Hibbeler Mechanics Cheatsheet
Shared 3/23/2026•181 views
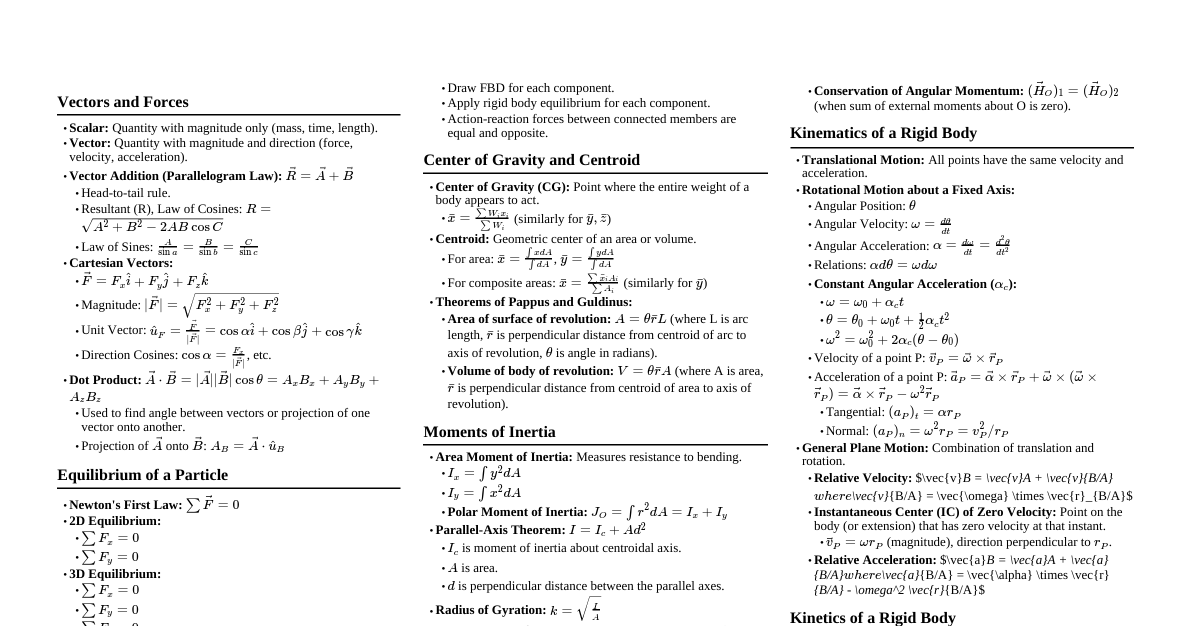
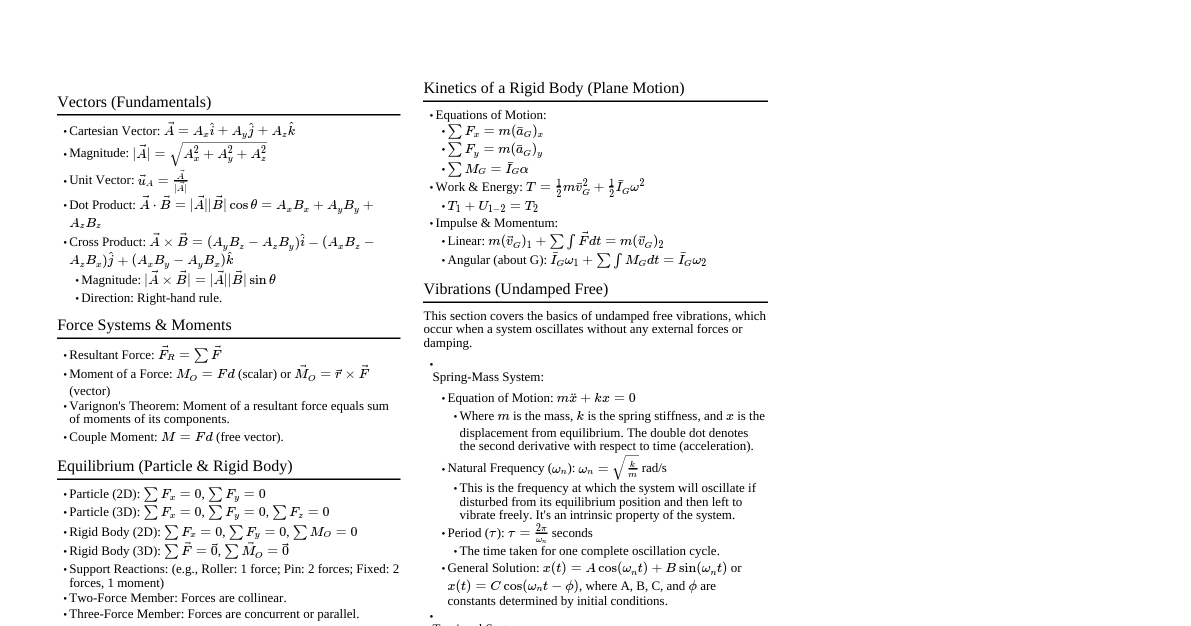
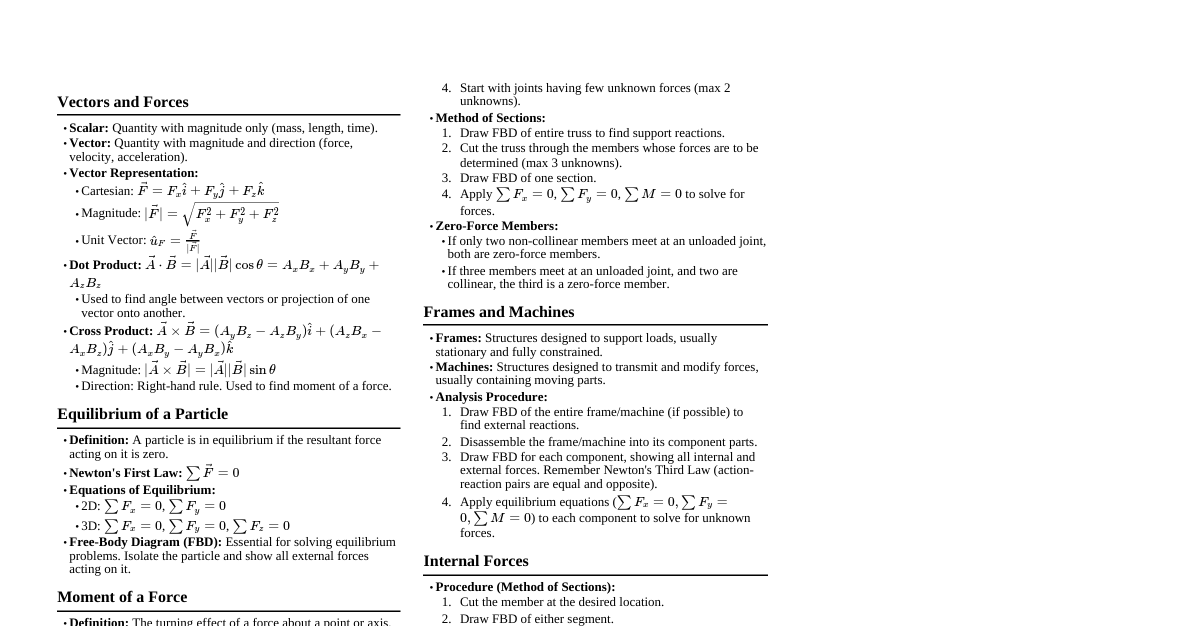
### Vectors and Force Systems #### Scalar & Vector Quantities - **Scalar:** Magnitude only (mass, length, time) - **Vector:** Magnitude and direction (force, velocity, acceleration) - Represented graphically by arrows. #### Vector Operations - **Addition (Parallelogram Law):** $\vec{R} = \vec{A} + \vec{B}$ - **Subtraction:** $\vec{A} - \vec{B} = \vec{A} + (-\vec{B})$ - **Components:** $\vec{F} = F_x \hat{i} + F_y \hat{j} + F_z \hat{k}$ - $F_x = F \cos\theta_x$, $F_y = F \cos\theta_y$, $F_z = F \cos\theta_z$ - $\cos^2\theta_x + \cos^2\theta_y + \cos^2\theta_z = 1$ - **Dot Product:** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z$ - Used to find angle between vectors or projection of one vector onto another. - **Cross Product:** $\vec{C} = \vec{A} \times \vec{B}$ - Magnitude: $|\vec{C}| = |\vec{A}||\vec{B}|\sin\theta$ - Direction: Right-hand rule, $\vec{C} \perp \vec{A}$ and $\vec{C} \perp \vec{B}$ - Determinant form: $$\begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ A_x & A_y & A_z \\ B_x & B_y & B_z \end{vmatrix}$$ - Used to calculate moment of a force. #### Force System Resultants - **Concurrent Forces:** All forces pass through a single point. - $\vec{F}_R = \sum \vec{F}$ - $F_{Rx} = \sum F_x$, $F_{Ry} = \sum F_y$, $F_{Rz} = \sum F_z$ - **Moment of a Force (Torque):** Tendency to rotate. - **Scalar:** $M_O = Fd$ (d = perpendicular distance from O to line of action of F) - **Vector:** $\vec{M}_O = \vec{r} \times \vec{F}$ (r = position vector from O to any point on line of action of F) - **Couple Moment:** Two equal, opposite, and non-collinear forces. - $\vec{M} = \vec{r} \times \vec{F}$ (r = vector from line of action of -F to line of action of F) - Magnitude: $M = Fd$ (d = perpendicular distance between forces) - **Varignon's Theorem:** Moment of resultant force equals sum of moments of its components. - $\vec{M}_O = \vec{r} \times (\vec{F}_1 + \vec{F}_2) = (\vec{r} \times \vec{F}_1) + (\vec{r} \times \vec{F}_2)$ - **Resultant of a General Force System:** - $\vec{F}_R = \sum \vec{F}$ - $\vec{M}_{Ro} = \sum (\vec{r} \times \vec{F}) + \sum \vec{M}_C$ (sum of moments and couple moments) - **Wrench:** A force system can be reduced to a resultant force $\vec{F}_R$ and a resultant couple moment $\vec{M}_R$ parallel to $\vec{F}_R$. ### Equilibrium of a Particle & Rigid Body #### Free-Body Diagrams (FBD) - Isolate the body. - Show all external forces and couple moments acting on the body. - Label knowns and unknowns. #### Equilibrium of a Particle - **Condition:** $\sum \vec{F} = 0$ - **2D:** $\sum F_x = 0$, $\sum F_y = 0$ - **3D:** $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - Max 2 (2D) or 3 (3D) unknowns can be solved. #### Equilibrium of a Rigid Body - **Conditions:** - $\sum \vec{F} = 0$ (translational equilibrium) - $\sum \vec{M}_O = 0$ (rotational equilibrium about any point O) - **2D (Planar):** - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum M_O = 0$ (moment about any point O in the plane) - Max 3 unknowns. - **3D (Space):** - $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ (moments about x, y, z axes) - Max 6 unknowns. #### Common Support Reactions | Type of Support | 2D Reaction | 3D Reaction | |---|---|---| | Cable | Force along cable | Force along cable | | Roller | Normal force $\perp$ surface | Normal force $\perp$ surface | | Smooth pin/hinge | Two force components | Three force components | | Fixed support | Two force components, one moment | Three force components, three moments | | Ball-and-socket | Three force components | Three force components | ### Structural Analysis #### Trusses - Members are slender and connected by frictionless pins. - Forces act only at joints. - All members are two-force members (tension or compression). - **Assumptions:** 1. All loads are applied at the joints. 2. Members are connected by smooth pins. - **Method of Joints:** - Apply particle equilibrium ($\sum F_x = 0, \sum F_y = 0$) to each joint. - Start with joints having 2 or fewer unknown member forces. - **Method of Sections:** - Cut through the truss, isolating a section. - Apply rigid body equilibrium ($\sum F_x = 0, \sum F_y = 0, \sum M_O = 0$) to the section. - Choose section and moment center to solve for desired forces efficiently (max 3 unknowns per section). - **Zero-Force Members:** - If only two non-collinear members connect at a joint and no external load/reaction is applied, both are zero-force members. - If three members connect, two are collinear, and no external load/reaction, the third is a zero-force member. #### Frames and Machines - Structures with at least one multi-force member. - Used to support loads (frames) or transmit/alter forces (machines). - **Procedure:** 1. Draw FBD of the entire structure. 2. Disassemble the structure and draw FBD of each component. 3. Apply rigid body equilibrium equations to each part and/or the whole. - Action-reaction forces between connected parts are equal and opposite. ### Center of Gravity, Centroid & Moment of Inertia #### Center of Gravity (CG) - Point where entire weight of body acts. - $x_C = \frac{\int \tilde{x} dW}{\int dW}$, $y_C = \frac{\int \tilde{y} dW}{\int dW}$, $z_C = \frac{\int \tilde{z} dW}{\int dW}$ #### Centroid - Geometric center of an area, volume, or line. - If material is homogeneous, CG coincides with centroid. - **Area:** - $x_C = \frac{\int \tilde{x} dA}{\int dA}$, $y_C = \frac{\int \tilde{y} dA}{\int dA}$ - For composite areas: $x_C = \frac{\sum \tilde{x}_i A_i}{\sum A_i}$, $y_C = \frac{\sum \tilde{y}_i A_i}{\sum A_i}$ - **Volume:** - $x_C = \frac{\int \tilde{x} dV}{\int dV}$, $y_C = \frac{\int \tilde{y} dV}{\int dV}$, $z_C = \frac{\int \tilde{z} dV}{\int dV}$ - For composite volumes: $x_C = \frac{\sum \tilde{x}_i V_i}{\sum V_i}$, etc. - **Line:** - $x_C = \frac{\int \tilde{x} dL}{\int dL}$, $y_C = \frac{\int \tilde{y} dL}{\int dL}$ - For composite lines: $x_C = \frac{\sum \tilde{x}_i L_i}{\sum L_i}$, etc. #### Moment of Inertia (Second Moment of Area) - Measure of an object's resistance to rotation. - **Area Moment of Inertia:** - $I_x = \int y^2 dA$ - $I_y = \int x^2 dA$ - $J_O = I_x + I_y = \int r^2 dA$ (Polar Moment of Inertia) - **Parallel-Axis Theorem:** $I = I_C + Ad^2$ - $I_C$: Moment of inertia about centroidal axis. - $A$: Area. - $d$: Perpendicular distance between the two parallel axes. - **Radius of Gyration:** $k = \sqrt{I/A}$ ### Friction #### Dry Friction - Force that opposes the relative motion or tendency of motion between two surfaces in contact. - **Static Friction ($F_s$):** - $F_s \le \mu_s N$ - $\mu_s$: Coefficient of static friction. - $N$: Normal force. - $F_s$ adjusts to prevent motion, up to its maximum value $\mu_s N$. - **Kinetic Friction ($F_k$):** - $F_k = \mu_k N$ - $\mu_k$: Coefficient of kinetic friction ($\mu_k ### Virtual Work - **Principle of Virtual Work:** - If a body is in equilibrium, the total virtual work done by all external forces and couple moments acting on the body is zero for any virtual displacement consistent with the body's constraints. - $\delta U = \sum F_i \delta s_i + \sum M_j \delta \theta_j = 0$ - $\delta s_i$: Virtual displacement in direction of $F_i$. - $\delta \theta_j$: Virtual rotation in direction of $M_j$. - **Conservative Forces:** Work done is independent of path (e.g., gravity, spring forces). - $dU = -dV$ - $V_g = Wy$ (gravitational potential energy) - $V_e = \frac{1}{2}ks^2$ (elastic potential energy of a spring) - **Principle of Potential Energy:** - If a system of rigid bodies is in equilibrium, its total potential energy (V) is at a stationary value. - $\delta V = 0$ - Stable equilibrium: V is a minimum. - Unstable equilibrium: V is a maximum. - Neutral equilibrium: V is constant. - **Applications:** - Solving for unknown forces or moments without dismembering a structure. - Determining stability of equilibrium positions.