $T_2 R - T_1 R = (\frac{1}{2}MR^2)(\frac{a}{R}) \implies T_2 - T_1 = \frac{1}{2}Ma$. - **Solve for $a$:** 1. From $m_1$: $T_1 = m_1(g+a)$. 2. From $m_2$: $T_2 = m_2(g-a)$. 3. Substitute $T_1, T_2$ into pulley equation: $m_2(g-a) - m_1(g+a) = \frac{1}{2}Ma$ $g(m_2-m_1) - a(m_2+m_1) = \frac{1}{2}Ma$ $g(m_2-m_1) = a(m_2+m_1+\frac{1}{2}M)$ - **Acceleration:** $a = \frac{(m_2-m_1)g}{m_1+m_2+\frac{1}{2}M}$. ### Derivation: Rotational Friction of a Rolling Drum - **Scenario:** A drum (or cylinder) of mass $M$, radius $R$, moment of inertia $I$ rolls without slipping down an incline angle $\theta$. - **Forces:** - Gravity: $Mg\sin\theta$ (down the incline) - Friction: $f_s$ (up the incline, prevents slipping) - Normal force: $N = Mg\cos\theta$ - **Newton's 2nd Law (Translational):** - $Mg\sin\theta - f_s = Ma_{CM}$ - **Newton's 2nd Law (Rotational about CM):** - $\tau = f_s R = I\alpha$ - For rolling without slipping, $a_{CM} = R\alpha \implies \alpha = a_{CM}/R$. - $f_s R = I(a_{CM}/R) \implies f_s = \frac{I a_{CM}}{R^2}$. - **Substitute $f_s$ into translational equation:** - $Mg\sin\theta - \frac{I a_{CM}}{R^2} = Ma_{CM}$ - $Mg\sin\theta = a_{CM}(M + \frac{I}{R^2})$ - **Acceleration:** $a_{CM} = \frac{Mg\sin\theta}{M + I/R^2}$. - **For a solid cylinder:** $I = \frac{1}{2}MR^2$. - $a_{CM} = \frac{Mg\sin\theta}{M + (\frac{1}{2}MR^2)/R^2} = \frac{Mg\sin\theta}{M + \frac{1}{2}M} = \frac{Mg\sin\theta}{\frac{3}{2}M} = \frac{2}{3}g\sin\theta$. - **Friction force required:** $f_s = \frac{I a_{CM}}{R^2} = \frac{I}{R^2} \frac{Mg\sin\theta}{M + I/R^2} = \frac{Mg\sin\theta}{1 + MR^2/I}$. - For no slipping, $f_s \le \mu_s N = \mu_s Mg\cos\theta$. - $\frac{Mg\sin\theta}{1 + MR^2/I} \le \mu_s Mg\cos\theta \implies \mu_s \ge \frac{\tan\theta}{1 + MR^2/I}$. ### Derivation: Driven Harmonic Oscillator - **Equation of Motion:** $m\ddot{x} + b\dot{x} + kx = F_0 \cos(\omega t)$. - **General Solution:** $x(t) = x_h(t) + x_p(t)$. - $x_h(t)$ is the homogeneous (transient) solution, which decays over time due to damping. - $x_p(t)$ is the particular (steady-state) solution, which oscillates at the driving frequency $\omega$. - **Assume steady-state solution of the form:** $x_p(t) = A \cos(\omega t - \delta)$. - Alternatively, use complex exponentials: $F_0 e^{i\omega t}$ and assume $x_p(t) = A e^{i(\omega t - \delta)}$. - **Substitute into equation of motion:** - $x_p(t) = A \cos(\omega t - \delta)$ - $\dot{x}_p(t) = -A\omega \sin(\omega t - \delta)$ - $\ddot{x}_p(t) = -A\omega^2 \cos(\omega t - \delta)$ - $m(-A\omega^2 \cos(\omega t - \delta)) + b(-A\omega \sin(\omega t - \delta)) + k(A \cos(\omega t - \delta)) = F_0 \cos(\omega t)$. - **Rearrange and equate coefficients (or use phasor/complex method):** - $(k-m\omega^2)A\cos(\omega t - \delta) - b\omega A\sin(\omega t - \delta) = F_0 \cos(\omega t)$. - Use $\cos(\omega t - \delta) = \cos\omega t \cos\delta + \sin\omega t \sin\delta$ and $\sin(\omega t - \delta) = \sin\omega t \cos\delta - \cos\omega t \sin\delta$. - Collect terms for $\cos\omega t$ and $\sin\omega t$. - Equate coefficients with $F_0 \cos\omega t$. - **Resulting Amplitude ($A$) and Phase Shift ($\delta$):** - $A = \frac{F_0}{\sqrt{(k-m\omega^2)^2 + (b\omega)^2}}$ - $\tan\delta = \frac{b\omega}{k-m\omega^2}$ - **In terms of natural frequency $\omega_0 = \sqrt{k/m}$ and damping ratio $\zeta = b/(2\sqrt{mk})$:** - $A = \frac{F_0/k}{\sqrt{(1-(\omega/\omega_0)^2)^2 + (2\zeta\omega/\omega_0)^2}}$ - $\tan\delta = \frac{2\zeta\omega/\omega_0}{1-(\omega/\omega_0)^2}$