Hibbeler 공학 역학 요점
Cheatsheet Content
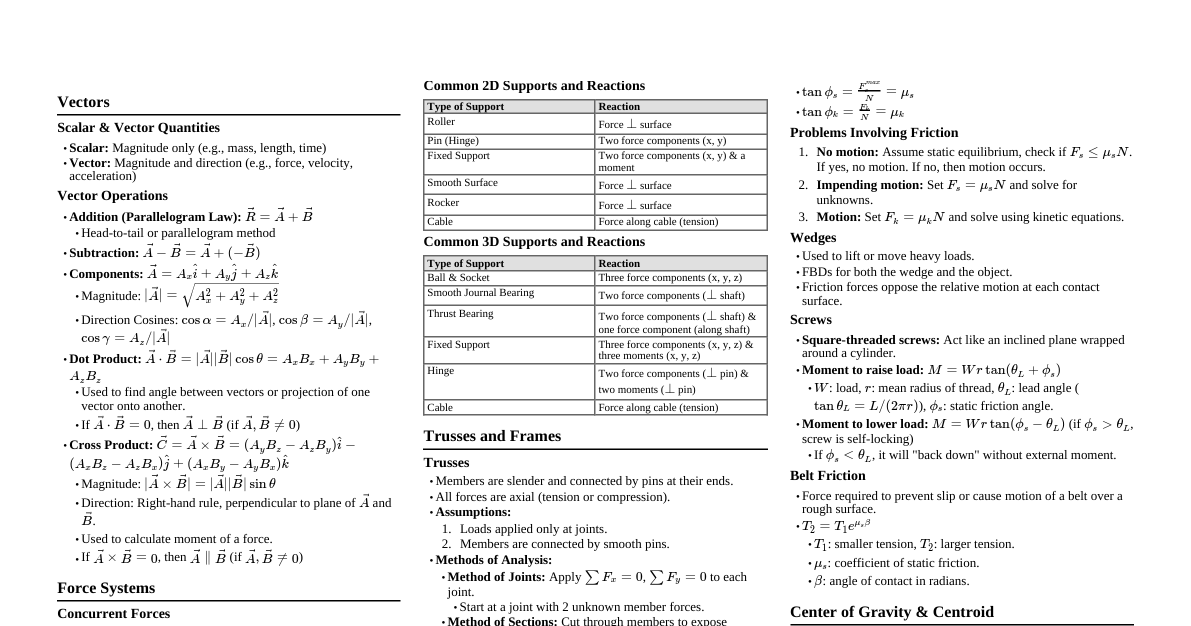
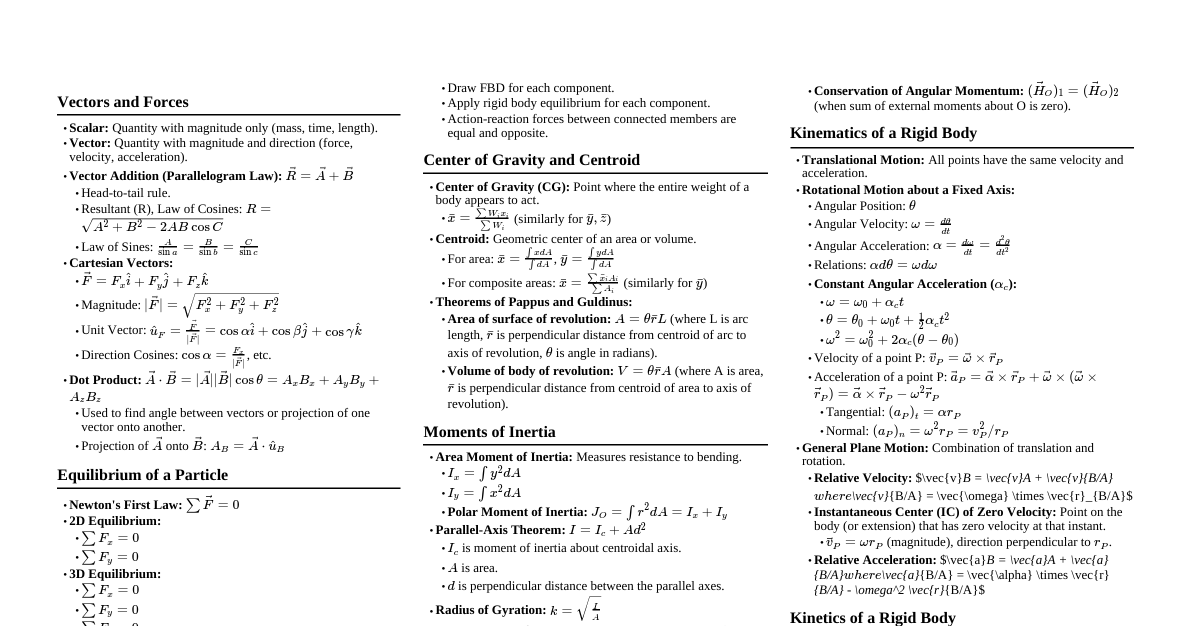
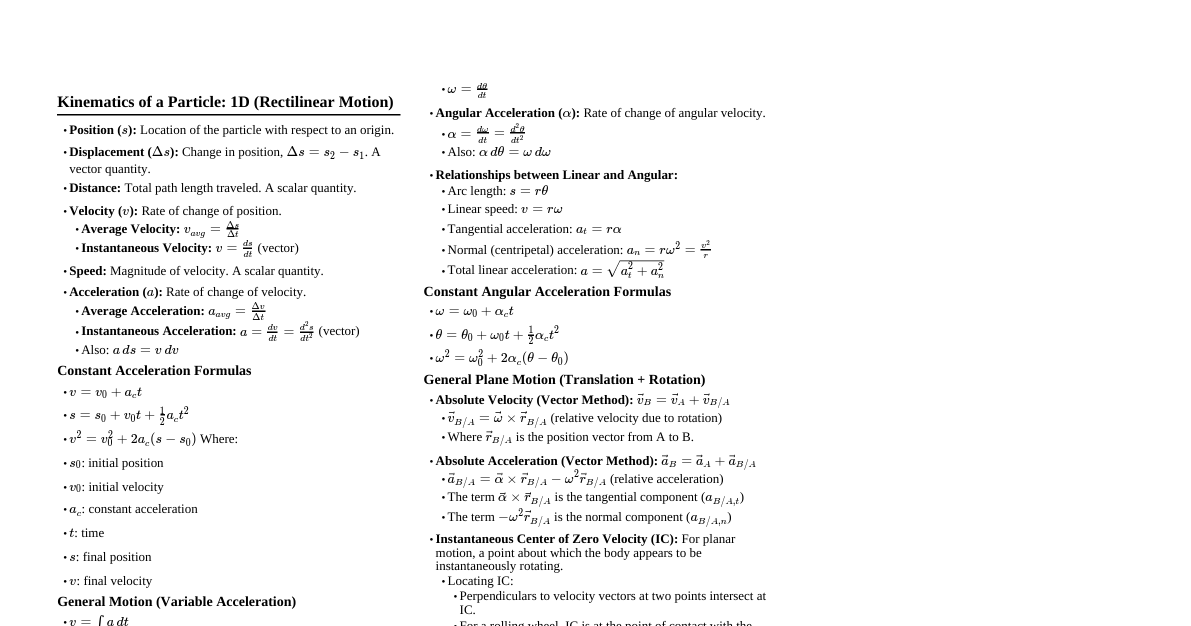
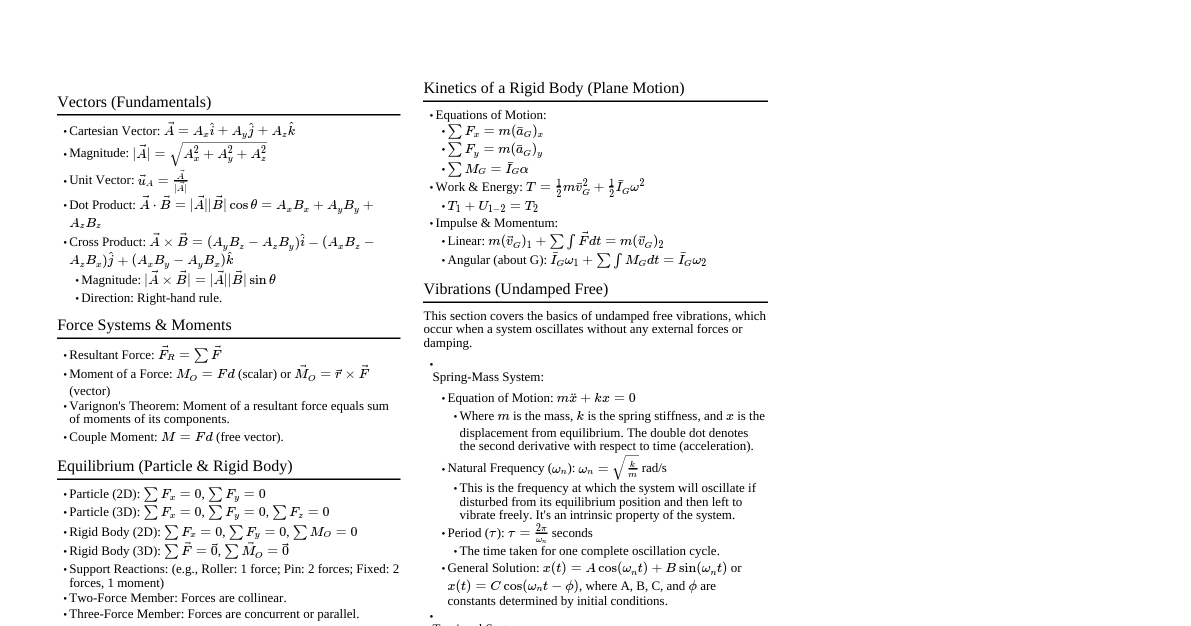
1. 벡터 연산 스칼라 곱 (내적): $\mathbf{A} \cdot \mathbf{B} = |\mathbf{A}| |\mathbf{B}| \cos\theta = A_x B_x + A_y B_y + A_z B_z$ 벡터 곱 (외적): $\mathbf{C} = \mathbf{A} \times \mathbf{B}$, $|\mathbf{C}| = |\mathbf{A}| |\mathbf{B}| \sin\theta$ 방향: 오른손 법칙 성분: $\mathbf{A} \times \mathbf{B} = (A_y B_z - A_z B_y)\mathbf{i} + (A_z B_x - A_x B_z)\mathbf{j} + (A_x B_y - A_y B_x)\mathbf{k}$ 단위 벡터: $\mathbf{u}_A = \mathbf{A} / |\mathbf{A}|$ 위치 벡터: $\mathbf{r} = (x_2 - x_1)\mathbf{i} + (y_2 - y_1)\mathbf{j} + (z_2 - z_1)\mathbf{k}$ 2. 평형 (정역학) 2.1. 입자의 평형 2D: $\sum F_x = 0$, $\sum F_y = 0$ 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ 2.2. 강체의 평형 2D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum M_O = 0$ 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$, $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ 모멘트 (Moment): $\mathbf{M}_O = \mathbf{r} \times \mathbf{F}$ 3. 구조 해석 3.1. 트러스 (Trusses) 절점법 (Method of Joints): 각 절점의 평형 ($ \sum F_x = 0, \sum F_y = 0 $) 단면법 (Method of Sections): 전체 평형 및 절단된 단면의 평형 ($ \sum F_x = 0, \sum F_y = 0, \sum M = 0 $) 영력 부재 (Zero-Force Members): 두 비선형 부재가 만나는 절점에 외력이 없으면 두 부재는 영력 부재. 세 부재 중 두 부재가 선형이고 외력이 없으면 세 번째 부재는 영력 부재. 3.2. 프레임 및 기계 (Frames and Machines) 각 부재를 분리하여 자유 물체도를 그림. 핀 연결부에는 미지 반력 성분 ($F_x, F_y$)이 작용. 4. 마찰 (Friction) 정지 마찰력: $F_s \le \mu_s N$ (최대 정지 마찰력: $F_{s,max} = \mu_s N$) 운동 마찰력: $F_k = \mu_k N$ $\mu_s > \mu_k$ 마찰각 (Angle of Friction): $\tan\phi_s = \mu_s$ 쐐기 (Wedges): 쐐기의 평형 및 마찰력 고려. 나사 (Screws): 나선의 경사면을 따라 작용하는 힘으로 분석. 5. 도심과 관성 모멘트 5.1. 도심 (Centroid) 면적 도심: $\bar{x} = \frac{\int x dA}{\int dA}$, $\bar{y} = \frac{\int y dA}{\int dA}$ 복합 면적: $\bar{x} = \frac{\sum \bar{x}_i A_i}{\sum A_i}$, $\bar{y} = \frac{\sum \bar{y}_i A_i}{\sum A_i}$ 5.2. 관성 모멘트 (Moment of Inertia) 면적 관성 모멘트: $I_x = \int y^2 dA$, $I_y = \int x^2 dA$ 평행축 정리 (Parallel-Axis Theorem): $I = \bar{I} + Ad^2$ 극 관성 모멘트: $J_O = I_x + I_y$ 6. 운동학 (Kinematics) - 입자 6.1. 직선 운동 속도: $v = ds/dt$ 가속도: $a = dv/dt = d^2s/dt^2$ 변위, 속도, 가속도 관계: $a ds = v dv$ 등가속도 운동: $v = v_0 + a_c t$ $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$ $v^2 = v_0^2 + 2 a_c (s - s_0)$ 6.2. 곡선 운동 직교 좌표계: $\mathbf{r} = x\mathbf{i} + y\mathbf{j} + z\mathbf{k}$, $\mathbf{v} = \dot{x}\mathbf{i} + \dot{y}\mathbf{j} + \dot{z}\mathbf{k}$, $\mathbf{a} = \ddot{x}\mathbf{i} + \ddot{y}\mathbf{j} + \ddot{z}\mathbf{k}$ 법선-접선 좌표계: $v = \dot{s}$ $a_t = \dot{v} = d^2s/dt^2$ (접선 가속도) $a_n = v^2/\rho$ (법선 가속도, $\rho$: 곡률 반경) $|\mathbf{a}| = \sqrt{a_t^2 + a_n^2}$ 원통 좌표계: $\mathbf{v} = \dot{r}\mathbf{u}_r + r\dot{\theta}\mathbf{u}_\theta + \dot{z}\mathbf{u}_z$ $\mathbf{a} = (\ddot{r} - r\dot{\theta}^2)\mathbf{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\mathbf{u}_\theta + \ddot{z}\mathbf{u}_z$ 7. 운동역학 (Kinetics) - 입자 7.1. 뉴턴의 제2법칙 $\sum \mathbf{F} = m\mathbf{a}$ 직교 좌표계: $\sum F_x = ma_x$, $\sum F_y = ma_y$, $\sum F_z = ma_z$ 법선-접선 좌표계: $\sum F_t = ma_t$, $\sum F_n = ma_n = m(v^2/\rho)$ 원통 좌표계: $\sum F_r = m a_r$, $\sum F_\theta = m a_\theta$, $\sum F_z = m a_z$ 7.2. 일과 에너지 일 (Work): $U_{1-2} = \int \mathbf{F} \cdot d\mathbf{r}$ 운동 에너지 (Kinetic Energy): $T = \frac{1}{2}mv^2$ 일-에너지 원리: $T_1 + U_{1-2} = T_2$ 위치 에너지 (Potential Energy): 중력: $V_g = mgh$ 탄성: $V_e = \frac{1}{2}ks^2$ 에너지 보존: $T_1 + V_1 = T_2 + V_2$ (보존력만 작용할 때) 7.3. 충격량과 운동량 선형 운동량: $\mathbf{p} = m\mathbf{v}$ 선형 충격량: $\text{Imp} = \int \mathbf{F} dt$ 선형 충격량-운동량 원리: $m\mathbf{v}_1 + \sum \int_{t_1}^{t_2} \mathbf{F} dt = m\mathbf{v}_2$ 충돌 (Impact): 반발 계수 (Coefficient of Restitution): $e = \frac{(v_B')_n - (v_A')_n}{(v_A)_n - (v_B)_n}$ 완전 탄성 충돌: $e=1$ 완전 비탄성 충돌: $e=0$ 8. 운동학 (Kinematics) - 강체 8.1. 강체의 평면 운동 병진 (Translation): $\mathbf{v}_B = \mathbf{v}_A$, $\mathbf{a}_B = \mathbf{a}_A$ 고정축 회전 (Rotation about a Fixed Axis): $\omega = d\theta/dt$, $\alpha = d\omega/dt = d^2\theta/dt^2$ $v = \omega r$, $a_t = \alpha r$, $a_n = \omega^2 r = v^2/r$ 일반 평면 운동 (General Plane Motion): $\mathbf{v}_B = \mathbf{v}_A + \mathbf{\omega} \times \mathbf{r}_{B/A}$ $\mathbf{a}_B = \mathbf{a}_A + \mathbf{\alpha} \times \mathbf{r}_{B/A} - \omega^2 \mathbf{r}_{B/A}$ 순간 중심 (Instantaneous Center, IC): 속도 분석에 사용 ($\mathbf{v}_P = \mathbf{\omega} \times \mathbf{r}_{P/IC}$) 9. 운동역학 (Kinetics) - 강체 9.1. 평면 운동 운동 방정식: $\sum F_x = m(\mathbf{a}_G)_x$ $\sum F_y = m(\mathbf{a}_G)_y$ $\sum M_G = I_G \alpha$ (질량 중심 G에 대한 모멘트) $\sum M_P = I_P \alpha$ (고정점 P에 대한 모멘트, $I_P = I_G + md^2$) 운동 에너지: $T = \frac{1}{2}m v_G^2 + \frac{1}{2}I_G \omega^2$ 일-에너지 원리: $T_1 + U_{1-2} = T_2$ 각운동량 (Angular Momentum): $\mathbf{H}_G = I_G \mathbf{\omega}$ 각충격량-운동량 원리: $(H_G)_1 + \sum \int_{t_1}^{t_2} M_G dt = (H_G)_2$ 9.2. 3D 운동학 및 운동역학 오일러 각 (Euler Angles): 강체 방향을 정의하는 세 각. 질량 관성 텐서 (Mass Moment of Inertia Tensor): $I = \begin{pmatrix} I_{xx} & -I_{xy} & -I_{xz} \\ -I_{yx} & I_{yy} & -I_{yz} \\ -I_{zx} & -I_{zy} & I_{zz} \end{pmatrix}$ 오일러 방정식 (Euler's Equations of Motion): 회전 운동을 기술.