Hibbeler Mechanics Cheatsheet
Cheatsheet Content
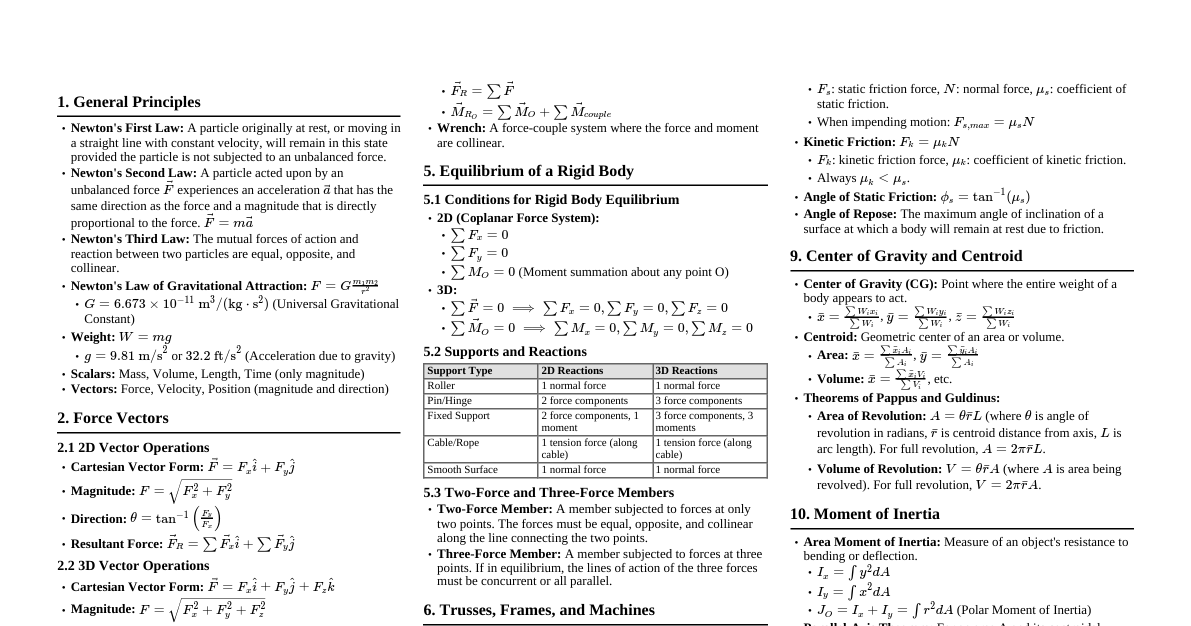
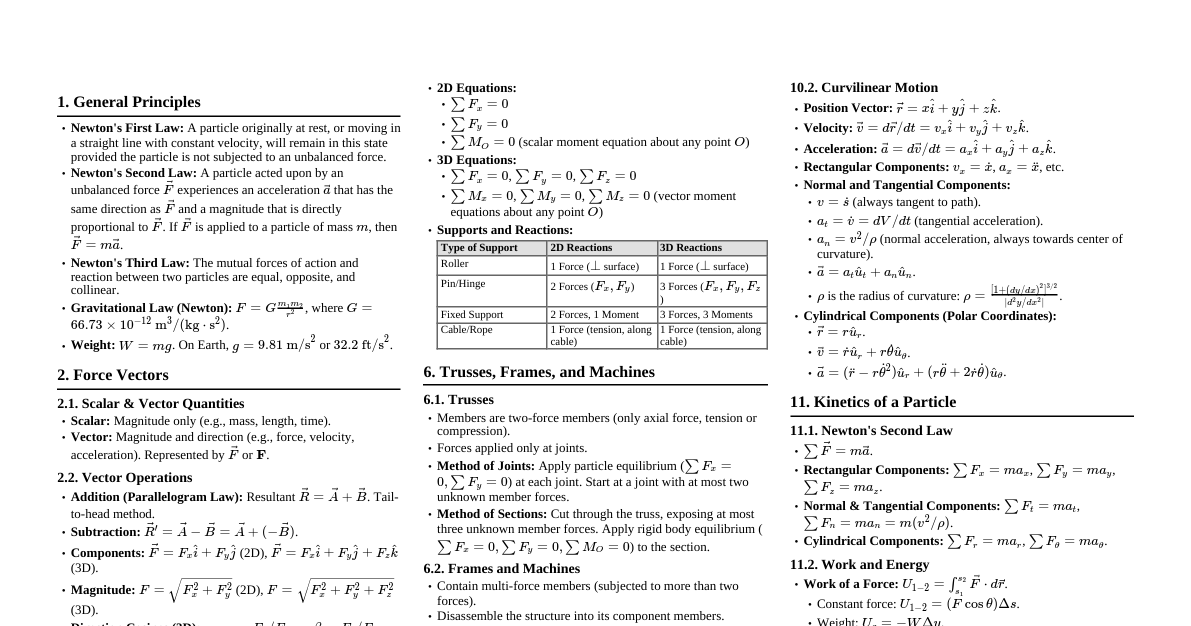
### Vectors and Forces - **Scalar:** Quantity with magnitude (e.g., mass, time, length). - **Vector:** Quantity with magnitude and direction (e.g., force, velocity, acceleration). - **Vector Notation:** $\vec{A}$ or $\mathbf{A}$. Magnitude: $A = |\vec{A}|$. - **Unit Vector:** $\vec{u}_A = \frac{\vec{A}}{|\vec{A}|}$. - **Rectangular Components:** $\vec{A} = A_x\hat{i} + A_y\hat{j} + A_z\hat{k}$. - Magnitude: $A = \sqrt{A_x^2 + A_y^2 + A_z^2}$. - Direction Cosines: $\cos\alpha = \frac{A_x}{A}$, $\cos\beta = \frac{A_y}{A}$, $\cos\gamma = \frac{A_z}{A}$. - $\cos^2\alpha + \cos^2\beta + \cos^2\gamma = 1$. - **Dot Product:** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z$. - Used to find angle between vectors or projection of one vector onto another. - Projection of $\vec{A}$ onto $\vec{B}$: $\text{Proj}_{\vec{B}}\vec{A} = (\vec{A} \cdot \vec{u}_{\vec{B}})\vec{u}_{\vec{B}}$. - **Cross Product:** $\vec{C} = \vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} - (A_x B_z - A_z B_x)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$. - Magnitude: $|\vec{C}| = |\vec{A}||\vec{B}|\sin\theta$. - Direction: Right-hand rule. Perpendicular to both $\vec{A}$ and $\vec{B}$. - Used to calculate moments. #### Force System Resultants - **Concurrent Forces:** All forces pass through a single point. - Resultant: $\vec{F}_R = \sum \vec{F}$. - **Coplanar Forces:** All forces lie in a single plane. - Resolve into $x$ and $y$ components. - $F_{Rx} = \sum F_x$, $F_{Ry} = \sum F_y$. - $F_R = \sqrt{F_{Rx}^2 + F_{Ry}^2}$, $\theta = \arctan\left(\frac{F_{Ry}}{F_{Rx}}\right)$. - **Moment of a Force (Scalar):** $M_O = Fd$, where $d$ is the perpendicular distance from point $O$ to the line of action of $F$. - Sign convention: Counter-clockwise (+), Clockwise (-). - **Moment of a Force (Vector):** $\vec{M}_O = \vec{r} \times \vec{F}$. - $\vec{r}$ is position vector from $O$ to any point on the line of action of $\vec{F}$. - **Varignon's Theorem:** The moment of a resultant force about a point is equal to the sum of the moments of its components about the same point. - **Couple:** Two parallel forces, equal in magnitude, opposite in direction, separated by a perpendicular distance $d$. - Couple Moment: $M = Fd$. It is a free vector. - **Resultant of a Force System:** - $\vec{F}_R = \sum \vec{F}$. - $\vec{M}_{R_O} = \sum \vec{M}_O + \sum \vec{M}_{\text{couples}}$. - The resultant force $\vec{F}_R$ can be placed at a distance $d = M_{R_O} / F_R$ from $O$ to produce the same moment. ### Equilibrium of a Particle - **Definition:** A particle is in equilibrium if the resultant of all forces acting on it is zero. - **Newton's First Law:** $\sum \vec{F} = 0$. - **2D Equilibrium:** $\sum F_x = 0$, $\sum F_y = 0$. - **3D Equilibrium:** $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$. - **Free-Body Diagram (FBD):** Essential for solving equilibrium problems. 1. Isolate the particle. 2. Show all external forces acting on the particle (known and unknown). 3. Label magnitudes and directions. - **Spring Force:** $F_s = ks$, where $k$ is the spring stiffness and $s$ is the deformation (stretch or compression). ### Equilibrium of a Rigid Body - **Definition:** A rigid body is in equilibrium if it is not accelerating (translating or rotating). - **Equations of Equilibrium:** - $\sum \vec{F} = 0 \implies \sum F_x = 0, \sum F_y = 0, \sum F_z = 0$ (Translational) - $\sum \vec{M}_O = 0 \implies \sum M_x = 0, \sum M_y = 0, \sum M_z = 0$ (Rotational) - **2D Equilibrium (Coplanar Force Systems):** - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum M_O = 0$ (where $O$ is any point in the plane) - Alternative sets of equations: 1. $\sum F_x = 0$, $\sum M_A = 0$, $\sum M_B = 0$ (A, B not on perp to x-axis) 2. $\sum M_A = 0$, $\sum M_B = 0$, $\sum M_C = 0$ (A, B, C not collinear) - **Supports and Reactions:** - **Roller:** Force perpendicular to surface. - **Pin/Hinge:** Two force components (x and y). - **Fixed Support:** Two force components (x and y) and a moment. - **Smooth Surface:** Force normal to surface. - **Cable/Rope:** Tension force along the cable. - **Two-Force Member:** Member subjected to forces at only two points; forces must be equal, opposite, and collinear. - **Three-Force Member:** Member subjected to forces at three points; forces must be concurrent or parallel. - **3D Equilibrium:** - $\sum F_x = 0, \sum F_y = 0, \sum F_z = 0$ - $\sum M_x = 0, \sum M_y = 0, \sum M_z = 0$ - **Constraints and Determinacy:** - **Statically Determinate:** Number of unknowns equals number of equilibrium equations. - **Statically Indeterminate:** More unknowns than equations (requires material properties/deformation). - **Improperly Constrained:** Can satisfy equilibrium, but unstable (e.g., parallel reaction forces). ### Trusses - **Definition:** Structure composed of slender members joined at their ends. Assume pin connections and loads applied only at joints. - **Assumptions:** Members are two-force members (only axial force, tension or compression). - **Method of Joints:** 1. Draw FBD of entire truss to find external reactions. 2. Draw FBD for each joint. 3. Apply particle equilibrium equations ($\sum F_x = 0, \sum F_y = 0$) at each joint. 4. Start at a joint with at most two unknown member forces. 5. Assume members are in tension (pulling away from joint); if result is negative, member is in compression. - **Zero-Force Members:** Identify members with no axial force. - If only two non-collinear members connect at a joint and no external load or reaction acts at that joint, both members are zero-force members. - If three members connect at a joint, two are collinear, and no external load or reaction acts at the joint, the third member (not collinear) is a zero-force member. - **Method of Sections:** 1. Draw FBD of entire truss to find external reactions. 2. Cut the truss through the members whose forces are to be determined (section should not pass through more than 3 members with unknown forces). 3. Draw FBD of one part of the sectioned truss. 4. Apply rigid body equilibrium equations ($\sum F_x = 0, \sum F_y = 0, \sum M_O = 0$). 5. Choose a moment center $O$ that eliminates two of the three unknown forces. ### Frames and Machines - **Frames:** Stationary structures designed to support loads. At least one multi-force member. - **Machines:** Structures containing moving parts, designed to transmit or modify forces. - **Analysis Procedure:** 1. Draw FBD of the entire frame/machine (if useful for external reactions). 2. Disassemble the frame/machine and draw FBD for *each* member. 3. For internal pins/connections between two members: show equal and opposite forces acting on each member. 4. Apply rigid body equilibrium equations ($\sum F_x = 0, \sum F_y = 0, \sum M_O = 0$) to each member. 5. Count unknowns and equations to ensure solvability. ### Center of Gravity and Centroid - **Center of Gravity (CG):** Point where the entire weight of a body can be considered to act. - $\bar{x} = \frac{\sum W_i x_i}{\sum W_i}$, $\bar{y} = \frac{\sum W_i y_i}{\sum W_i}$, $\bar{z} = \frac{\sum W_i z_i}{\sum W_i}$. - **Centroid:** Geometric center of an area or volume. If uniform density, CG = Centroid. - **Area:** $\bar{x} = \frac{\int x dA}{\int dA}$, $\bar{y} = \frac{\int y dA}{\int dA}$. - For composite areas: $\bar{x} = \frac{\sum \bar{x}_i A_i}{\sum A_i}$, $\bar{y} = \frac{\sum \bar{y}_i A_i}{\sum A_i}$. - **First Moment of Area:** $Q_x = \int y dA = \bar{y}A$, $Q_y = \int x dA = \bar{x}A$. - **Theorems of Pappus-Guldinus:** 1. **Surface Area of Revolution:** $A = \theta \bar{r} L$. ($\theta$ in radians) - $L$: length of arc, $\bar{r}$: perpendicular distance from centroid of arc to axis of revolution. 2. **Volume of Revolution:** $V = \theta \bar{r} A$. ($\theta$ in radians) - $A$: area, $\bar{r}$: perpendicular distance from centroid of area to axis of revolution. ### Moment of Inertia - **Definition:** Measure of a body's resistance to angular acceleration (second moment of area). - **Area Moment of Inertia:** - $I_x = \int y^2 dA$ - $I_y = \int x^2 dA$ - **Polar Moment of Inertia:** $J_O = \int r^2 dA = I_x + I_y$. - **Parallel-Axis Theorem:** $I = I_c + Ad^2$. - $I_c$: moment of inertia about the centroidal axis. - $A$: area. - $d$: perpendicular distance between the centroidal axis and the parallel axis. - **Radius of Gyration:** $k = \sqrt{\frac{I}{A}}$. - $I_x = k_x^2 A$, $I_y = k_y^2 A$, $J_O = k_O^2 A$. - **For Composite Areas:** Sum the moments of inertia of individual parts about the desired axis, using the parallel-axis theorem for each part if necessary. ### Friction - **Dry Friction (Coulomb Friction):** Occurs between two non-lubricated surfaces. - **Static Friction:** $F_s \le \mu_s N$. - $\mu_s$: coefficient of static friction. - $N$: normal force. - $F_s$ is the force required to prevent motion. Maximum static friction occurs just before motion begins: $F_{s,max} = \mu_s N$. - **Kinetic Friction:** $F_k = \mu_k N$. - $\mu_k$: coefficient of kinetic friction ($\mu_k ### Virtual Work - **Principle of Virtual Work:** If a body is in equilibrium, the total virtual work done by all external forces acting on the body is zero for any virtual displacement consistent with the constraints. - $\delta U = \sum F_i \delta s_i + \sum M_j \delta \theta_j = 0$. - $\delta s_i$: virtual displacement of force $F_i$. - $\delta \theta_j$: virtual rotation of moment $M_j$. - **Virtual Displacement:** An imaginary, infinitesimal displacement of a system of particles consistent with the system's constraints. - **Applications:** Used to determine equilibrium positions or unknown forces/moments without dismembering structures or dealing with internal forces. - **Conservative Forces:** Forces for which the work done is independent of the path taken (e.g., gravity, spring force). - $V = V_g + V_e$. - $V_g = Wy$ (gravitational potential energy). - $V_e = \frac{1}{2}ks^2$ (elastic potential energy). - **Potential Energy Criterion for Equilibrium:** - If a system is in equilibrium, its potential energy $V$ is a minimum, maximum, or inflection point. - $\frac{dV}{ds} = 0$. - **Stable Equilibrium:** $\frac{d^2V}{ds^2} > 0$ (minimum potential energy). - **Unstable Equilibrium:** $\frac{d^2V}{ds^2}