Hibbeler Mechanics
Shared 3/28/2026•75 views
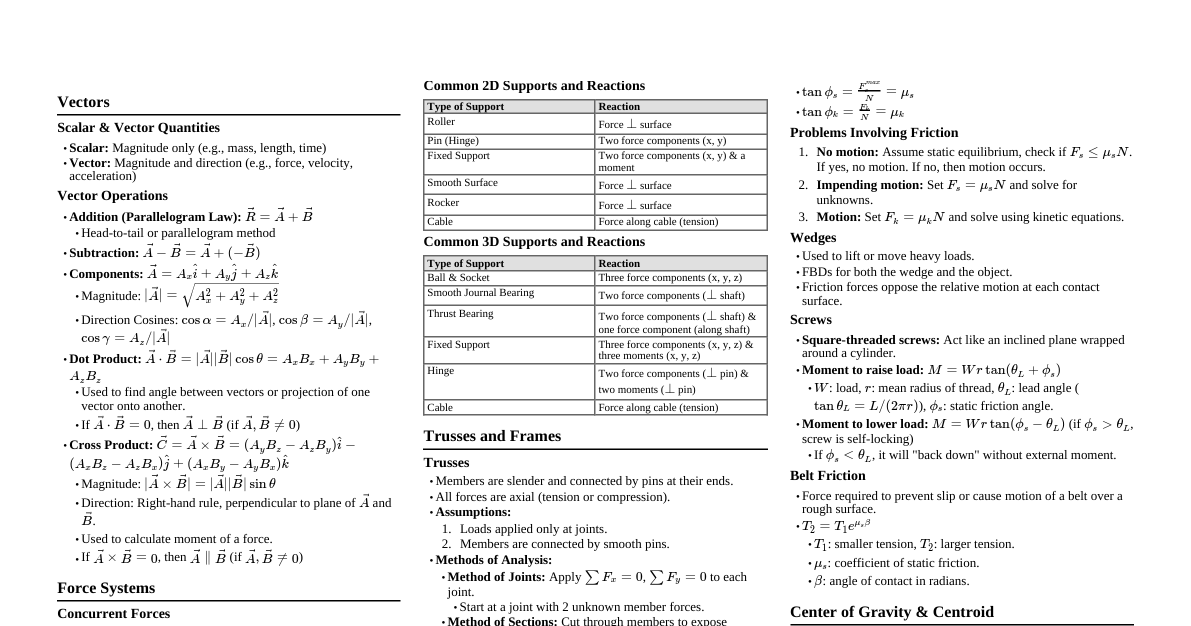
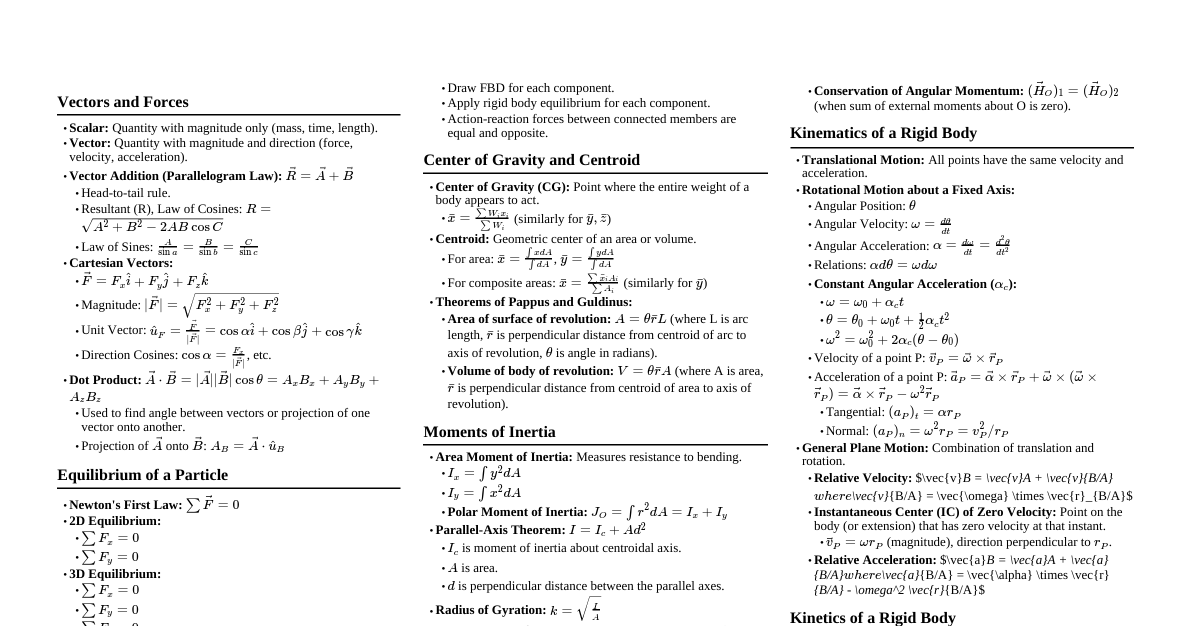
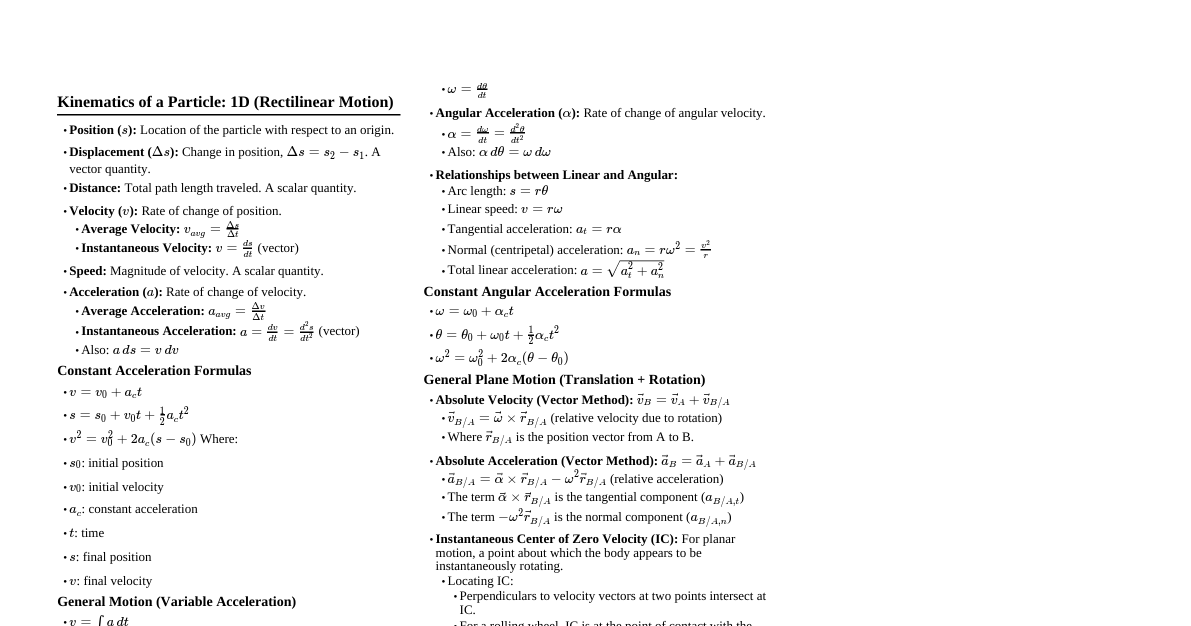
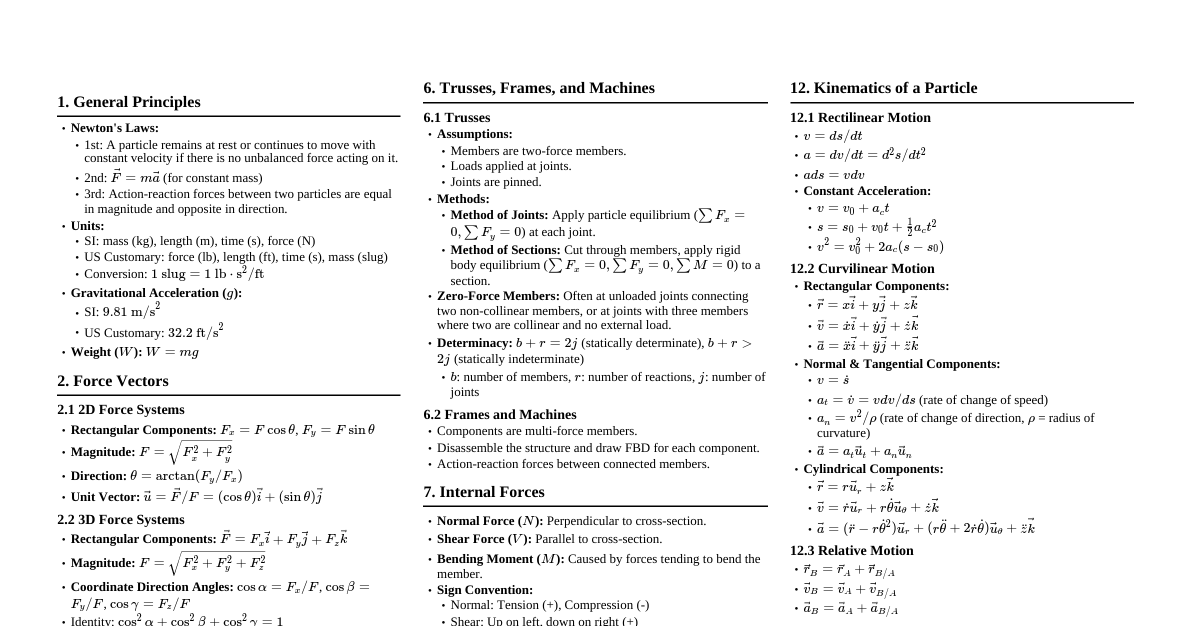
### Fundamental Principles - **Newton's First Law:** A particle originally at rest or moving in a straight line with constant velocity will remain in this state provided the particle is not subjected to an unbalanced force. - **Newton's Second Law:** A particle acted upon by an unbalanced force $\vec{F}$ experiences an acceleration $\vec{a}$ that has the same direction as $\vec{F}$ and a magnitude that is directly proportional to $\vec{F}$. $$\vec{F} = m\vec{a}$$ - **Newton's Third Law:** The mutual forces of action and reaction between two particles are equal, opposite, and collinear. - **Newton's Law of Gravitational Attraction:** $$F = G \frac{m_1 m_2}{r^2}$$ Where $G = 66.73 \times 10^{-12} \text{ m}^3/(\text{kg} \cdot \text{s}^2)$ is the universal constant of gravitation. - **Weight:** $W = mg$ Where $g = 9.81 \text{ m/s}^2$ or $32.2 \text{ ft/s}^2$. ### Units of Measurement - **SI Units:** - Length: meter (m) - Mass: kilogram (kg) - Time: second (s) - Force: Newton (N) = kg $\cdot$ m/s$^2$ - **US Customary Units:** - Length: foot (ft) - Mass: slug = lb $\cdot$ s$^2$/ft - Time: second (s) - Force: pound (lb) | Quantity | SI Units | US Customary Units | |----------|----------|--------------------| | Force | N | lb | | Mass | kg | slug | | Length | m | ft | | Time | s | s | ### Position Vectors - **Representation:** $\vec{r} = x\vec{i} + y\vec{j} + z\vec{k}$ - **Magnitude:** $|\vec{r}| = \sqrt{x^2 + y^2 + z^2}$ - **Unit Vector:** $\vec{u} = \frac{\vec{r}}{|\vec{r}|}$ ### Dot Product - **Definition:** $\vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta$ - **Component Form:** $\vec{A} \cdot \vec{B} = A_x B_x + A_y B_y + A_z B_z$ - **Applications:** - **Angle between two vectors:** $\cos\theta = \frac{\vec{A} \cdot \vec{B}}{|\vec{A}||\vec{B}|}$ - **Component of a vector parallel to a line:** $A_{\parallel} = \vec{A} \cdot \vec{u}$ ### Cross Product - **Definition:** $\vec{C} = \vec{A} \times \vec{B}$ has magnitude $|\vec{C}| = |\vec{A}||\vec{B}|\sin\theta$ and direction perpendicular to the plane containing $\vec{A}$ and $\vec{B}$, given by the right-hand rule. - **Component Form:** $$\vec{A} \times \vec{B} = \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ A_x & A_y & A_z \\ B_x & B_y & B_z \end{vmatrix}$$ $$= (A_y B_z - A_z B_y)\vec{i} - (A_x B_z - A_z B_x)\vec{j} + (A_x B_y - A_y B_x)\vec{k}$$ - **Applications:** - **Moment of a force:** $\vec{M}_O = \vec{r} \times \vec{F}$ ### Force Vectors - **Cartesian Vector Representation:** $\vec{F} = F_x\vec{i} + F_y\vec{j} + F_z\vec{k}$ - **Direction Cosines:** $\cos\alpha = \frac{F_x}{F}$, $\cos\beta = \frac{F_y}{F}$, $\cos\gamma = \frac{F_z}{F}$ Where $\cos^2\alpha + \cos^2\beta + \cos^2\gamma = 1$. - **Force along a Line:** $\vec{F} = F \vec{u} = F \left( \frac{\vec{r}}{|\vec{r}|} \right)$ ### Equilibrium of a Particle - **Condition for Equilibrium:** $\sum \vec{F} = \vec{0}$ - **In Cartesian Components:** $$\sum F_x = 0$$ $$\sum F_y = 0$$ $$\sum F_z = 0$$ - **Free-Body Diagram (FBD):** Essential for visualizing all external forces acting on a particle. #### Types of Connections - **Cables/Ropes:** Always tension, pulling away from the particle. - **Springs:** Force is proportional to deformation $F_s = ks$, where $k$ is spring stiffness. ### Moment of a Force - **Scalar Formulation (2D):** $M_O = Fd$ Where $d$ is the perpendicular distance from the pivot point $O$ to the line of action of the force. - Counter-clockwise is positive. - **Vector Formulation (3D):** $\vec{M}_O = \vec{r} \times \vec{F}$ Where $\vec{r}$ is a position vector from point $O$ to any point on the line of action of $\vec{F}$. - **Moment about an Axis:** $M_{axis} = \vec{u}_{axis} \cdot (\vec{r} \times \vec{F})$ Where $\vec{u}_{axis}$ is the unit vector along the axis. ### Principle of Moments (Varignon's Theorem) - The moment of a force about a point is equal to the sum of the moments of its components about the same point. $$\vec{M}_O = \vec{r} \times (\vec{F}_1 + \vec{F}_2) = (\vec{r} \times \vec{F}_1) + (\vec{r} \times \vec{F}_2)$$ ### Couple Moment - **Definition:** Two parallel forces that are equal in magnitude, opposite in direction, and separated by a perpendicular distance $d$. - **Magnitude:** $M = Fd$ - **Vector Form:** $\vec{M} = \vec{r} \times \vec{F}$ Where $\vec{r}$ is a position vector from any point on $\vec{F}$ to any point on $-\vec{F}$. - A couple moment is a free vector (its effect is independent of its location). ### Force-Couple Systems & Equivalent Systems - A force $\vec{F}$ acting at point $A$ can be moved to point $O$ by adding a couple moment $\vec{M}_O = \vec{r}_{OA} \times \vec{F}$. - **Resultant Force:** $\vec{F}_R = \sum \vec{F}$ - **Resultant Couple Moment:** $\vec{M}_{R_O} = \sum \vec{M}_O + \sum \vec{M}_{couple}$ ### Equilibrium of a Rigid Body - **Conditions for Equilibrium:** $$\sum \vec{F} = \vec{0}$$ $$\sum \vec{M}_O = \vec{0}$$ Where $\sum \vec{M}_O$ is the sum of moments about any point $O$. - **In 2D (Coplanar Force System):** $$\sum F_x = 0$$ $$\sum F_y = 0$$ $$\sum M_O = 0$$ - **In 3D (General Force System):** $$\sum F_x = 0 \quad \sum F_y = 0 \quad \sum F_z = 0$$ $$\sum M_x = 0 \quad \sum M_y = 0 \quad \sum M_z = 0$$ - **Free-Body Diagram (FBD):** Crucial for identifying all external forces and moments. #### Common Supports and Reactions | Type of Support | 2D Reactions | 3D Reactions | |------------------------|---------------------------------|---------------------------------------------| | Roller | $R_y$ (perpendicular to surface) | $R_z$ | | Pin (Hinge) | $R_x, R_y$ | $R_x, R_y, R_z, M_x, M_y$ (no $M_z$) | | Fixed (Cantilever) | $R_x, R_y, M_z$ | $R_x, R_y, R_z, M_x, M_y, M_z$ | | Cable | $T$ (tension along cable) | $T$ (tension along cable) | | Smooth Surface | $N$ (normal to surface) | $N$ (normal to surface) | | Ball-and-Socket Joint | | $R_x, R_y, R_z$ | ### Trusses - **Assumptions:** 1. Members are joined by pins (frictionless). 2. Loads are applied only at the joints. - **Two-Force Members:** All members are two-force members (only axial force, tension or compression). - **Methods of Analysis:** - **Method of Joints:** Apply $\sum F_x = 0$ and $\sum F_y = 0$ at each joint. - **Method of Sections:** Cut the truss to expose desired members, then apply $\sum F_x = 0, \sum F_y = 0, \sum M_O = 0$ to a section. - **Zero-Force Members:** 1. If only two non-collinear members connect at a joint and no external load or reaction is applied, both are zero-force members. 2. If three members connect at a joint, two of which are collinear, and no external load or reaction is applied, the third member is a zero-force member. ### Frames and Machines - Structures with at least one multi-force member. - Always disassemble the frame/machine into its component parts and draw FBD for each part. - Internal forces between connected members are equal and opposite. ### Center of Gravity & Centroid - **Center of Gravity (CG):** Point where the entire weight of a body acts. $$ \bar{x} = \frac{\int x dW}{\int dW} \quad \bar{y} = \frac{\int y dW}{\int dW} \quad \bar{z} = \frac{\int z dW}{\int dW} $$ - **Centroid:** Geometric center of an area or volume (if homogeneous, coincides with CG). - **Area:** $$ \bar{x} = \frac{\int x dA}{\int dA} \quad \bar{y} = \frac{\int y dA}{\int dA} $$ - **Composite Bodies:** $$ \bar{x} = \frac{\sum \tilde{x} A}{\sum A} \quad \bar{y} = \frac{\sum \tilde{y} A}{\sum A} $$ ### Moments of Inertia - **Area Moment of Inertia (Second Moment of Area):** Measures a body's resistance to bending. $$ I_x = \int y^2 dA \quad I_y = \int x^2 dA $$ - **Polar Moment of Inertia:** Measures a body's resistance to torsion. $$ J_O = \int r^2 dA = I_x + I_y $$ - **Parallel-Axis Theorem:** Used to find the moment of inertia about an axis parallel to a centroidal axis. $$ I = \bar{I} + Ad^2 $$ Where $\bar{I}$ is the moment of inertia about the centroidal axis, $A$ is the area, and $d$ is the perpendicular distance between the two parallel axes. ### Kinematics of a Particle - **Rectilinear Motion:** - **Velocity:** $v = \frac{ds}{dt}$ - **Acceleration:** $a = \frac{dv}{dt} = \frac{d^2s}{dt^2}$ - **Relationship:** $a ds = v dv$ - **Constant Acceleration:** - $v = v_0 + a_c t$ - $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$ - $v^2 = v_0^2 + 2 a_c (s - s_0)$ - **Curvilinear Motion:** - **Cartesian Coordinates:** - $\vec{r} = x\vec{i} + y\vec{j} + z\vec{k}$ - $\vec{v} = \dot{x}\vec{i} + \dot{y}\vec{j} + \dot{z}\vec{k}$ - $\vec{a} = \ddot{x}\vec{i} + \ddot{y}\vec{j} + \ddot{z}\vec{k}$ - **Normal and Tangential Coordinates:** - $\vec{v} = v\vec{u}_t$ - $\vec{a} = \dot{v}\vec{u}_t + \frac{v^2}{\rho}\vec{u}_n$ Where $\rho$ is the radius of curvature. - **Cylindrical Coordinates:** - $\vec{r} = r\vec{u}_r + z\vec{u}_z$ - $\vec{v} = \dot{r}\vec{u}_r + r\dot{\theta}\vec{u}_\theta + \dot{z}\vec{u}_z$ - $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\vec{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\vec{u}_\theta + \ddot{z}\vec{u}_z$ ### Kinetics of a Particle - **Equation of Motion (Newton's Second Law):** $\sum \vec{F} = m\vec{a}$ - **Cartesian:** $\sum F_x = m a_x, \quad \sum F_y = m a_y, \quad \sum F_z = m a_z$ - **Normal-Tangential:** $\sum F_t = m a_t = m\dot{v}, \quad \sum F_n = m a_n = m\frac{v^2}{\rho}$ - **Cylindrical:** $\sum F_r = m a_r, \quad \sum F_\theta = m a_\theta, \quad \sum F_z = m a_z$ - **Work and Energy:** - **Work of a Force:** $U_{1-2} = \int_{s_1}^{s_2} \vec{F} \cdot d\vec{r}$ - **Kinetic Energy:** $T = \frac{1}{2}mv^2$ - **Principle of Work and Energy:** $T_1 + U_{1-2} = T_2$ - **Conservative Forces:** - Gravity: $V_g = W y$ - Spring: $V_e = \frac{1}{2}ks^2$ - **Conservation of Energy:** $T_1 + V_1 = T_2 + V_2$ (for conservative systems) - **Impulse and Momentum:** - **Linear Momentum:** $\vec{L} = m\vec{v}$ - **Linear Impulse:** $\text{Imp}_{1-2} = \int_{t_1}^{t_2} \vec{F} dt$ - **Principle of Linear Impulse and Momentum:** $m\vec{v}_1 + \sum \int \vec{F} dt = m\vec{v}_2$ - **Conservation of Linear Momentum:** $\sum m\vec{v}_1 = \sum m\vec{v}_2$ (if $\sum \vec{F}_{ext} = \vec{0}$) - **Impact:** - **Coefficient of Restitution:** $e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1}$ (along line of impact) ### Kinematics of a Rigid Body - **Rotation about a Fixed Axis:** - Angular velocity: $\omega = \frac{d\theta}{dt}$ - Angular acceleration: $\alpha = \frac{d\omega}{dt}$ - Relationship: $\alpha d\theta = \omega d\omega$ - Position: $s = r\theta$, Velocity: $v = r\omega$, Acceleration: $a_t = r\alpha, a_n = r\omega^2$ - **Absolute General Plane Motion Analysis:** - $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$ - $\vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$ - **Relative-Motion Analysis (Rotating Axes):** - $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A} + (\vec{v}_{B/A})_{xyz}$ - $\vec{a}_B = \vec{a}_A + \dot{\vec{\omega}} \times \vec{r}_{B/A} + \vec{\omega} \times (\vec{\omega} \times \vec{r}_{B/A}) + 2\vec{\omega} \times (\vec{v}_{B/A})_{xyz} + (\vec{a}_{B/A})_{xyz}$ - $(v_{B/A})_{xyz}$ is the relative velocity of B with respect to A as seen from the rotating frame. - $(a_{B/A})_{xyz}$ is the relative acceleration of B with respect to A as seen from the rotating frame. - $2\vec{\omega} \times (\vec{v}_{B/A})_{xyz}$ is the Coriolis acceleration. ### Kinetics of a Rigid Body - **Equations of Motion:** - **Translation:** $\sum \vec{F} = m\vec{a}_G$ - **Rotation about a Fixed Axis:** $\sum M_O = I_O \alpha$ - **General Plane Motion:** - $\sum F_x = m(a_G)_x$ - $\sum F_y = m(a_G)_y$ - $\sum M_G = I_G \alpha$ - (or $\sum M_P = I_P \alpha$ if P is a fixed point or instantaneous center of zero velocity) - **Mass Moment of Inertia:** $I = \int r^2 dm$ - **Parallel-Axis Theorem:** $I = \bar{I} + md^2$ - **Work and Energy:** - **Kinetic Energy (General Plane Motion):** $T = \frac{1}{2}m v_G^2 + \frac{1}{2} I_G \omega^2$ - **Principle of Work and Energy:** $T_1 + U_{1-2} = T_2$ - **Conservation of Energy:** $T_1 + V_1 = T_2 + V_2$ - **Impulse and Momentum:** - **Linear Impulse and Momentum:** $m(\vec{v}_G)_1 + \sum \int \vec{F} dt = m(\vec{v}_G)_2$ - **Angular Impulse and Momentum:** $(H_G)_1 + \sum \int M_G dt = (H_G)_2$ - For plane motion: $I_G \omega_1 + \sum \int M_G dt = I_G \omega_2$