JEE Advanced Mechanics
Shared 5/13/2026•0 views
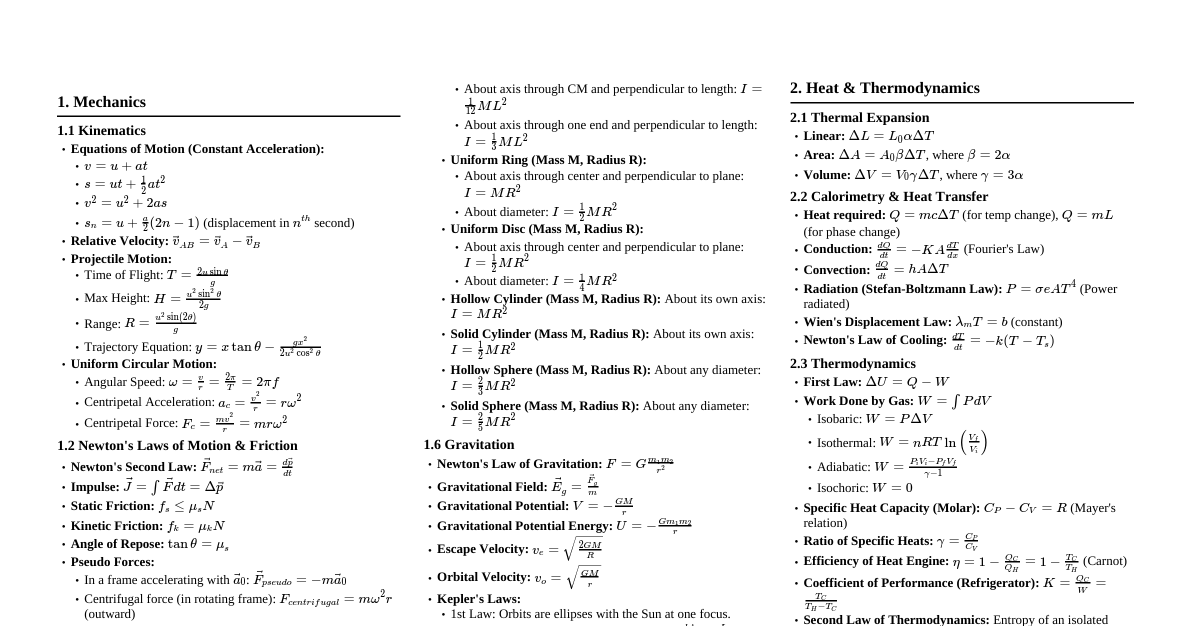
### 1. Kinematics - **Constant Acceleration:** - $v = u + at$ - $s = ut + \frac{1}{2}at^2$ - $v^2 = u^2 + 2as$ - $s_n = u + \frac{a}{2}(2n-1)$ (Displacement in $n^{th}$ second) - **Projectile Motion (Ground to Ground):** - Time of Flight ($T$): $\frac{2u\sin\theta}{g}$ - Max Height ($H$): $\frac{u^2\sin^2\theta}{2g}$ - Range ($R$): $\frac{u^2\sin(2\theta)}{g}$ - Trajectory: $y = x\tan\theta - \frac{gx^2}{2u^2\cos^2\theta}$ - **Advanced Projectile Motion:** - **Inclined Plane:** - Up the incline: $T = \frac{2u\sin(\theta-\alpha)}{g\cos\alpha}$, $R = \frac{2u^2\sin(\theta-\alpha)\cos\theta}{g\cos^2\alpha}$ - Down the incline: $T = \frac{2u\sin(\theta+\alpha)}{g\cos\alpha}$, $R = \frac{2u^2\sin(\theta+\alpha)\cos\theta}{g\cos^2\alpha}$ - **Relative Motion:** $\vec{v}_{AB} = \vec{v}_A - \vec{v}_B$, $\vec{a}_{AB} = \vec{a}_A - \vec{a}_B$ - **River-Boat Problems:** - Shortest time: $t = d/v_b$ (boat perpendicular to river) - Shortest path: $v_b \ge v_r$, steer at $\sin\theta = v_r/v_b$ upstream. $t = d/\sqrt{v_b^2 - v_r^2}$ #### JEE Advanced PYQ Example: A particle is projected from the ground with speed $u$ at an angle $\theta$ with horizontal. The magnitude of average velocity of particle between the time of projection and its return to the ground is: **Solution:** The particle starts from origin (0,0) and returns to (R,0). Displacement $\Delta \vec{r} = R\hat{i}$. Time taken $\Delta t = T = \frac{2u\sin\theta}{g}$. Average velocity $\vec{v}_{avg} = \frac{\Delta \vec{r}}{\Delta t} = \frac{R\hat{i}}{T} = \frac{(u^2\sin(2\theta)/g)\hat{i}}{2u\sin\theta/g} = \frac{u^2(2\sin\theta\cos\theta)\hat{i}}{2u\sin\theta} = u\cos\theta \hat{i}$. Magnitude: $u\cos\theta$. ### 2. Newton's Laws & Friction - **Newton's Laws:** - First Law: Inertia - Second Law: $\vec{F}_{net} = m\vec{a}$ - Third Law: Action-Reaction pairs - **Friction:** - Static friction: $f_s \le \mu_s N$ - Kinetic friction: $f_k = \mu_k N$ - $\mu_s \ge \mu_k$ - **Pseudo Force:** $\vec{F}_{pseudo} = -m\vec{a}_0$ (for non-inertial frame with acceleration $\vec{a}_0$) - **Advanced Cases:** - **Blocks on Blocks:** Analyze each block using FBDs. - **Wedge Problems:** Often use pseudo force or resolve forces along/perpendicular to wedge. - **Atwood Machine (Modified):** System acceleration and tensions. #### JEE Advanced PYQ Example: A block of mass $m$ is placed on a smooth inclined wedge of mass $M$ and inclination $\theta$. The wedge is placed on a smooth horizontal surface. The acceleration of the wedge is: **Solution:** Let $a_w$ be the acceleration of the wedge to the right. Let $a_b$ be the acceleration of the block relative to the wedge down the incline. The normal force $N$ from the wedge on the block has components: $N_x = N\sin\theta$ (horizontal) $N_y = N\cos\theta$ (vertical) For the wedge (mass $M$): $N\sin\theta = Ma_w$ (horizontal motion) For the block (mass $m$): Consider a frame attached to the wedge (non-inertial). Pseudo force $ma_w$ acts on the block horizontally to the left. Along the incline: $mg\sin\theta - ma_w\cos\theta = ma_b$ Perpendicular to the incline: $N - mg\cos\theta - ma_w\sin\theta = 0 \implies N = mg\cos\theta + ma_w\sin\theta$ Substitute $N$ from wedge equation: $N = Ma_w/\sin\theta$. $Ma_w/\sin\theta = mg\cos\theta + ma_w\sin\theta$ $Ma_w = mg\sin\theta\cos\theta + ma_w\sin^2\theta$ $a_w(M - m\sin^2\theta) = mg\sin\theta\cos\theta$ $a_w = \frac{mg\sin\theta\cos\theta}{M + m\sin^2\theta}$ This is incorrect. The pseudo force is $ma_w$ opposite to $a_w$. So, $N = mg\cos\theta + ma_w\sin\theta$ is correct. From $N\sin\theta = Ma_w \implies N = Ma_w/\sin\theta$. Equating $N$: $Ma_w/\sin\theta = mg\cos\theta + ma_w\sin\theta$ $Ma_w = mg\sin\theta\cos\theta + ma_w\sin^2\theta$ $a_w(M - m\sin^2\theta) = mg\sin\theta\cos\theta$. The correct FBD for the block in ground frame implies: Horizontal acceleration of block: $a_{bx} = a_w - a_b\cos\theta$ (if $a_b$ is relative) Vertical acceleration of block: $a_{by} = a_b\sin\theta$ This problem is better solved with constraint equations and ground frame. Let $a_x$ be horizontal acceleration of block, $a_y$ be vertical acceleration of block. For wedge: $N\sin\theta = Ma_w$ For block: $mg - N\cos\theta = ma_y$ $N\sin\theta = ma_x$ Constraint: Block stays on wedge. Relative acceleration perpendicular to incline is zero. $a_y\cos\theta + (a_x - a_w)\sin\theta = 0$ $a_w = \frac{mg\sin\theta\cos\theta}{M+m\sin^2\theta}$ (This is for the block to slide down and the wedge to accelerate) The question asks for acceleration of wedge: $a_w = \frac{mg\sin\theta\cos\theta}{M+m\sin^2\theta}$. Final expression for $a_w$: $a_w = \frac{mg\sin\theta\cos\theta}{M+m\sin^2\theta}$ (This is the standard result, assuming smooth surfaces). ### 3. Work, Energy & Power - **Work Done:** $W = \int \vec{F} \cdot d\vec{r} = Fs\cos\theta$ - **Kinetic Energy:** $K = \frac{1}{2}mv^2$ - **Potential Energy:** $U_g = mgh$, $U_s = \frac{1}{2}kx^2$ - **Work-Energy Theorem:** $W_{net} = \Delta K$ - **Conservative Forces:** Work done is path independent, $\vec{F} = -\nabla U$ - **Non-Conservative Forces:** Work done is path dependent (e.g., friction) - **Power:** $P = \frac{dW}{dt} = \vec{F} \cdot \vec{v}$ - **Conservation of Mechanical Energy:** $K_i + U_i = K_f + U_f$ (only if conservative forces do work) - **Advanced Cases:** - **Variable Force:** Use integration $W = \int F(x) dx$. - **Circular Motion with Energy:** Combine energy conservation with centripetal force. - **Vertical Circle:** Minimum speed at top to complete circle: $v_{top} = \sqrt{gR}$. - **Power of a Pump:** $P = \frac{dm}{dt}gh + \frac{1}{2}\frac{dm}{dt}v^2$. #### JEE Advanced PYQ Example: A block of mass $m$ is released from rest at a height $h$ on a smooth curved track. It slides down and enters a rough horizontal surface where the coefficient of kinetic friction is $\mu$. Find the distance it travels on the rough surface before coming to rest. **Solution:** From energy conservation on the smooth track: Initial energy $E_i = mgh$. Final energy at entry to rough surface $E_f = \frac{1}{2}mv^2$. So, $mgh = \frac{1}{2}mv^2 \implies v = \sqrt{2gh}$. On the rough horizontal surface, work done by friction brings it to rest. Work-Energy Theorem: $W_{nc} = \Delta K$. Here, $W_{nc} = W_{friction} = -f_k \cdot x$, where $x$ is the distance travelled. $f_k = \mu N = \mu mg$. So, $W_{friction} = -\mu mg x$. $\Delta K = K_f - K_i = 0 - \frac{1}{2}mv^2 = -\frac{1}{2}m(2gh) = -mgh$. $-\mu mg x = -mgh$ $x = \frac{h}{\mu}$. ### 4. Center of Mass & Momentum - **Center of Mass (CM):** - Discrete: $\vec{R}_{CM} = \frac{\sum m_i \vec{r}_i}{\sum m_i}$ - Continuous: $\vec{R}_{CM} = \frac{\int \vec{r} dm}{\int dm}$ - **Momentum:** $\vec{p} = m\vec{v}$ - **Impulse:** $\vec{J} = \int \vec{F} dt = \Delta \vec{p}$ - **Conservation of Momentum:** If $\vec{F}_{ext,net} = 0$, then $\sum \vec{p}_i = \sum \vec{p}_f$ - **Collisions:** - **Elastic:** Momentum and Kinetic Energy conserved. $e=1$. - **Inelastic:** Momentum conserved, KE not conserved. $0 ### 5. Rotational Dynamics - **Angular Kinematics (Constant Angular Acceleration):** - $\omega = \omega_0 + \alpha t$ - $\theta = \omega_0 t + \frac{1}{2}\alpha t^2$ - $\omega^2 = \omega_0^2 + 2\alpha\theta$ - **Relation between Linear and Angular:** $v = r\omega$, $a_t = r\alpha$, $a_c = r\omega^2 = v^2/r$ - **Moment of Inertia ($I$):** - Discrete: $I = \sum m_i r_i^2$ - Continuous: $I = \int r^2 dm$ - **Parallel Axis Theorem:** $I = I_{CM} + Md^2$ - **Perpendicular Axis Theorem:** $I_z = I_x + I_y$ (for planar objects) - **Torque ($\tau$):** $\vec{\tau} = \vec{r} \times \vec{F}$, $\tau = I\alpha$ - **Angular Momentum ($\vec{L}$):** $\vec{L} = \vec{r} \times \vec{p} = I\vec{\omega}$ - **Conservation of Angular Momentum:** If $\vec{\tau}_{ext,net} = 0$, then $\vec{L}_{initial} = \vec{L}_{final}$ - **Rotational Kinetic Energy:** $K_{rot} = \frac{1}{2}I\omega^2$ - **Total Kinetic Energy (Rolling):** $K_{total} = K_{trans} + K_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ - **Rolling without Slipping:** $v_{CM} = R\omega$, $a_{CM} = R\alpha$ - **Advanced Cases:** - **Combined Translation and Rotation:** Apply $\vec{F}_{net} = M\vec{a}_{CM}$ and $\vec{\tau}_{CM} = I_{CM}\alpha$. - **Rolling on an Inclined Plane:** Use energy conservation or NLM. - **Precession of Gyroscope:** $\tau = dL/dt$. - **Angular Impulse:** $\int \tau dt = \Delta L$. #### JEE Advanced PYQ Example: A solid sphere of mass $M$ and radius $R$ is rolling without slipping on a horizontal surface with angular velocity $\omega_0$. It then rolls up an inclined plane making an angle $\theta$ with the horizontal. If the inclined plane is sufficiently long, the maximum height reached by the sphere is: **Solution:** Initial energy (at the bottom of incline): Total kinetic energy, as $h=0$. $E_i = K_{trans} + K_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega_0^2$. For rolling without slipping, $v_{CM} = R\omega_0$. For a solid sphere, $I_{CM} = \frac{2}{5}MR^2$. $E_i = \frac{1}{2}M(R\omega_0)^2 + \frac{1}{2}(\frac{2}{5}MR^2)\omega_0^2 = \frac{1}{2}MR^2\omega_0^2 + \frac{1}{5}MR^2\omega_0^2 = (\frac{5+2}{10})MR^2\omega_0^2 = \frac{7}{10}MR^2\omega_0^2$. At the maximum height $h$, the sphere momentarily comes to rest (both translational and rotational). Final energy $E_f = Mgh$. By conservation of mechanical energy (friction is static friction and does no work): $E_i = E_f$ $\frac{7}{10}MR^2\omega_0^2 = Mgh$ $h = \frac{7}{10}\frac{R^2\omega_0^2}{g}$. ### 6. Gravitation - **Newton's Law:** $F = \frac{Gm_1m_2}{r^2}$ - **Potential Energy:** $U = -\frac{Gm_1m_2}{r}$ - **Potential:** $V = -\frac{GM}{r}$ - **Field Intensity:** $\vec{E} = -\frac{GM}{r^2}\hat{r}$ - **Acceleration due to Gravity ($g$):** - Surface: $g = \frac{GM}{R^2}$ - Altitude $h$: $g' = g(1 - \frac{2h}{R})$ for $h \ll R$, $g' = \frac{GM}{(R+h)^2}$ (exact) - Depth $d$: $g' = g(1 - \frac{d}{R})$ - Rotation of Earth: $g_{eff} = g - R\omega^2\cos^2\phi$ (at latitude $\phi$) - **Escape Velocity:** $v_e = \sqrt{\frac{2GM}{R}}$ - **Orbital Velocity:** $v_o = \sqrt{\frac{GM}{r}}$ (circular orbit) - **Time Period of Satellite:** $T = 2\pi\sqrt{\frac{r^3}{GM}}$ - **Kepler's Laws:** 1. Orbits are ellipses with sun at one focus. 2. Equal areas in equal times ($\frac{dA}{dt} = \frac{L}{2m} = \text{constant}$). 3. $T^2 \propto a^3$ (for planets, $a$ is semi-major axis). - **Advanced Cases:** - **Gravitational Field/Potential for Non-Uniform/Extended Bodies:** Use integration (e.g., ring, disc, sphere). - **Cavity Problems:** Use superposition principle. - **Binary Star Systems:** CM remains stationary, individual stars orbit CM. - **Energy of Satellite:** Total Energy $E = -\frac{GMm}{2r}$. - **Transfer Orbits (Hohmann Transfer):** Elliptical path between two circular orbits. #### JEE Advanced PYQ Example: A satellite is revolving in an elliptical orbit around the Earth. The maximum and minimum distances of the satellite from the center of the Earth are $R_{max}$ and $R_{min}$ respectively. Find the ratio of the maximum speed to the minimum speed of the satellite. **Solution:** For a satellite in an elliptical orbit, angular momentum is conserved. At apogee (maximum distance $R_{max}$), the speed is minimum ($v_{min}$), and the velocity vector is perpendicular to the position vector. At perigee (minimum distance $R_{min}$), the speed is maximum ($v_{max}$), and the velocity vector is perpendicular to the position vector. Conservation of angular momentum about the center of Earth: $L_{apogee} = L_{perigee}$ $m v_{min} R_{max} = m v_{max} R_{min}$ $\frac{v_{max}}{v_{min}} = \frac{R_{max}}{R_{min}}$. ### 7. Fluid Mechanics - **Pressure:** $P = F/A$ - **Pressure due to Fluid Column:** $P = \rho gh$ - **Pascal's Law:** Pressure applied to enclosed fluid is transmitted undiminished. - **Archimedes' Principle:** Buoyant force $F_B = \rho_{fluid} V_{sub} g$ - **Equation of Continuity:** $A_1v_1 = A_2v_2 = \text{constant}$ (incompressible fluid) - **Bernoulli's Principle:** $P + \frac{1}{2}\rho v^2 + \rho gh = \text{constant}$ - **Torricelli's Law:** Speed of efflux $v = \sqrt{2gh}$ - **Viscosity:** - **Newton's Law of Viscosity:** $F = -\eta A \frac{dv}{dy}$ - **Stokes' Law:** $F_v = 6\pi\eta rv$ (for spherical body) - **Terminal Velocity:** When drag force equals buoyant force plus gravity. - **Surface Tension:** - $T = F/L$ - Excess pressure in bubble: $\Delta P = \frac{4T}{R}$ (soap bubble), $\Delta P = \frac{2T}{R}$ (liquid drop/air bubble inside liquid) - Capillary Rise: $h = \frac{2T\cos\theta}{\rho rg}$ - **Advanced Cases:** - **Manometers and Pressure Measurement:** Apply pressure equations. - **Floating/Sinking Conditions:** Relate object density to fluid density. - **Venturimeter:** Use Bernoulli's and continuity equations. - **Pitot Tube:** Measures flow speed. - **Forces on Submerged Bodies:** Integrate pressure over the surface. #### JEE Advanced PYQ Example: A large tank is filled with water to a height $H$. A small hole is made at a depth $h$ below the surface of water. Find the range of the water jet on the horizontal ground. **Solution:** Speed of efflux from the hole (Torricelli's Law): $v = \sqrt{2gh}$. The water jet exits horizontally. The remaining height of water from the hole to the ground is $H-h$. This is a projectile motion problem. Initial vertical velocity $u_y = 0$. Initial horizontal velocity $u_x = v = \sqrt{2gh}$. Vertical distance to fall $y = H-h$. Using $y = u_y t + \frac{1}{2}gt^2$: $H-h = 0 + \frac{1}{2}gt^2 \implies t = \sqrt{\frac{2(H-h)}{g}}$. Horizontal range $X = u_x t = \sqrt{2gh} \cdot \sqrt{\frac{2(H-h)}{g}} = \sqrt{4h(H-h)} = 2\sqrt{h(H-h)}$. ### 8. Simple Harmonic Motion (SHM) - **General Equation:** $x(t) = A\sin(\omega t + \phi)$ or $x(t) = A\cos(\omega t + \phi)$ - **Angular Frequency:** $\omega = \sqrt{k/m}$ (spring-mass), $\omega = \sqrt{g/L}$ (simple pendulum) - **Time Period:** $T = 2\pi/\omega$ - **Velocity:** $v(t) = A\omega\cos(\omega t + \phi) = \pm \omega \sqrt{A^2 - x^2}$ - **Acceleration:** $a(t) = -A\omega^2\sin(\omega t + \phi) = -\omega^2 x$ - **Energy in SHM:** - Kinetic Energy: $K = \frac{1}{2}m\omega^2(A^2 - x^2)$ - Potential Energy: $U = \frac{1}{2}kx^2 = \frac{1}{2}m\omega^2 x^2$ - Total Energy: $E = K+U = \frac{1}{2}kA^2 = \frac{1}{2}m\omega^2 A^2$ - **Advanced Cases:** - **Compound Pendulum:** $T = 2\pi\sqrt{\frac{I}{mgL}}$ where $L$ is distance from pivot to CM. - **Torsional Pendulum:** $T = 2\pi\sqrt{\frac{I}{C}}$ where $C$ is torsional constant. - **Springs in Series/Parallel:** $1/k_{eq} = 1/k_1 + 1/k_2$ (series); $k_{eq} = k_1 + k_2$ (parallel). - **Liquid in U-tube:** $T = 2\pi\sqrt{L/2g}$ where $L$ is total length of liquid column. - **Block floating in liquid:** Small vertical oscillations are SHM. - **Physical Pendulum:** Any rigid body oscillating about a fixed axis. #### JEE Advanced PYQ Example: A block of mass $m$ is attached to a spring of spring constant $k$. The block is pulled by $x_0$ from its equilibrium position and released. The maximum speed of the block is: **Solution:** When the block is at its equilibrium position, the spring force is zero. When it is pulled by $x_0$ and released, it starts oscillating in SHM. The amplitude of oscillation is $A = x_0$. The total energy of the oscillating system is conserved. At the extreme position (amplitude $x_0$), velocity is $0$, so $K=0$. All energy is potential: $E = U_{max} = \frac{1}{2}kx_0^2$. At the equilibrium position ($x=0$), potential energy is $U=0$. All energy is kinetic: $E = K_{max} = \frac{1}{2}mv_{max}^2$. By conservation of energy: $\frac{1}{2}kx_0^2 = \frac{1}{2}mv_{max}^2$ $v_{max}^2 = \frac{k}{m}x_0^2$ $v_{max} = x_0\sqrt{\frac{k}{m}}$. Also, we know $v_{max} = A\omega$, and $\omega = \sqrt{k/m}$, so $v_{max} = x_0\sqrt{k/m}$. ### 9. Elasticity - **Stress:** $\sigma = F/A$ (Normal), $\tau = F_t/A$ (Shear) - **Strain:** $\epsilon = \Delta L/L$ (Longitudinal), $\gamma = \Delta x/h$ (Shear), $\epsilon_v = \Delta V/V$ (Volumetric) - **Hooke's Law:** Stress $\propto$ Strain (within elastic limit) - **Young's Modulus ($Y$):** $Y = \frac{\text{Normal Stress}}{\text{Longitudinal Strain}} = \frac{F/A}{\Delta L/L}$ - **Bulk Modulus ($B$):** $B = \frac{\text{Volumetric Stress}}{\text{Volumetric Strain}} = \frac{-\Delta P}{\Delta V/V}$ - **Shear Modulus ($G$ or $\eta$):** $G = \frac{\text{Shear Stress}}{\text{Shear Strain}} = \frac{F_t/A}{\Delta x/h}$ - **Poisson's Ratio ($\nu$):** $\nu = -\frac{\text{Lateral Strain}}{\text{Longitudinal Strain}}$ - **Work Done in Stretching Wire (Elastic Potential Energy):** $U = \frac{1}{2} \text{Stress} \times \text{Strain} \times \text{Volume} = \frac{1}{2} \frac{Y A (\Delta L)^2}{L}$ - **Advanced Cases:** - **Thermal Stress:** $\sigma_{thermal} = Y\alpha\Delta T$. - **Composite Rods:** Analyze in series or parallel. - **Breaking Stress:** Maximum stress a material can withstand. - **Elastic Limit vs. Yield Point:** Distinction between recoverable and permanent deformation. #### JEE Advanced PYQ Example: A steel wire of length $L$ and cross-sectional area $A$ is stretched by $x$ length by a force $F$. The elastic potential energy stored in the wire is: **Solution:** Young's Modulus $Y = \frac{\text{Stress}}{\text{Strain}} = \frac{F/A}{x/L}$. So, $F = \frac{YAx}{L}$. The force applied is proportional to the extension $x$. This is similar to a spring with effective spring constant $k_{eff} = \frac{YA}{L}$. The elastic potential energy stored in the wire is given by the area under the Force-Extension graph, which is a triangle for linear elasticity (Hooke's Law). $U = \int F dx = \int_0^x \frac{YAt}{L} dt = \frac{YA}{L} [\frac{t^2}{2}]_0^x = \frac{1}{2}\frac{YAx^2}{L}$. Alternatively, using the formula: $U = \frac{1}{2} \text{Stress} \times \text{Strain} \times \text{Volume}$ Stress = $F/A$ Strain = $x/L$ Volume = $AL$ $U = \frac{1}{2} (\frac{F}{A}) (\frac{x}{L}) (AL) = \frac{1}{2} Fx$. Substitute $F = \frac{YAx}{L}$: $U = \frac{1}{2} (\frac{YAx}{L}) x = \frac{1}{2}\frac{YAx^2}{L}$.