Mecánica de Hibbeler
Cheatsheet Content
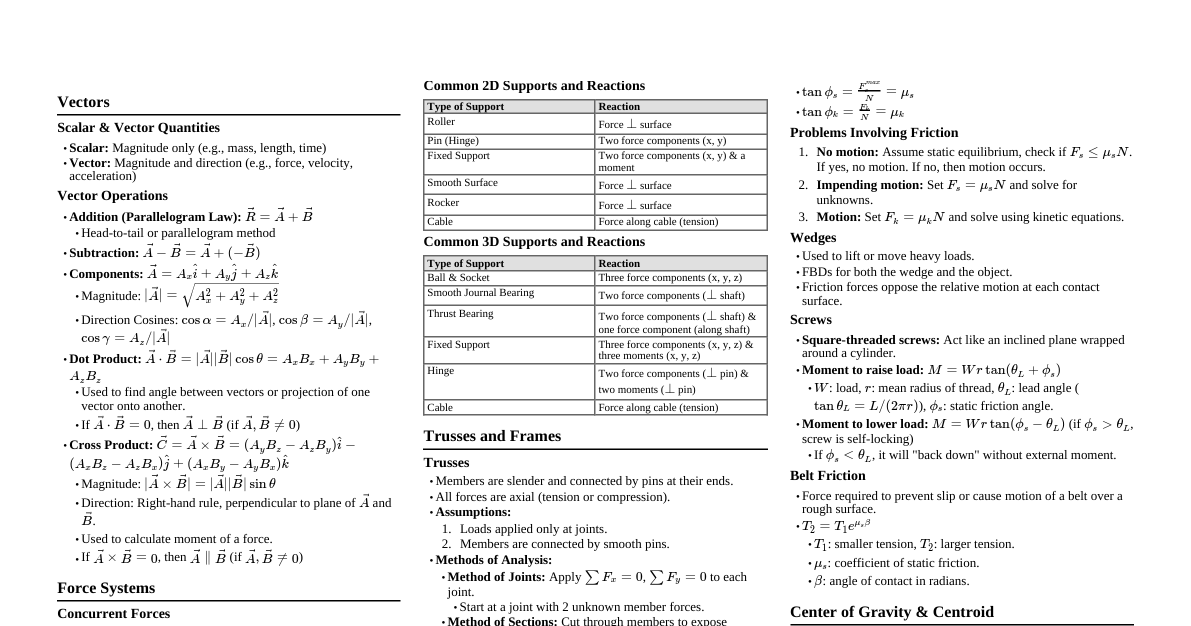
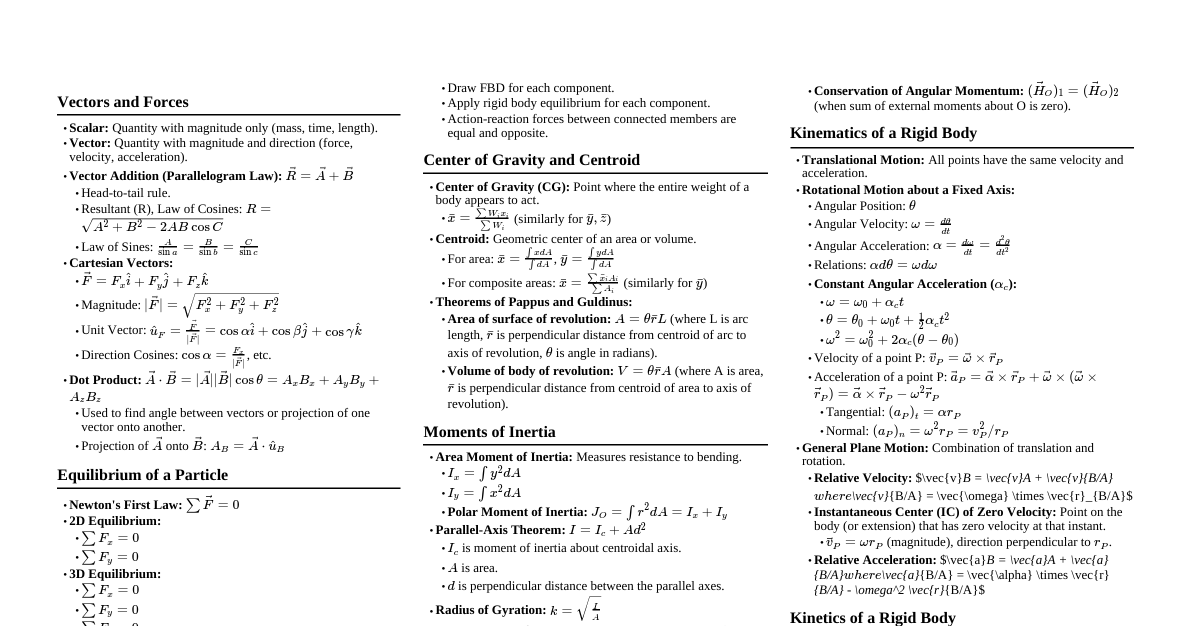
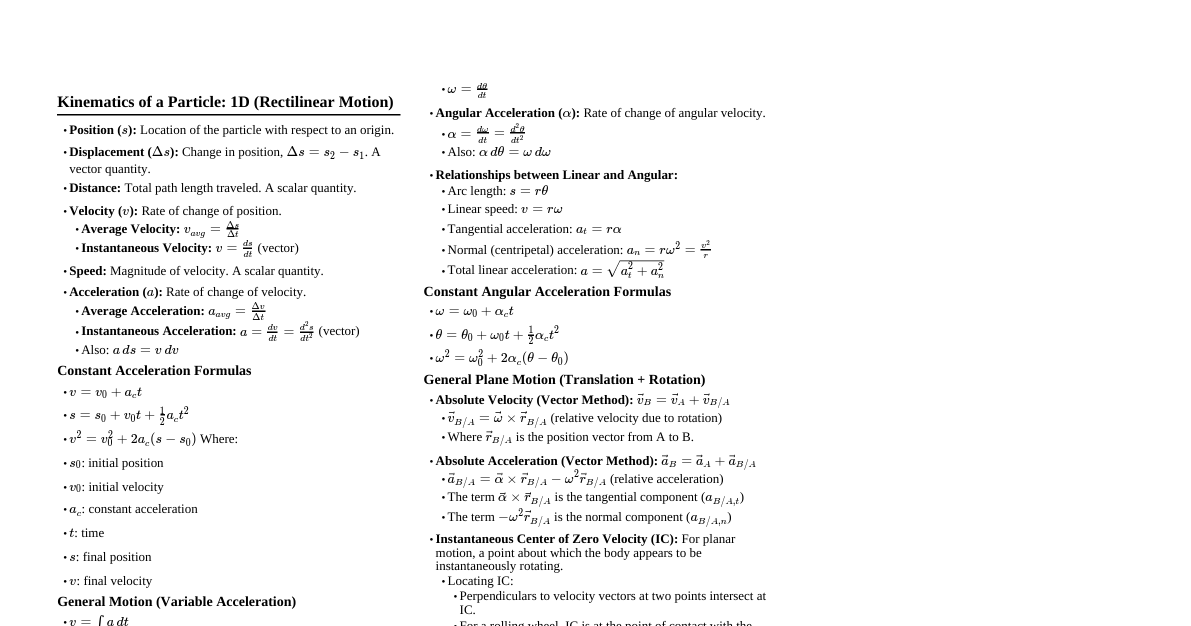
Vectores y Fuerzas Vector de posición: $\vec{r} = (x_B - x_A)\hat{i} + (y_B - y_A)\hat{j} + (z_B - z_A)\hat{k}$ Vector unitario: $\hat{u} = \frac{\vec{r}}{|\vec{r}|}$ Magnitud de un vector: $|\vec{F}| = \sqrt{F_x^2 + F_y^2 + F_z^2}$ Producto punto: $\vec{A} \cdot \vec{B} = AB \cos\theta = A_x B_x + A_y B_y + A_z B_z$ Ángulo entre vectores: $\cos\theta = \frac{\vec{A} \cdot \vec{B}}{|\vec{A}||\vec{B}|}$ Proyección de $\vec{A}$ sobre $\vec{B}$: $\text{Proj}_{\vec{B}}\vec{A} = (\vec{A} \cdot \hat{u}_B)\hat{u}_B$ Producto cruz: $\vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} + (A_z B_x - A_x B_z)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$ Momento de una Fuerza Respecto a un punto O: $\vec{M}_O = \vec{r} \times \vec{F}$ Magnitud en 2D: $M_O = Fd$ (donde $d$ es el brazo de momento) Respecto a un eje a: $M_a = \hat{u}_a \cdot (\vec{r} \times \vec{F})$ Par de fuerzas: $\vec{M} = \vec{r} \times \vec{F}$ (donde $\vec{r}$ es el vector de posición de $\vec{F}$ a $-\vec{F}$) Equilibrio de una Partícula Condición: $\sum \vec{F} = \vec{0}$ En 2D: $\sum F_x = 0$, $\sum F_y = 0$ En 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ Equilibrio de un Cuerpo Rígido Condiciones: $\sum \vec{F} = \vec{0}$, $\sum \vec{M}_O = \vec{0}$ En 2D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum M_O = 0$ En 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$, $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ Tipos de apoyo (reacciones): Cable: 1 fuerza (tensión) Rodillo: 1 fuerza (normal a la superficie) Superficie lisa: 1 fuerza (normal a la superficie) Pasador sin fricción: 2 fuerzas (componentes $F_x, F_y$) Soporte fijo: 3 fuerzas ($F_x, F_y, M_z$) en 2D; 3 fuerzas y 3 momentos en 3D Centro de Gravedad e Inercia Centroide de un área: $\bar{x} = \frac{\int x dA}{\int dA}$, $\bar{y} = \frac{\int y dA}{\int dA}$ Centroide de un volumen: $\bar{x} = \frac{\int x dV}{\int dV}$, etc. Momento de inercia de un área: $I_x = \int y^2 dA$, $I_y = \int x^2 dA$ Radio de giro: $k = \sqrt{I/A}$ Teorema de los ejes paralelos: $I = I_{CG} + Ad^2$ Fricción Fricción estática máxima: $F_s = \mu_s N$ Fricción cinética: $F_k = \mu_k N$ Ángulo de fricción estática: $\phi_s = \arctan(\mu_s)$ Ángulo de fricción cinética: $\phi_k = \arctan(\mu_k)$ Para movimiento inminente, $F_f = \mu_s N$. Una vez en movimiento, $F_f = \mu_k N$. Cinemática de una Partícula (Movimiento Rectilíneo) Velocidad: $v = \frac{ds}{dt}$ Aceleración: $a = \frac{dv}{dt} = \frac{d^2s}{dt^2}$ Relación $a, v, s$: $a \, ds = v \, dv$ Aceleración constante: $v = v_0 + at$ $s = s_0 + v_0 t + \frac{1}{2} a t^2$ $v^2 = v_0^2 + 2a(s - s_0)$ Cinemática de una Partícula (Movimiento Curvilíneo) Coordenadas rectangulares: $\vec{v} = \dot{x}\hat{i} + \dot{y}\hat{j} + \dot{z}\hat{k}$ $\vec{a} = \ddot{x}\hat{i} + \ddot{y}\hat{j} + \ddot{z}\hat{k}$ Coordenadas normal-tangencial: $\vec{v} = v\hat{u}_t$ (donde $v = \dot{s}$) $\vec{a} = \dot{v}\hat{u}_t + \frac{v^2}{\rho}\hat{u}_n$ $\rho$ es el radio de curvatura Coordenadas cilíndricas: $\vec{v} = \dot{r}\hat{u}_r + r\dot{\theta}\hat{u}_\theta + \dot{z}\hat{u}_z$ $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\hat{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{u}_\theta + \ddot{z}\hat{u}_z$ Cinética de una Partícula Segunda Ley de Newton: $\sum \vec{F} = m\vec{a}$ Ecuaciones de movimiento: Rectangulares: $\sum F_x = ma_x$, $\sum F_y = ma_y$, $\sum F_z = ma_z$ Normal-Tangencial: $\sum F_t = ma_t$, $\sum F_n = ma_n = m\frac{v^2}{\rho}$ Cilíndricas: $\sum F_r = ma_r$, $\sum F_\theta = ma_\theta$, $\sum F_z = ma_z$ Trabajo y Energía Trabajo de una fuerza: $U = \int \vec{F} \cdot d\vec{r}$ Fuerza constante: $U = F \cos\theta \cdot s$ Peso: $U_g = -W \Delta y$ Resorte: $U_s = \frac{1}{2}k(s_1^2 - s_2^2)$ Energía cinética: $T = \frac{1}{2}mv^2$ Principio trabajo-energía: $T_1 + \sum U_{1-2} = T_2$ Fuerzas conservativas: Peso: $V_g = Wy$ Resorte: $V_e = \frac{1}{2}ks^2$ Energía mecánica total: $E = T + V_g + V_e$ Conservación de la energía: $T_1 + V_1 = T_2 + V_2$ (si solo actúan fuerzas conservativas) Impulso y Cantidad de Movimiento Cantidad de movimiento lineal: $\vec{L} = m\vec{v}$ Impulso lineal: $\text{Imp} = \int \vec{F} dt$ Principio de impulso-cantidad de movimiento: $m\vec{v}_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m\vec{v}_2$ Conservación de la cantidad de movimiento: $\sum (m\vec{v})_1 = \sum (m\vec{v})_2$ (si la fuerza externa neta es cero) Impacto: Coeficiente de restitución: $e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1}$ Impacto central: $e=1$ (elástico), $e=0$ (plástico) Cinemática de un Cuerpo Rígido (Movimiento de Traslación) Todo punto del cuerpo tiene la misma velocidad y aceleración. $\vec{v}_B = \vec{v}_A$ $\vec{a}_B = \vec{a}_A$ Cinemática de un Cuerpo Rígido (Rotación alrededor de un Eje Fijo) Velocidad angular: $\omega = \frac{d\theta}{dt}$ Aceleración angular: $\alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2}$ Relación $\alpha, \omega, \theta$: $\alpha \, d\theta = \omega \, d\omega$ Aceleración angular constante: $\omega = \omega_0 + \alpha t$ $\theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha t^2$ $\omega^2 = \omega_0^2 + 2\alpha(\theta - \theta_0)$ Velocidad de un punto: $v = \omega r$ Aceleración de un punto: $a_t = \alpha r$, $a_n = \omega^2 r$, $a = \sqrt{a_t^2 + a_n^2}$ Cinemática de un Cuerpo Rígido (Movimiento Plano General) Velocidad: $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$ Aceleración: $\vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$ Cinética de un Cuerpo Rígido Ecuaciones de movimiento: $\sum F_x = m(\bar{a}_x)$ $\sum F_y = m(\bar{a}_y)$ $\sum M_G = I_G \alpha$ (momento respecto al centro de masa G) $\sum M_P = I_P \alpha$ (momento respecto a un punto fijo P, o un punto con $a_P=0$) Momento de inercia de masa: $I = \int r^2 dm$ Teorema de los ejes paralelos (masa): $I = I_G + md^2$ Trabajo, Energía e Impulso (Cuerpo Rígido) Energía cinética: Traslación: $T = \frac{1}{2}m\bar{v}^2$ Rotación: $T = \frac{1}{2}I_O \omega^2$ (eje fijo O) Movimiento plano general: $T = \frac{1}{2}m\bar{v}^2 + \frac{1}{2}I_G \omega^2$ Principio trabajo-energía: $T_1 + \sum U_{1-2} = T_2$ Conservación de la energía: $T_1 + V_1 = T_2 + V_2$ Cantidad de movimiento angular: $H_O = I_O \omega$ Principio de impulso angular: $(H_O)_1 + \sum \int M_O dt = (H_O)_2$