Hibbeler Mechanics
Cheatsheet Content
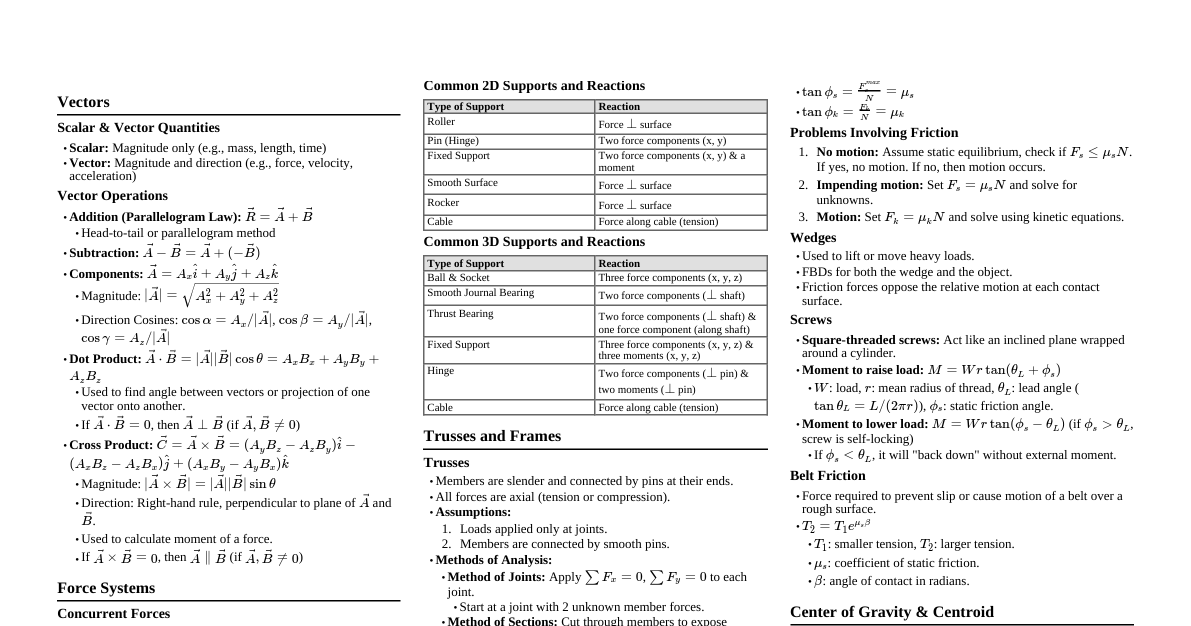
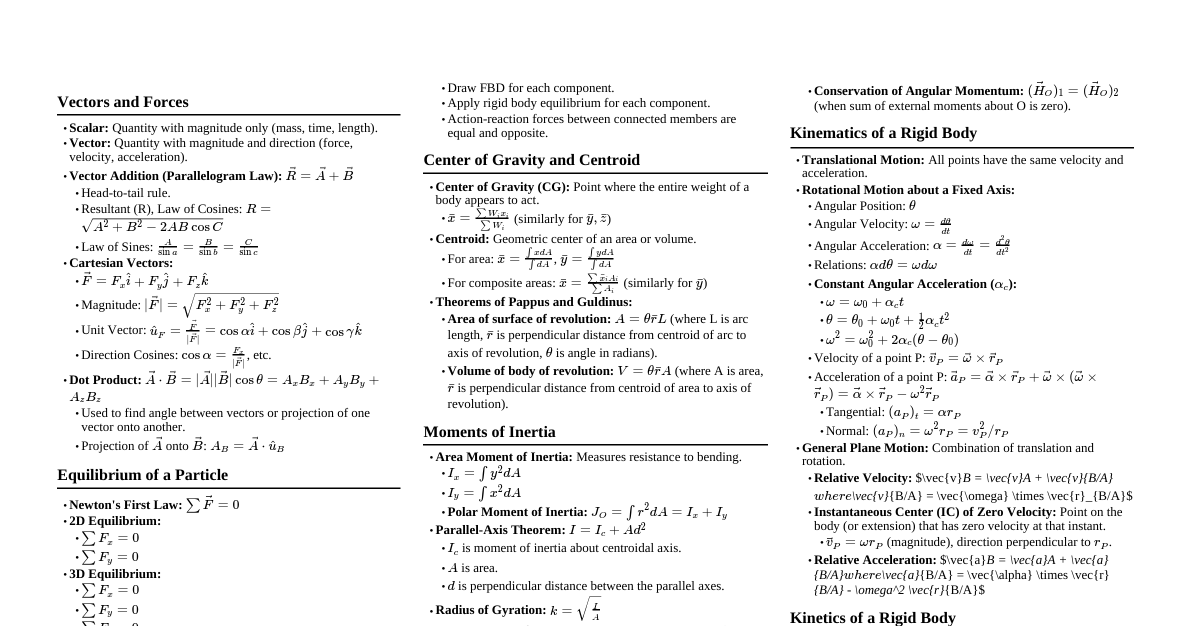
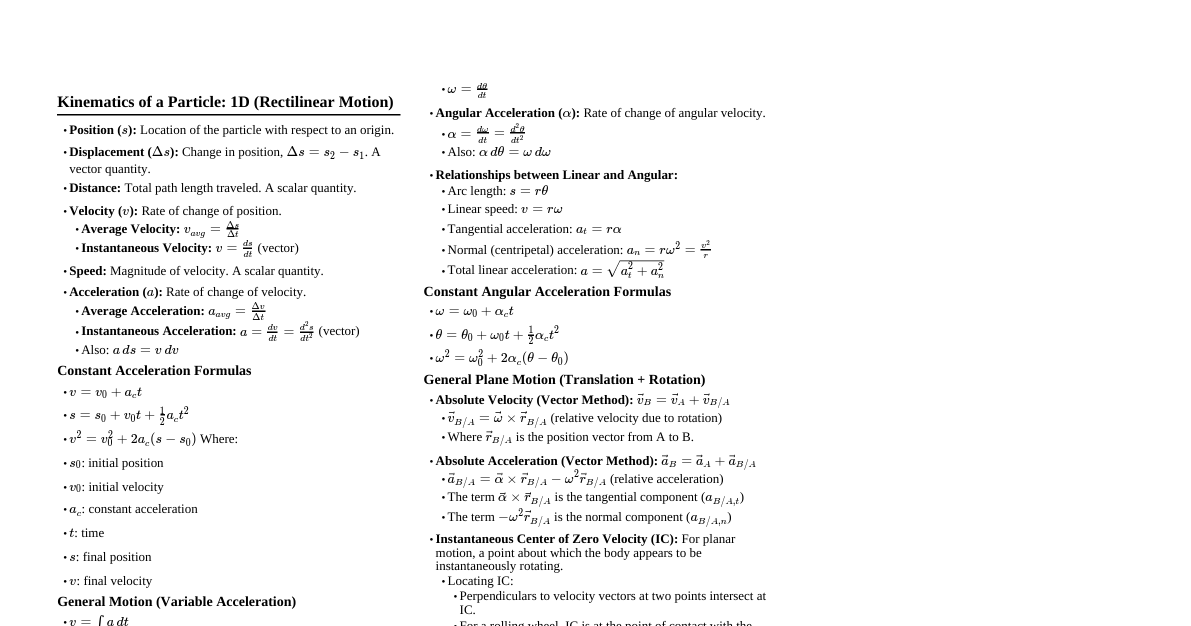
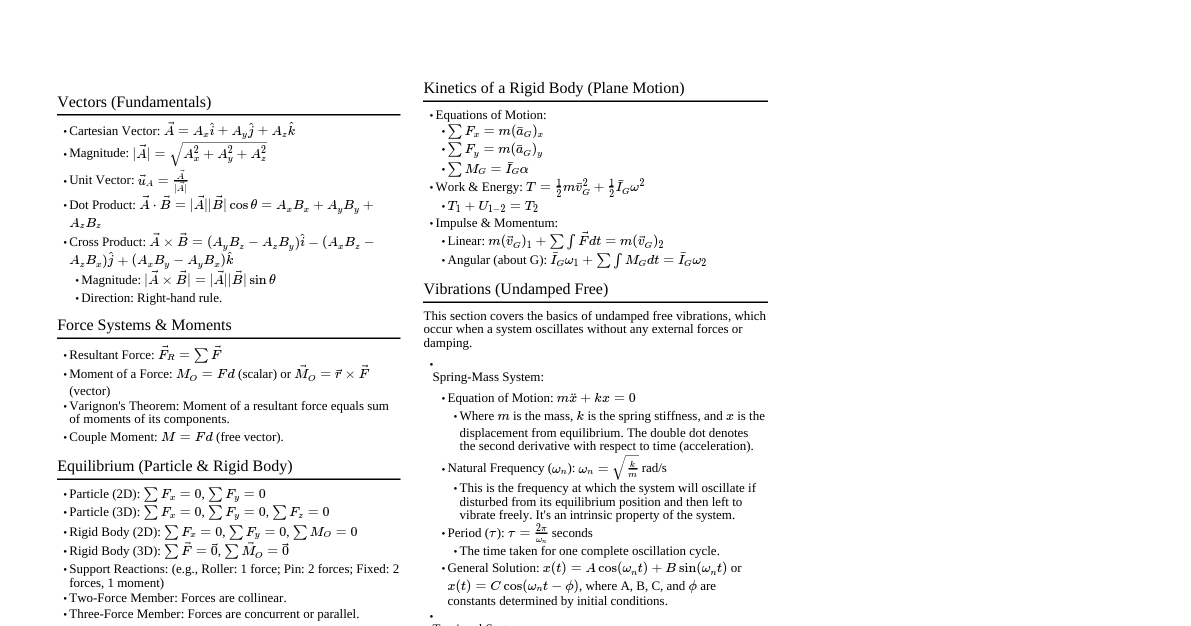
### Units & Conversions - **SI Units:** - Length: meter (m) - Mass: kilogram (kg) - Time: second (s) - Force: Newton (N) = kg·m/s² - **US Customary (FPS):** - Length: foot (ft) - Mass: slug (slug) - Time: second (s) - Force: pound (lb) = slug·ft/s² - **Common Conversions:** - 1 ft = 0.3048 m - 1 lb = 4.448 N - 1 slug = 14.59 kg - 1 kip = 1000 lb ### Force Vectors - **Scalar:** Magnitude only (e.g., mass, length, time) - **Vector:** Magnitude and direction (e.g., force, velocity, acceleration) - **Vector Components:** - 2D: $\vec{F} = F_x \hat{i} + F_y \hat{j}$ - 3D: $\vec{F} = F_x \hat{i} + F_y \hat{j} + F_z \hat{k}$ - **Magnitude:** $|\vec{F}| = \sqrt{F_x^2 + F_y^2 + F_z^2}$ - **Direction Cosines:** $\cos\alpha = F_x/|\vec{F}|$, $\cos\beta = F_y/|\vec{F}|$, $\cos\gamma = F_z/|\vec{F}|$ - $\cos^2\alpha + \cos^2\beta + \cos^2\gamma = 1$ - **Unit Vector:** $\vec{u}_F = \vec{F}/|\vec{F}| = \cos\alpha \hat{i} + \cos\beta \hat{j} + \cos\gamma \hat{k}$ - **Dot Product:** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z$ - Used to find angle between vectors or project one vector onto another. - **Cross Product:** $\vec{C} = \vec{A} \times \vec{B}$ - Magnitude: $|\vec{C}| = |\vec{A}||\vec{B}|\sin\theta$ - Direction: Right-hand rule - Components: $\vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} + (A_z B_x - A_x B_z)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$ - Used to find moment of a force. ### Equilibrium of a Particle (2D & 3D) - **Free-Body Diagram (FBD):** Essential first step. Isolate the particle and show all external forces acting on it. - **Conditions for Equilibrium:** Sum of all forces must be zero. - 2D: $\sum F_x = 0$, $\sum F_y = 0$ - 3D: $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - **Spring Force:** $F_s = k s$ - $k$: spring stiffness (N/m or lb/ft) - $s$: deformation (stretched or compressed length - unstretched length) ### Moment of a Force & Couples - **Moment about a Point (Scalar - 2D):** $M_O = F d$ - $d$: perpendicular distance from the point O to the line of action of the force F. - Sign convention: Counter-clockwise (CCW) is positive. - **Moment about a Point (Vector - 3D):** $\vec{M}_O = \vec{r} \times \vec{F}$ - $\vec{r}$: position vector from point O to any point on the line of action of $\vec{F}$. - **Moment about an Axis (Scalar - 3D):** $M_{axis} = \vec{u}_{axis} \cdot (\vec{r} \times \vec{F})$ - $\vec{u}_{axis}$: unit vector along the axis. - **Varignon's Theorem:** The moment of a force about a point is equal to the sum of the moments of its components about the same point. - $M_O = (\vec{r} \times \vec{F}_1) + (\vec{r} \times \vec{F}_2) + ... = \vec{r} \times (\vec{F}_1 + \vec{F}_2 + ...)$ - **Couple:** Two parallel forces with the same magnitude but opposite direction, separated by a perpendicular distance $d$. - **Resultant Couple Moment:** $M = F d$ (magnitude) - The couple moment is a free vector (acts anywhere). ### Equilibrium of a Rigid Body (2D & 3D) - **Free-Body Diagram (FBD):** Show all external forces and moments. Include reaction forces at supports. - **Support Reactions:** - **Pin/Hinge:** Two force components (e.g., $R_x, R_y$) - **Roller:** One force component (perpendicular to surface) - **Fixed Support (Cantilever):** Two force components ($R_x, R_y$) and one moment ($M_z$) in 2D. Three force components and three moment components in 3D. - **Cable/Rope:** One tension force (along the cable) - **Equations of Equilibrium:** - **2D:** - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum M_O = 0$ (moment about any point O) - **3D:** - $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ (moments about x, y, z axes) - **Two-Force Member:** A member subjected to only two forces. These forces must be equal, opposite, and collinear. - **Three-Force Member:** A member subjected to three forces. If in equilibrium, the lines of action of the three forces must be concurrent or parallel. ### Trusses - **Assumptions:** 1. Members are connected by frictionless pins. 2. Loads are applied only at the joints. 3. Member weights are negligible. - **Result:** Each member acts as a two-force member (either in tension or compression). - **Methods of Analysis:** - **Method of Joints:** 1. Draw FBD of the entire truss to find support reactions. 2. Draw FBD for each joint. 3. Apply $\sum F_x = 0$ and $\sum F_y = 0$ at each joint. 4. Start at a joint with at most two unknown member forces. - **Method of Sections:** 1. Draw FBD of the entire truss to find support reactions. 2. Cut the truss through a section that passes through no more than three members where forces are unknown. 3. Apply $\sum F_x = 0$, $\sum F_y = 0$, and $\sum M_O = 0$ to the section. 4. Choose moment centers strategically to eliminate unknowns. - **Zero-Force Members:** - If only two non-collinear members connect at a joint and no external load or reaction is applied to the joint, then both members are zero-force members. - If three members connect at a joint, two of which are collinear, and no external load or reaction is applied to the joint, then the third member is a zero-force member. ### Frames & Machines - **Frames:** Structures designed to support loads, usually stationary and fully constrained. Contain at least one multi-force member. - **Machines:** Structures designed to transmit and modify forces, always contain moving parts. - **Analysis Procedure:** 1. Draw FBD of the entire structure to find external reactions (if possible). 2. Disassemble the frame/machine into its component parts. 3. Draw FBD for each component, showing all forces (internal and external) acting on it. 4. Apply Newton's Third Law (action-reaction pairs) for internal forces at pin connections between components. 5. Apply equilibrium equations ($\sum F_x=0, \sum F_y=0, \sum M_O=0$) to each component. ### Center of Gravity & Centroid - **Center of Gravity (CG):** Point where the entire weight of an object appears to act. - $x_{CG} = \frac{\sum W_i x_i}{\sum W_i}$, $y_{CG} = \frac{\sum W_i y_i}{\sum W_i}$, $z_{CG} = \frac{\sum W_i z_i}{\sum W_i}$ - **Centroid:** Geometric center of an area, volume, or line. - **Area:** $x_C = \frac{\int x dA}{\int dA}$, $y_C = \frac{\int y dA}{\int dA}$ - **Composite Areas:** - $x_C = \frac{\sum A_i x_{Ci}}{\sum A_i}$ - $y_C = \frac{\sum A_i y_{Ci}}{\sum A_i}$ - **Theorems of Pappus and Guldinus:** - **Area of surface of revolution:** $A = \theta \bar{r} L$ (line revolved) - **Volume of body of revolution:** $V = \theta \bar{r} A$ (area revolved) - $\theta$: angle of revolution in radians ($2\pi$ for full revolution) - $\bar{r}$: perpendicular distance from centroid of line/area to axis of revolution. ### Friction - **Static Friction ($F_s$):** Opposes impending motion. - $0 \le F_s \le \mu_s N$ - $\mu_s$: coefficient of static friction - $N$: normal force - **Kinetic Friction ($F_k$):** Opposes actual motion. - $F_k = \mu_k N$ - $\mu_k$: coefficient of kinetic friction ($\mu_k ### Moment of Inertia - **Moment of Inertia of an Area:** Measures resistance to rotation (bending). - $I_x = \int y^2 dA$ - $I_y = \int x^2 dA$ - $J_O = I_x + I_y = \int r^2 dA$ (Polar Moment of Inertia) - **Parallel-Axis Theorem:** $I_{x'} = I_x + A d_y^2$, $I_{y'} = I_y + A d_x^2$ - $I_x, I_y$: moments of inertia about centroidal axes. - $I_{x'}, I_{y'}$: moments of inertia about parallel axes $x', y'$. - $d_x, d_y$: perpendicular distances between the axes. - $A$: area. - **Radius of Gyration:** $k = \sqrt{I/A}$ - $I = k^2 A$ - **Composite Areas:** Sum the moments of inertia of individual parts about the desired axis using the parallel-axis theorem. ### Kinematics of a Particle - **Rectilinear Motion (Constant Acceleration):** - $v = v_0 + a_c t$ - $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$ - $v^2 = v_0^2 + 2 a_c (s - s_0)$ - **General Rectilinear Motion:** - $v = ds/dt$ - $a = dv/dt = d^2s/dt^2$ - $a ds = v dv$ - **Curvilinear Motion:** - **Rectangular Components (x, y, z):** - $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ - $\vec{v} = v_x\hat{i} + v_y\hat{j} + v_z\hat{k}$ - $\vec{a} = a_x\hat{i} + a_y\hat{j} + a_z\hat{k}$ - **Normal and Tangential Components (n, t):** - $v = \dot{s}$ - $a_t = \dot{v} = v dv/ds$ (rate of change of speed) - $a_n = v^2/\rho$ (normal acceleration, always towards center of curvature) - $\rho$: radius of curvature - $\vec{a} = a_t \hat{u}_t + a_n \hat{u}_n$ - **Cylindrical Components (r, $\theta$, z):** - $\vec{r} = r\hat{u}_r + z\hat{k}$ - $\vec{v} = \dot{r}\hat{u}_r + r\dot{\theta}\hat{u}_{\theta} + \dot{z}\hat{k}$ - $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\hat{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{u}_{\theta} + \ddot{z}\hat{k}$ ### Kinetics of a Particle - **Newton's Second Law:** $\sum \vec{F} = m \vec{a}$ - **Rectangular:** $\sum F_x = m a_x$, $\sum F_y = m a_y$, $\sum F_z = m a_z$ - **Normal-Tangential:** $\sum F_t = m a_t$, $\sum F_n = m a_n = m v^2/\rho$ - **Cylindrical:** $\sum F_r = m a_r$, $\sum F_{\theta} = m a_{\theta}$, $\sum F_z = m a_z$ - **Equations of Motion:** Apply $\sum \vec{F} = m \vec{a}$ in an appropriate coordinate system. - **Pulleys & Cables:** Tension is constant throughout a continuous cable. Relate accelerations of connected particles. ### Work and Energy - **Work of a Force:** - **Constant Force:** $U = F \cos\theta \cdot s$ - **Variable Force:** $U = \int \vec{F} \cdot d\vec{r}$ - **Spring Force:** $U_s = -\frac{1}{2} k s^2$ (work done by spring) - **Weight:** $U_g = -W \Delta y$ - **Principle of Work and Energy:** $T_1 + \sum U_{1-2} = T_2$ - **Kinetic Energy:** $T = \frac{1}{2} m v^2$ - $\sum U_{1-2}$: sum of work done by all forces (conservative and non-conservative). - **Conservation of Energy (for conservative forces only):** $T_1 + V_1 = T_2 + V_2$ - **Potential Energy:** - Gravitational: $V_g = W y$ - Elastic (Spring): $V_e = \frac{1}{2} k s^2$ ### Impulse and Momentum - **Linear Impulse:** $\vec{I} = \int_{t_1}^{t_2} \vec{F} dt$ - **Linear Momentum:** $\vec{G} = m \vec{v}$ - **Principle of Linear Impulse and Momentum:** $m\vec{v}_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m\vec{v}_2$ - $\sum \int \vec{F} dt$ is the sum of all external impulses. - **Conservation of Linear Momentum (if $\sum \int \vec{F} dt = 0$):** $m_1 \vec{v}_{1,1} + m_2 \vec{v}_{2,1} = m_1 \vec{v}_{1,2} + m_2 \vec{v}_{2,2}$ - Applies when the sum of external impulses is zero (e.g., during impact). - **Impact:** - **Coefficient of Restitution (e):** $e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1}$ - $e=1$: perfectly elastic impact (kinetic energy conserved) - $e=0$: perfectly plastic impact (objects stick together) - **Oblique Impact:** Apply conservation of momentum along the common tangent, and coefficient of restitution along the line of impact. ### Angular Momentum - **Angular Momentum of a Particle about a Point O:** $\vec{H}_O = \vec{r} \times m\vec{v}$ - **Principle of Angular Impulse and Momentum:** $(\vec{H}_O)_1 + \sum \int_{t_1}^{t_2} \vec{M}_O dt = (\vec{H}_O)_2$ - $\sum \int \vec{M}_O dt$ is the sum of all external angular impulses (moments). - **Conservation of Angular Momentum (if $\sum \int \vec{M}_O dt = 0$):** $(\vec{H}_O)_1 = (\vec{H}_O)_2$ - Applies when the sum of external moments about point O is zero. ### Kinematics of a Rigid Body - **Rotation about a Fixed Axis (Constant Angular Acceleration):** - $\omega = \omega_0 + \alpha_c t$ - $\theta = \theta_0 + \omega_0 t + \frac{1}{2} \alpha_c t^2$ - $\omega^2 = \omega_0^2 + 2 \alpha_c (\theta - \theta_0)$ - **General Rotation:** - $\omega = d\theta/dt$ - $\alpha = d\omega/dt = d^2\theta/dt^2$ - $\alpha d\theta = \omega d\omega$ - **Velocity of a Point on a Rotating Body:** $\vec{v} = \vec{\omega} \times \vec{r}$ - **Acceleration of a Point on a Rotating Body:** $\vec{a} = \vec{\alpha} \times \vec{r} + \vec{\omega} \times (\vec{\omega} \times \vec{r})$ - $a_t = \alpha r$ (tangential) - $a_n = \omega^2 r = v^2/r$ (normal) - **Relative Motion Analysis (Translating Axes):** - $\vec{v}_B = \vec{v}_A + \vec{v}_{B/A}$ - $\vec{a}_B = \vec{a}_A + \vec{a}_{B/A}$ - For rigid body: $\vec{v}_{B/A} = \vec{\omega} \times \vec{r}_{B/A}$ - For rigid body: $\vec{a}_{B/A} = \vec{\alpha} \times \vec{r}_{B/A} + \vec{\omega} \times (\vec{\omega} \times \vec{r}_{B/A})$ - **Rolling Without Slipping:** - $v_C = \omega r$ - $a_C = \alpha r$ - Point of contact has zero velocity. ### Kinetics of a Rigid Body - **Equations of Motion (Plane Motion):** - $\sum F_x = m (a_G)_x$ - $\sum F_y = m (a_G)_y$ - $\sum M_G = I_G \alpha$ (moment about center of mass G) - Alternatively, $\sum M_P = \sum (\mathcal{M}_k)_P$ (moment about any point P, where $\sum (\mathcal{M}_k)_P$ includes moments of $m(a_G)_x$, $m(a_G)_y$, and $I_G \alpha$) - **Mass Moment of Inertia:** $I = \int r^2 dm$ - **Parallel-Axis Theorem for Mass Moment of Inertia:** $I = I_G + m d^2$ - **Kinetic Energy (Plane Motion):** $T = \frac{1}{2} m v_G^2 + \frac{1}{2} I_G \omega^2$ - **Work-Energy for a Rigid Body:** $T_1 + \sum U_{1-2} = T_2$ - **Linear Impulse and Momentum for a Rigid Body:** $m(\vec{v}_G)_1 + \sum \int \vec{F} dt = m(\vec{v}_G)_2$ - **Angular Impulse and Momentum for a Rigid Body:** $(H_G)_1 + \sum \int M_G dt = (H_G)_2$ - $(H_G) = I_G \omega$