Hibbeler Mechanics Cheatsheet
Cheatsheet Content
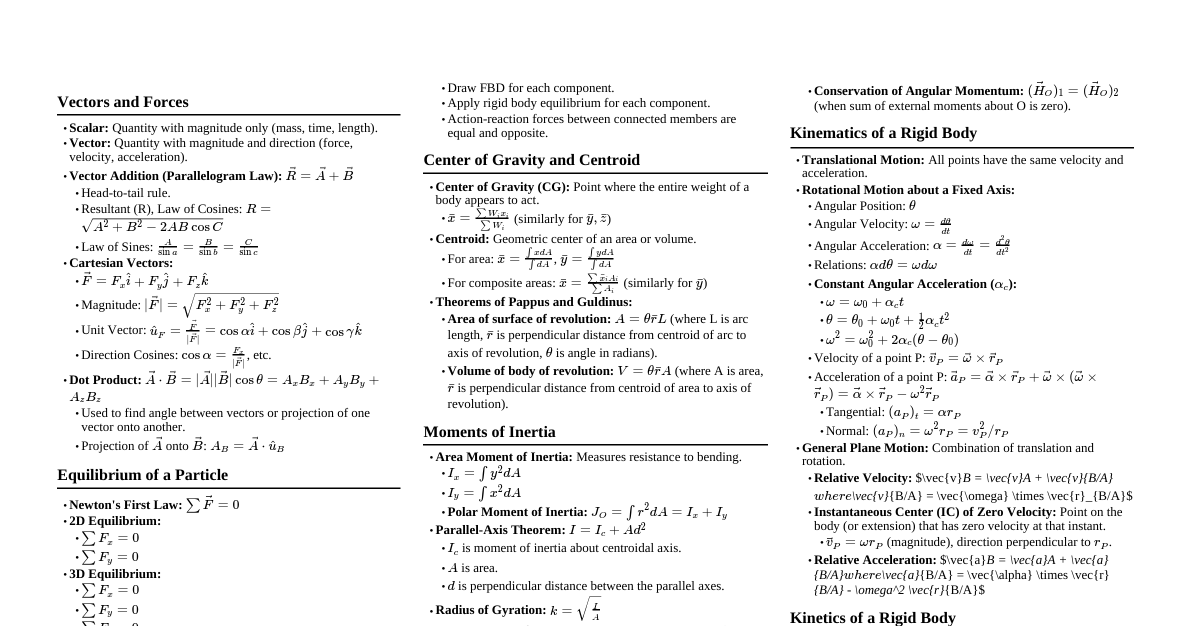
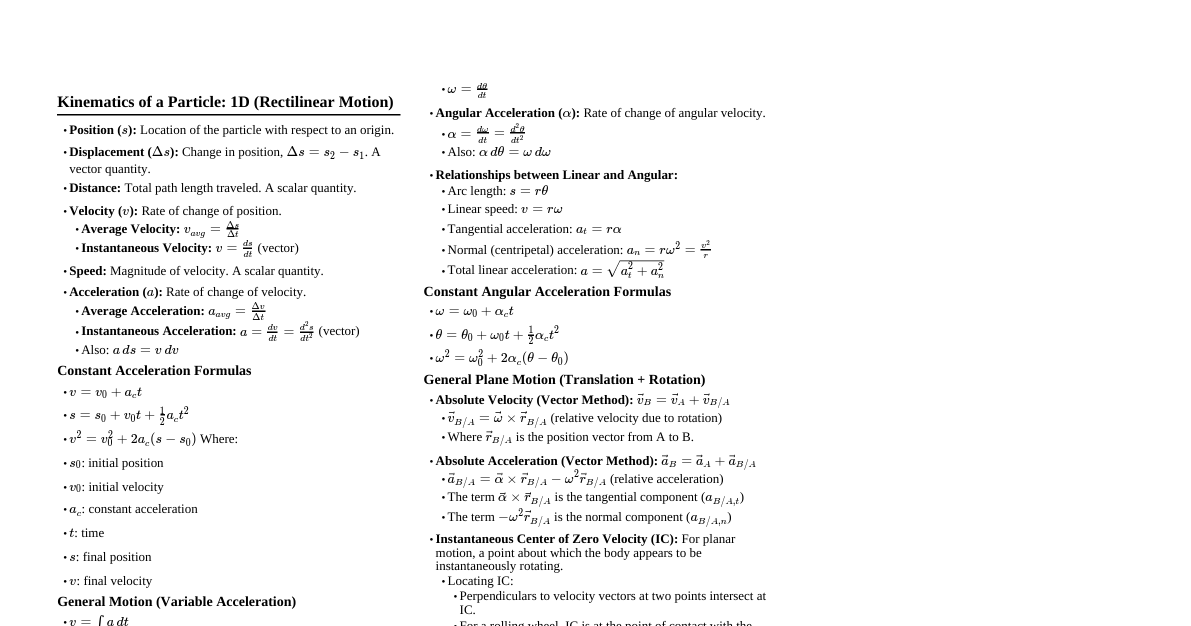
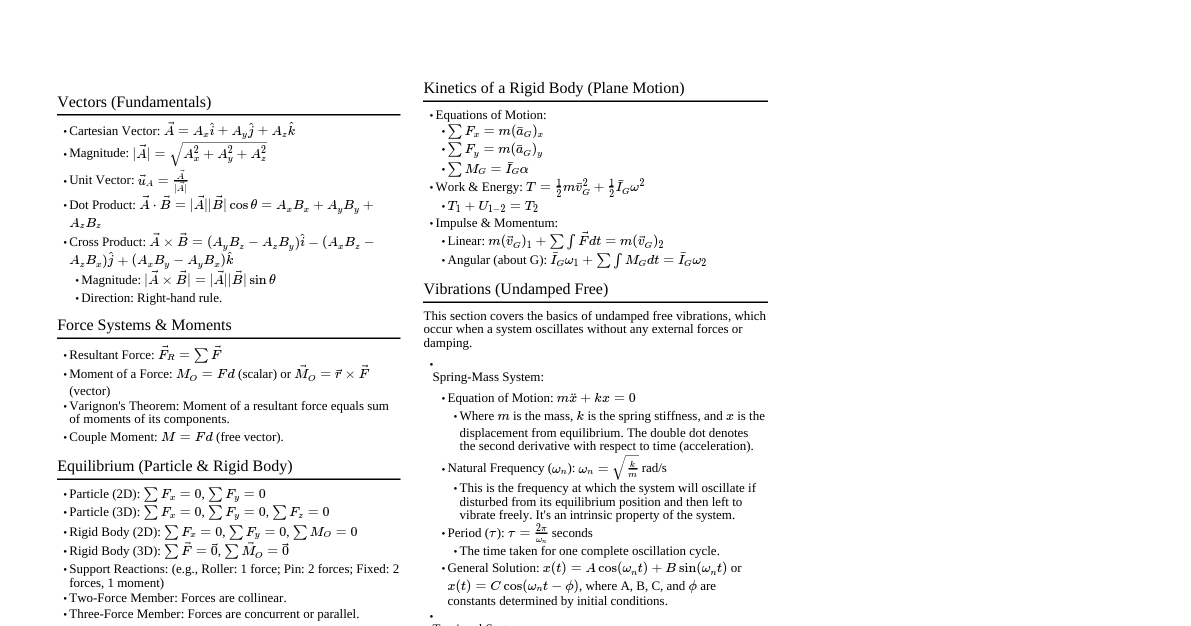
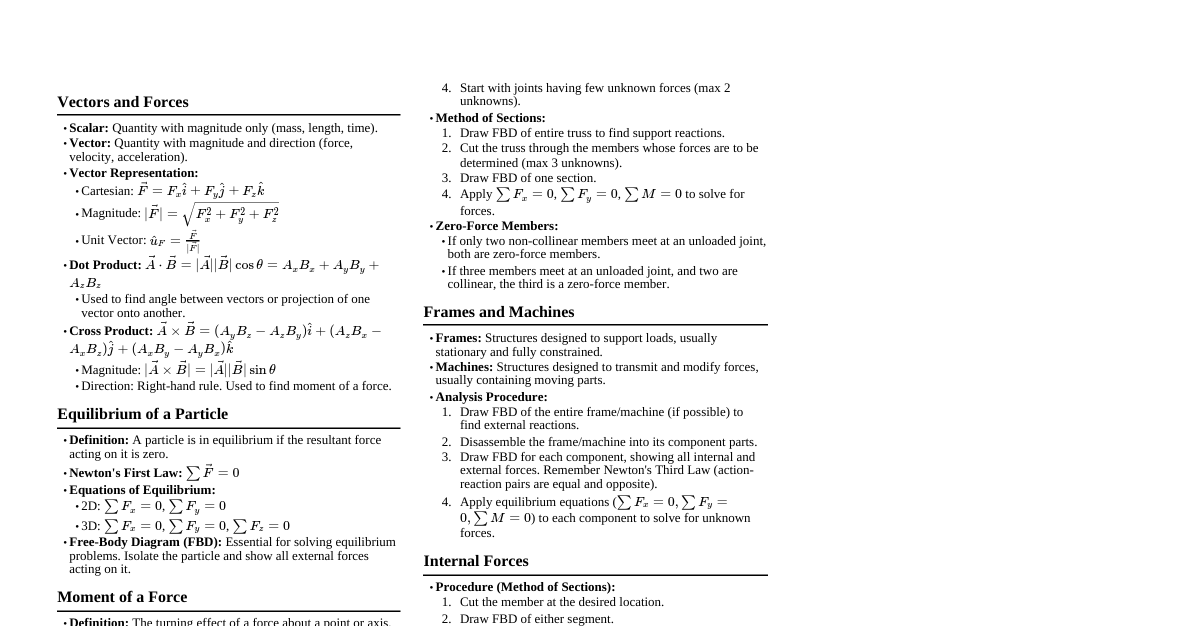
### Vectors and Forces - **Scalar:** Quantity with magnitude only (mass, time, length). - **Vector:** Quantity with magnitude and direction (force, velocity, acceleration). Represented as $\vec{F}$ or $\mathbf{F}$. - **Vector Addition (Parallelogram Law):** - Place tails of vectors at a common point. - Form a parallelogram with vectors as adjacent sides. - Resultant is the diagonal from the common point. - **Vector Addition (Triangle Rule):** - Place tail of second vector at head of first. - Resultant connects tail of first to head of second. - **Components:** A vector $\vec{F}$ can be resolved into components $F_x$ and $F_y$ along axes. - $F_x = F \cos\theta$ - $F_y = F \sin\theta$ (where $\theta$ is angle with x-axis) - **Unit Vector:** $\vec{u}_A = \frac{\vec{A}}{|\vec{A}|}$. Used to define direction. - **Position Vector:** $\vec{r} = (x_2 - x_1)\mathbf{i} + (y_2 - y_1)\mathbf{j} + (z_2 - z_1)\mathbf{k}$. - **Force Vector along a Line:** $\vec{F} = F \left(\frac{\vec{r}}{|\vec{r}|}\right) = F \vec{u}$. - **Dot Product:** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z$. - Used to find angle between vectors or projection of one vector onto another. - Projection of $\vec{A}$ onto $\vec{B}$: $A_B = \vec{A} \cdot \vec{u}_B$. - **Cross Product:** $\vec{C} = \vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\mathbf{i} - (A_x B_z - A_z B_x)\mathbf{j} + (A_x B_y - A_y B_x)\mathbf{k}$. - Magnitude: $|\vec{A} \times \vec{B}| = |\vec{A}||\vec{B}|\sin\theta$. - Direction: Right-hand rule. - Used to calculate moment of a force. ### Equilibrium of a Particle - **Free-Body Diagram (FBD):** Essential for solving equilibrium problems. - Isolate the particle. - Show all external forces acting on it (known and unknown). - Include weight, tension, normal forces, friction. - **Newton's First Law:** A particle remains at rest or continues to move with constant velocity if the resultant force acting on it is zero. - **Equations of Equilibrium:** - 2D: $\sum F_x = 0$, $\sum F_y = 0$ - 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - **Spring Force:** $F_s = k s$, where $k$ is spring stiffness and $s$ is deformation. ### Force System Resultants - **Moment of a Force (Scalar):** $M_O = Fd$, where $d$ is perpendicular distance from O to the line of action of F. - Direction: Clockwise (CW) or Counter-Clockwise (CCW). CCW is usually positive. - **Moment of a Force (Vector):** $\vec{M}_O = \vec{r} \times \vec{F}$. - $\vec{r}$ is position vector from point O to any point on the line of action of $\vec{F}$. - **Varignon's Theorem:** The moment of a force about a point is equal to the sum of the moments of its components about the same point. - $\vec{M}_O = \vec{r} \times (\vec{F}_1 + \vec{F}_2) = (\vec{r} \times \vec{F}_1) + (\vec{r} \times \vec{F}_2)$. - **Moment about an Axis:** $M_{axis} = \vec{u}_{axis} \cdot (\vec{r} \times \vec{F})$. - $\vec{u}_{axis}$ is unit vector along the axis. - **Couple Moment:** Two parallel forces of equal magnitude and opposite direction, separated by a perpendicular distance $d$. - $M_c = Fd$. - Is a free vector (can be moved anywhere without changing its effect). - **Resultant of a Force System:** - **Resultant Force:** $\vec{F}_R = \sum \vec{F}$. - **Resultant Moment:** $\vec{M}_{RO} = \sum (\vec{r} \times \vec{F}) + \sum \vec{M}_c$. - **Wrench:** A force-couple system consisting of a resultant force and a parallel resultant couple moment. ### Equilibrium of a Rigid Body - **Free-Body Diagram (FBD):** - Isolate the entire body. - Show all external forces and couple moments. - Support reactions: - **Roller:** Force perpendicular to surface. - **Pin/Hinge:** Two force components (x and y). - **Fixed Support:** Two force components and a couple moment. - **Cable/Rope:** Tension force along the cable. - **Smooth Surface:** Normal force perpendicular to surface. - **Rough Surface:** Normal force and friction force. - **Equations of Equilibrium:** - 2D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum M_O = 0$. (Sum moments about any point O) - 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$, $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$. - **Two-Force Member:** A member subjected to forces only at two points. Forces must be equal, opposite, and collinear. - **Three-Force Member:** A member subjected to forces only at three points. Forces must be concurrent or parallel. ### Trusses and Frames - **Truss:** A structure composed of slender members joined together at their endpoints. - Members are assumed to be two-force members (only axial forces). - Joints are assumed to be pins. - **Method of Joints:** - Draw FBD of each joint. - Apply particle equilibrium equations ($\sum F_x = 0, \sum F_y = 0$) to each joint. - Assume unknown forces are in tension (pulling away from joint). If negative, it's compression. - **Method of Sections:** - Cut the truss into two sections through members where forces are desired. - Draw FBD of one section. - Apply rigid body equilibrium equations ($\sum F_x = 0, \sum F_y = 0, \sum M = 0$). - **Frame:** A structure with at least one multi-force member. - Members are generally not two-force members. - Joints are often pins or fixed connections. - **Analysis:** - Draw FBD of the entire frame. - Disassemble the frame and draw FBD for each member. - Apply rigid body equilibrium equations to each member. - Action-reaction forces between connected members must be shown as equal and opposite. ### Friction - **Static Friction ($F_s$):** Opposes impending motion. $F_s \le \mu_s N$. - $\mu_s$: Coefficient of static friction. - $N$: Normal force. - At impending motion, $F_s = (\mu_s)_{max} N$. - **Kinetic Friction ($F_k$):** Opposes actual motion. $F_k = \mu_k N$. - $\mu_k$: Coefficient of kinetic friction ($\mu_k ### Center of Gravity and Centroid - **Center of Gravity (CG):** Point where the entire weight of a body acts. - $\bar{x} = \frac{\sum W_i x_i}{\sum W_i}$, $\bar{y} = \frac{\sum W_i y_i}{\sum W_i}$, $\bar{z} = \frac{\sum W_i z_i}{\sum W_i}$. - **Centroid:** Geometric center of an area or volume. - **Area:** $\bar{x} = \frac{\sum A_i \bar{x}_i}{\sum A_i}$, $\bar{y} = \frac{\sum A_i \bar{y}_i}{\sum A_i}$. - **Composite Areas:** Divide into simple shapes, find centroid of each, then use formulas above. - **Pappus-Guldinus Theorems:** - **First Theorem (Surface Area):** $A = \theta \bar{r} L$, where $L$ is length of generating curve, $\bar{r}$ is distance from centroid of curve to axis of revolution, $\theta$ is angle of revolution (in radians). - **Second Theorem (Volume):** $V = \theta \bar{r} A$, where $A$ is area of generating plane, $\bar{r}$ is distance from centroid of area to axis of revolution, $\theta$ is angle of revolution (in radians). ### Moments of Inertia - **Area Moment of Inertia:** Measures resistance to bending. - $I_x = \int y^2 dA$, $I_y = \int x^2 dA$. - **Polar Moment of Inertia:** $J_O = I_x + I_y = \int r^2 dA$. Measures resistance to torsion. - **Parallel-Axis Theorem:** $I_{x'} = I_x + Ad_y^2$, $I_{y'} = I_y + Ad_x^2$. - $I_x, I_y$: Moment of inertia about centroidal axes. - $I_{x'}, I_{y'}$: Moment of inertia about parallel axes. - $A$: Area. - $d_x, d_y$: Perpendicular distance between centroidal axis and parallel axis. - **Radius of Gyration:** $k = \sqrt{\frac{I}{A}}$. - **Composite Areas:** Calculate $I$ for each simple shape about its own centroid, then use parallel-axis theorem to shift to common reference axis, then sum. ### Virtual Work - **Principle of Virtual Work:** If a body is in equilibrium, the total virtual work done by all external forces acting on the body is zero for any virtual displacement consistent with the constraints. - $\delta U = \sum F_i \delta s_i + \sum M_i \delta\theta_i = 0$. - **Virtual Displacement ($\delta s$):** An infinitesimal, imaginary displacement. - **Virtual Work ($\delta U$):** Work done by a force during a virtual displacement. - **Conservative Forces:** Forces for which virtual work depends only on the initial and final positions (e.g., gravity, spring force). - **Potential Energy:** - Gravitational Potential Energy: $V_g = Wy$. - Elastic Potential Energy: $V_e = \frac{1}{2}ks^2$. - **Principle of Potential Energy:** If a conservative system is in equilibrium, the variation of its total potential energy is zero. - $\delta V = \delta (V_g + V_e) = 0$. - **Stability of Equilibrium:** - **Stable:** Minimum potential energy ($\frac{d^2V}{ds^2} > 0$). - **Unstable:** Maximum potential energy ($\frac{d^2V}{ds^2}