Flots & Systèmes Différentiels
Cheatsheet Content
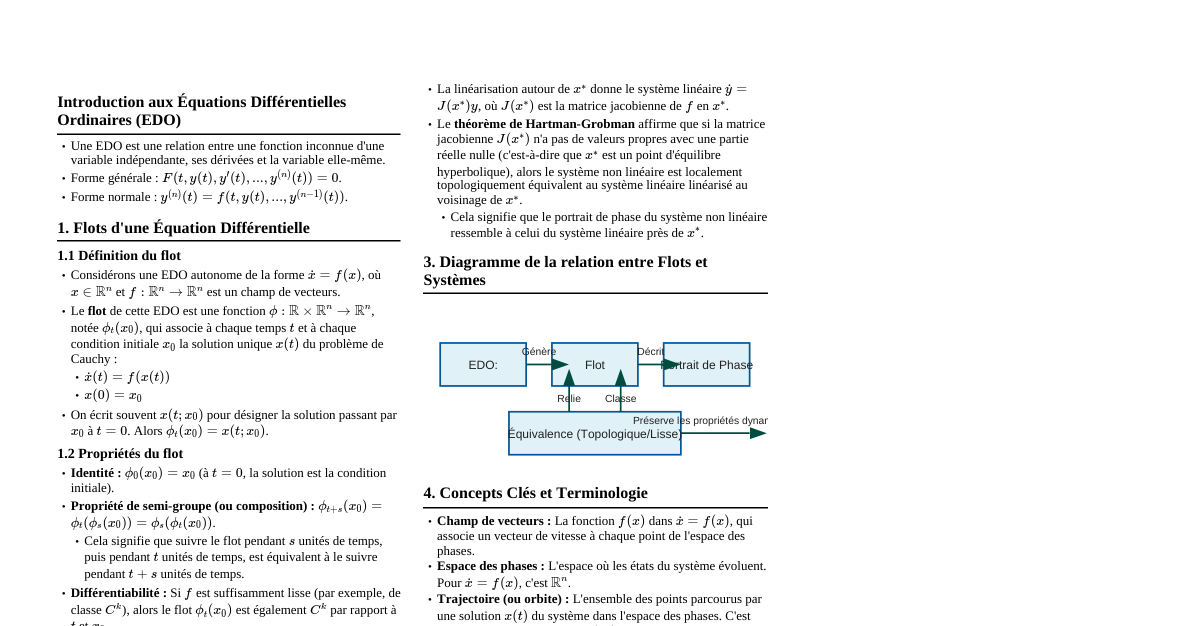
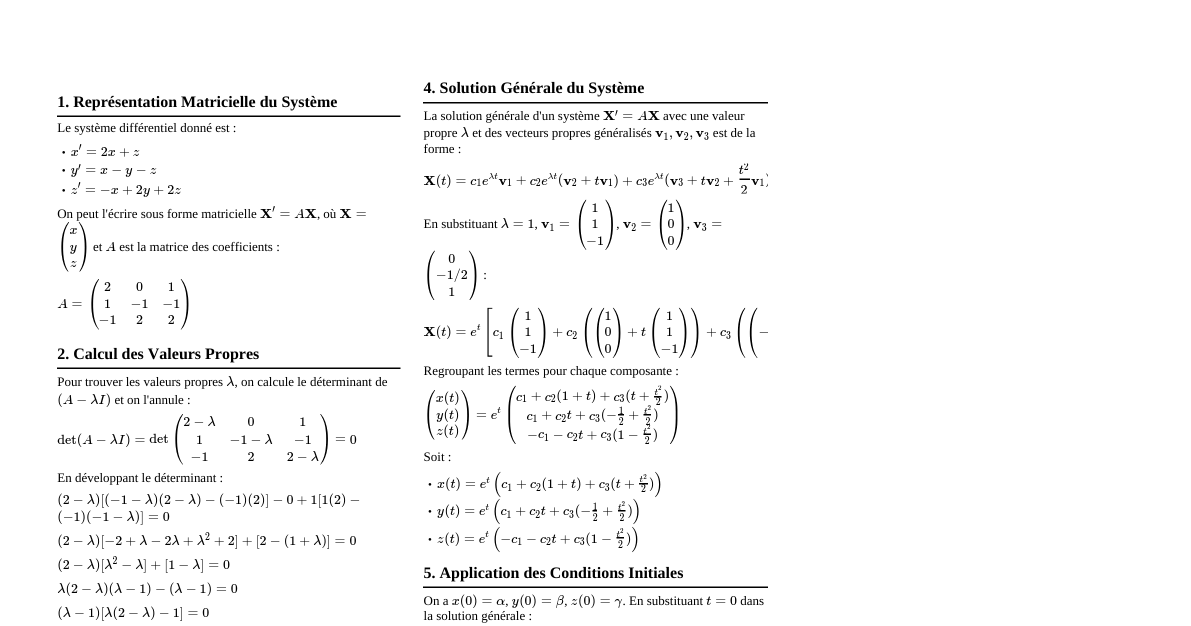
1. Concepts Fondamentaux des Équations Différentielles Définition: Équation impliquant une fonction et ses dérivées. Forme générale: $F(t, y(t), y'(t), ..., y^{(n)}(t)) = 0$. Équation différentielle ordinaire (EDO): Une seule variable indépendante. Ordre: Ordre de la dérivée la plus élevée. Linéaire: $a_n(t)y^{(n)} + ... + a_1(t)y' + a_0(t)y = f(t)$. Autonome: La variable indépendante $t$ n'apparaît pas explicitement: $y' = f(y)$. 2. Systèmes d'Équations Différentielles Forme générale: $\vec{x}'(t) = \vec{f}(t, \vec{x}(t))$, où $\vec{x} \in \mathbb{R}^n$. Cas autonome: $\vec{x}' = \vec{f}(\vec{x})$. Transformation: Une EDO d'ordre $n$ peut être transformée en un système d'EDO de premier ordre. Ex: $y'' + p(t)y' + q(t)y = g(t)$ devient $x_1 = y$ $x_2 = y'$ $\begin{pmatrix} x_1' \\ x_2' \end{pmatrix} = \begin{pmatrix} x_2 \\ -q(t)x_1 - p(t)x_2 + g(t) \end{pmatrix}$ 3. Théorèmes d'Existence et d'Unicité Théorème de Picard-Lindelöf (EDO scalaire): Pour $y' = f(t, y)$ avec CI $y(t_0) = y_0$. Si $f$ et $\frac{\partial f}{\partial y}$ sont continues dans un rectangle $R$ contenant $(t_0, y_0)$, alors il existe une solution unique sur un intervalle $(t_0 - \delta, t_0 + \delta)$. Théorème de Picard-Lindelöf (Systèmes): Pour $\vec{x}' = \vec{f}(t, \vec{x})$ avec CI $\vec{x}(t_0) = \vec{x}_0$. Si $\vec{f}$ et $\frac{\partial \vec{f}}{\partial \vec{x}}$ (matrice Jacobienne) sont continues, alors la solution unique existe localement. Prolongement maximal: Une solution peut être prolongée jusqu'à ce qu'elle quitte le domaine de définition ou devienne non bornée. 4. Flots des Systèmes Autonomes Définition du flot: Pour un système autonome $\vec{x}' = \vec{f}(\vec{x})$, le flot est une fonction $\Phi: \mathbb{R} \times U \to U$ (où $U$ est un ouvert de $\mathbb{R}^n$). $\Phi(t, \vec{x}_0)$ est la solution du système avec condition initiale $\vec{x}(0) = \vec{x}_0$, évaluée au temps $t$. On note souvent $\phi_t(\vec{x}_0) = \Phi(t, \vec{x}_0)$. Propriétés du flot: $\phi_0(\vec{x}_0) = \vec{x}_0$ (Identité) $\phi_{t+s}(\vec{x}_0) = \phi_t(\phi_s(\vec{x}_0))$ (Propriété de groupe/semi-groupe) $\frac{d}{dt}\phi_t(\vec{x}_0) = \vec{f}(\phi_t(\vec{x}_0))$ (L'équation différentielle elle-même) Le flot est différentiable par rapport à $t$ et $\vec{x}_0$. Champ de vecteurs: $\vec{f}(\vec{x})$ définit la direction et la vitesse du mouvement en chaque point $\vec{x}$. Les trajectoires du flot sont tangentes au champ de vecteurs. 5. Points d'Équilibre et Linéarisation Point d'équilibre (ou point fixe): Un point $\vec{x}^*$ tel que $\vec{f}(\vec{x}^*) = \vec{0}$. Si $\vec{x}(0) = \vec{x}^*$, alors $\vec{x}(t) = \vec{x}^*$. Linéarisation autour d'un point d'équilibre: Soit $\vec{x}' = \vec{f}(\vec{x})$. Soit $\vec{x}^*$ un point d'équilibre. Posons $\vec{y} = \vec{x} - \vec{x}^*$. Alors $\vec{y}' = \vec{x}' = \vec{f}(\vec{x}^* + \vec{y})$. Par développement de Taylor: $\vec{f}(\vec{x}^* + \vec{y}) \approx \vec{f}(\vec{x}^*) + D\vec{f}(\vec{x}^*)\vec{y} = J(\vec{x}^*)\vec{y}$. Système linéarisé: $\vec{y}' = J(\vec{x}^*)\vec{y}$, où $J(\vec{x}^*)$ est la matrice jacobienne de $\vec{f}$ évaluée en $\vec{x}^*$. Stabilité des points d'équilibre (systèmes linéaires $\vec{y}' = A\vec{y}$): Dépend des valeurs propres de $A$. Stable asymptotiquement: Toutes les valeurs propres $\lambda_i$ ont $\text{Re}(\lambda_i) Stable (Lyapunov): Toutes les valeurs propres $\lambda_i$ ont $\text{Re}(\lambda_i) \le 0$, et pour celles avec $\text{Re}(\lambda_i) = 0$, les blocs de Jordan associés sont de taille 1 (matrice diagonalisable). Instable: Au moins une valeur propre $\lambda_i$ a $\text{Re}(\lambda_i) > 0$, ou $\text{Re}(\lambda_i) = 0$ avec un bloc de Jordan de taille $>1$. Nœud stable/instable: Valeurs propres réelles de même signe. Col (point selle): Valeurs propres réelles de signes opposés. Foyer stable/instable: Valeurs propres complexes conjuguées avec $\text{Re}(\lambda) \ne 0$. Centre: Valeurs propres imaginaires pures ($\text{Re}(\lambda) = 0$, $\text{Im}(\lambda) \ne 0$). Théorème de Hartman-Grobman: Si $J(\vec{x}^*)$ n'a pas de valeurs propres avec une partie réelle nulle (point d'équilibre hyperbolique), alors le flot du système non linéaire est topologiquement équivalent au flot du système linéarisé près de $\vec{x}^*$. 6. Variétés Stables et Instables Variété stable $W^s(\vec{x}^*)$: Ensemble des points $\vec{x}_0$ tels que $\phi_t(\vec{x}_0) \to \vec{x}^*$ quand $t \to \infty$. Variété instable $W^u(\vec{x}^*)$: Ensemble des points $\vec{x}_0$ tels que $\phi_t(\vec{x}_0) \to \vec{x}^*$ quand $t \to -\infty$. Elles sont tangentes aux sous-espaces propres stables et instables du système linéarisé en $\vec{x}^*$. Théorème des variétés stables: Pour un point d'équilibre hyperbolique, $W^s(\vec{x}^*)$ et $W^u(\vec{x}^*)$ sont des sous-variétés lisses. 7. Fonctions de Lyapunov Définition: Soit $\vec{x}^*$ un point d'équilibre pour $\vec{x}' = \vec{f}(\vec{x})$. Une fonction scalaire $V(\vec{x})$ est une fonction de Lyapunov si: $V(\vec{x}^*) = 0$ et $V(\vec{x}) > 0$ pour $\vec{x} \ne \vec{x}^*$. $\dot{V}(\vec{x}) = \nabla V(\vec{x}) \cdot \vec{f}(\vec{x}) \le 0$ dans un voisinage de $\vec{x}^*$. Théorème de Stabilité de Lyapunov: Si $\dot{V}(\vec{x}) \le 0$, alors $\vec{x}^*$ est stable. Si $\dot{V}(\vec{x}) Théorème d'Instabilité de Chetaev: Conditions pour l'instabilité en utilisant une fonction $V(\vec{x})$ dont la dérivée est positive. 8. Trajectoires Périodiques et Cycles Limites Trajectoire périodique: Une solution $\vec{x}(t)$ telle qu'il existe un $T > 0$ (période) avec $\vec{x}(t+T) = \vec{x}(t)$ pour tout $t$. Cycle limite: Une trajectoire périodique isolée (aucune autre trajectoire périodique ne se trouve à proximité). Les cycles limites peuvent être stables (attractifs) ou instables (répulsifs). Théorème de Poincaré-Bendixson (pour $\mathbb{R}^2$): Si une trajectoire dans un domaine compact sans points d'équilibre finit par rester dans ce domaine, alors elle s'approche d'une trajectoire périodique (un cycle limite) ou d'un ensemble de points d'équilibre et de trajectoires les connectant. Critère de Dulac: Pour $\vec{x}' = \vec{f}(\vec{x})$ dans $\mathbb{R}^2$, si une fonction $B(x,y)$ existe telle que $\nabla \cdot (B\vec{f})$ a un signe constant (ou est identiquement nulle) dans une région simplement connexe, alors il n'y a pas de cycles limites dans cette région. 9. Bifurcations Définition: Changement qualitatif du comportement du système (par exemple, apparition/disparition de points d'équilibre, cycles limites) lorsque un paramètre du système varie. Exemples de bifurcations locales (codimension 1): Bifurcation selle-nœud (fold): Deux points d'équilibre (un stable, un instable) se rencontrent et disparaissent. Bifurcation transcrittique: Deux points d'équilibre échangent leur stabilité. Bifurcation fourche (pitchfork): Un point d'équilibre stable se divise en trois (un stable et deux instables, ou vice versa). Supercritique: Nouvelle stabilité. Sous-critique: Perte de stabilité. Bifurcation de Hopf: Un point d'équilibre perd sa stabilité et un cycle limite émerge (ou disparaît). Supercritique: Cycle limite stable émerge. Sous-critique: Cycle limite instable émerge. 10. Théorie du Chaos (Brève introduction) Définition: Comportement déterministe mais imprévisible et très sensible aux conditions initiales. Attracteur étrange: Un attracteur sur lequel le flot est chaotique. Il a souvent une structure fractale. Exemples célèbres: Système de Lorenz, carte logistique. Propriétés: Sensibilité aux conditions initiales (effet papillon). Densité des orbites périodiques. Mixage topologique.