Álgebra Lineal
Shared 5/6/2026•2 views
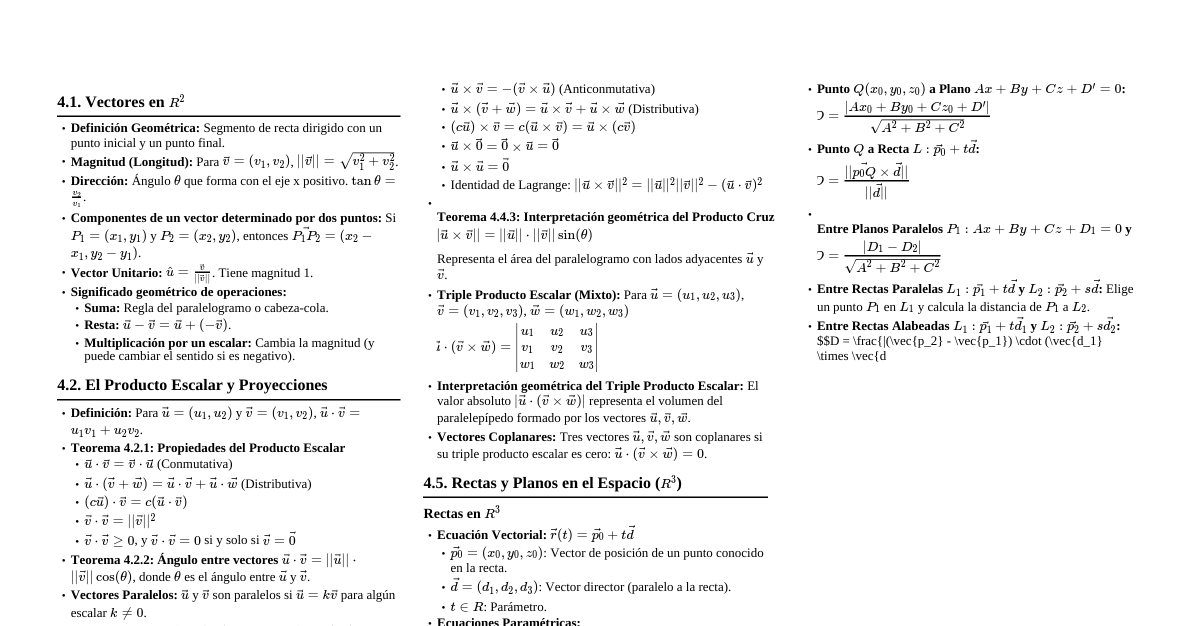
### Vectores - **Definición:** Un vector $\vec{v}$ en $\mathbb{R}^n$ es una lista ordenada de $n$ números reales $\vec{v} = (v_1, v_2, ..., v_n)$. - **Suma de Vectores:** $\vec{u} + \vec{v} = (u_1+v_1, u_2+v_2, ..., u_n+v_n)$ - **Multiplicación por Escalar:** $c\vec{v} = (cv_1, cv_2, ..., cv_n)$ - **Producto Punto (Escalar):** $\vec{u} \cdot \vec{v} = u_1v_1 + u_2v_2 + ... + u_nv_n = ||\vec{u}|| \ ||\vec{v}|| \cos\theta$ - **Magnitud (Norma):** $||\vec{v}|| = \sqrt{v_1^2 + v_2^2 + ... + v_n^2}$ - **Vector Unitario:** $\hat{v} = \frac{\vec{v}}{||\vec{v}||}$ ### Matrices - **Definición:** Un arreglo rectangular de números. Una matriz $A$ de tamaño $m \times n$ tiene $m$ filas y $n$ columnas. $$A = \begin{pmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \cdots & a_{mn} \end{pmatrix}$$ - **Suma de Matrices:** $A+B$ se define solo si $A$ y $B$ tienen el mismo tamaño. $(A+B)_{ij} = a_{ij} + b_{ij}$. - **Multiplicación por Escalar:** $(cA)_{ij} = c \cdot a_{ij}$. - **Matriz Transpuesta:** $A^T$. $(A^T)_{ij} = a_{ji}$. - **Matriz Identidad ($I$):** Matriz cuadrada con unos en la diagonal principal y ceros en el resto. $AI = IA = A$. - **Matriz Inversa ($A^{-1}$):** Para una matriz cuadrada $A$, si existe $A^{-1}$ tal que $AA^{-1} = A^{-1}A = I$. - Para una $2 \times 2$: Si $A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$, entonces $A^{-1} = \frac{1}{ad-bc} \begin{pmatrix} d & -b \\ -c & a \end{pmatrix}$, si $ad-bc \neq 0$. ### Multiplicación de Matrices - **Condición:** Para multiplicar $A$ (tamaño $m \times n$) por $B$ (tamaño $n \times p$), el número de columnas de $A$ debe ser igual al número de filas de $B$. - **Resultado:** La matriz producto $AB$ tendrá tamaño $m \times p$. - **Cálculo:** El elemento $(AB)_{ij}$ es el producto punto de la fila $i$ de $A$ con la columna $j$ de $B$. $$(AB)_{ij} = \sum_{k=1}^{n} a_{ik}b_{kj}$$ - **Propiedades:** - No conmutativa: $AB \neq BA$ (en general) - Asociativa: $(AB)C = A(BC)$ - Distributiva: $A(B+C) = AB+AC$ ### Determinantes - **Definición:** Un escalar asociado a una matriz cuadrada $A$, denotado como $\det(A)$ o $|A|$. - **Matriz $2 \times 2$:** Si $A = \begin{pmatrix} a & b \\ c & d \end{pmatrix}$, entonces $\det(A) = ad-bc$. - **Matriz $3 \times 3$ (Regla de Sarrus o Cofactores):** - **Cofactor $C_{ij} = (-1)^{i+j} M_{ij}$**, donde $M_{ij}$ es el determinante de la submatriz obtenida al eliminar la fila $i$ y la columna $j$. - $\det(A) = a_{11}C_{11} + a_{12}C_{12} + a_{13}C_{13}$ (expansión por primera fila). - **Propiedades:** - $\det(A^T) = \det(A)$ - $\det(AB) = \det(A)\det(B)$ - $\det(A^{-1}) = \frac{1}{\det(A)}$ - Si una fila o columna es cero, $\det(A) = 0$. - Si una fila es múltiplo de otra, $\det(A) = 0$. - $A$ es invertible si y solo si $\det(A) \neq 0$. ### Sistemas de Ecuaciones Lineales (SEL) - **Forma General:** $a_{11}x_1 + a_{12}x_2 + \dots + a_{1n}x_n = b_1$ $a_{21}x_1 + a_{22}x_2 + \dots + a_{2n}x_n = b_2$ $\vdots$ $a_{m1}x_1 + a_{m2}x_2 + \dots + a_{mn}x_n = b_m$ - **Forma Matricial:** $A\vec{x} = \vec{b}$, donde $A$ es la matriz de coeficientes, $\vec{x}$ es el vector de variables y $\vec{b}$ es el vector de términos constantes. - **Métodos de Solución:** - **Eliminación Gaussiana/Gauss-Jordan:** Reduce la matriz aumentada $[A|\vec{b}]$ a una forma escalonada (o escalonada reducida por filas). - **Regla de Cramer:** Para sistemas $n \times n$ con $\det(A) \neq 0$, $x_i = \frac{\det(A_i)}{\det(A)}$, donde $A_i$ es la matriz $A$ con la columna $i$ reemplazada por $\vec{b}$. - **Usando la Inversa:** Si $A$ es invertible, $\vec{x} = A^{-1}\vec{b}$. - **Tipos de Solución:** - **Solución Única:** Si $\det(A) \neq 0$ (para sistemas cuadrados) o si la forma escalonada reducida tiene pivotes en cada columna de $A$. - **Infinitas Soluciones:** Si hay variables libres después de la reducción por filas. - **No Tiene Solución:** Si la reducción por filas resulta en una fila de la forma $[0 \ 0 \dots 0 \ | \ k]$ donde $k \neq 0$. ### Sistemas Homogéneos - **Definición:** Un SEL de la forma $A\vec{x} = \vec{0}$. - **Siempre Trivial:** Siempre tienen la solución $\vec{x} = \vec{0}$ (solución trivial). - **Soluciones No Triviales:** Existen soluciones no triviales si y solo si: - $\det(A) = 0$ (para sistemas cuadrados). - El rango de $A$ es menor que el número de variables. - Hay variables libres en la forma escalonada reducida por filas. - **Espacio Nulo (Null Space):** El conjunto de todas las soluciones a $A\vec{x} = \vec{0}$ es un subespacio vectorial llamado espacio nulo de $A$. ### Espacios Vectoriales - **Definición:** Un conjunto $V$ de objetos (vectores) junto con dos operaciones (suma de vectores y multiplicación por escalar) que satisfacen 10 axiomas (cerradura, asociatividad, conmutatividad, elemento neutro, inverso, distributividad, etc.). - **Ejemplos:** $\mathbb{R}^n$, $P_n$ (polinomios de grado $\le n$), $M_{m \times n}$ (matrices $m \times n$). - **Subespacio Vectorial:** Un subconjunto $W$ de un espacio vectorial $V$ que también es un espacio vectorial bajo las mismas operaciones de $V$. Para ser un subespacio, $W$ debe: 1. Contener el vector cero de $V$. 2. Ser cerrado bajo la suma de vectores. 3. Ser cerrado bajo la multiplicación por escalar. - **Combinación Lineal:** Un vector $\vec{w}$ es una combinación lineal de $\vec{v}_1, ..., \vec{v}_k$ si $\vec{w} = c_1\vec{v}_1 + ... + c_k\vec{v}_k$. - **Conjunto Generador (Span):** El conjunto de todas las combinaciones lineales de un conjunto de vectores $\{\vec{v}_1, ..., \vec{v}_k\}$ es el espacio generado por esos vectores, denotado como $Gen\{\vec{v}_1, ..., \vec{v}_k\}$. - **Independencia Lineal:** Un conjunto de vectores $\{\vec{v}_1, ..., \vec{v}_k\}$ es linealmente independiente si la única solución a $c_1\vec{v}_1 + ... + c_k\vec{v}_k = \vec{0}$ es $c_1=c_2=...=c_k=0$. - **Base:** Un conjunto de vectores que es linealmente independiente y genera el espacio vectorial. - **Dimensión:** El número de vectores en cualquier base de un espacio vectorial. - **Rango de una Matriz:** La dimensión del espacio de columnas (o espacio de filas) de una matriz. Es el número de pivotes en su forma escalonada. - **Nulidad de una Matriz:** La dimensión del espacio nulo de una matriz (número de variables libres). - **Teorema del Rango-Nulidad:** Para una matriz $A$ de $m \times n$, $Rango(A) + Nulidad(A) = n$. ### Transformaciones Lineales - **Definición:** Una función $T: V \to W$ entre dos espacios vectoriales $V$ y $W$ es una transformación lineal si para todo $\vec{u}, \vec{v}$ en $V$ y todo escalar $c$: 1. $T(\vec{u} + \vec{v}) = T(\vec{u}) + T(\vec{v})$ (Aditividad) 2. $T(c\vec{u}) = cT(\vec{u})$ (Homogeneidad) - **Matriz Estándar de una Transformación Lineal:** Si $T: \mathbb{R}^n \to \mathbb{R}^m$ es una transformación lineal, existe una única matriz $A$ de $m \times n$ tal que $T(\vec{x}) = A\vec{x}$. Las columnas de $A$ son las imágenes de los vectores de la base canónica: $A = [T(\vec{e}_1) \ T(\vec{e}_2) \ \dots \ T(\vec{e}_n)]$. - **Núcleo (Kernel):** $Ker(T) = \{\vec{v} \in V \mid T(\vec{v}) = \vec{0}\}$. Es un subespacio de $V$. - **Imagen (Range):** $Im(T) = \{T(\vec{v}) \mid \vec{v} \in V\}$. Es un subespacio de $W$. - **Para $T(\vec{x}) = A\vec{x}$:** - $Ker(T)$ es el espacio nulo de $A$. - $Im(T)$ es el espacio de columnas de $A$. - **Inyectiva (Uno a Uno):** $T$ es inyectiva si $Ker(T) = \{\vec{0}\}$. Implica que las columnas de $A$ son linealmente independientes. - **Sobreyectiva (Sobre):** $T$ es sobreyectiva si $Im(T) = W$. Implica que las columnas de $A$ generan $W$.