Class 11 Physics Derivations
Cheatsheet Content
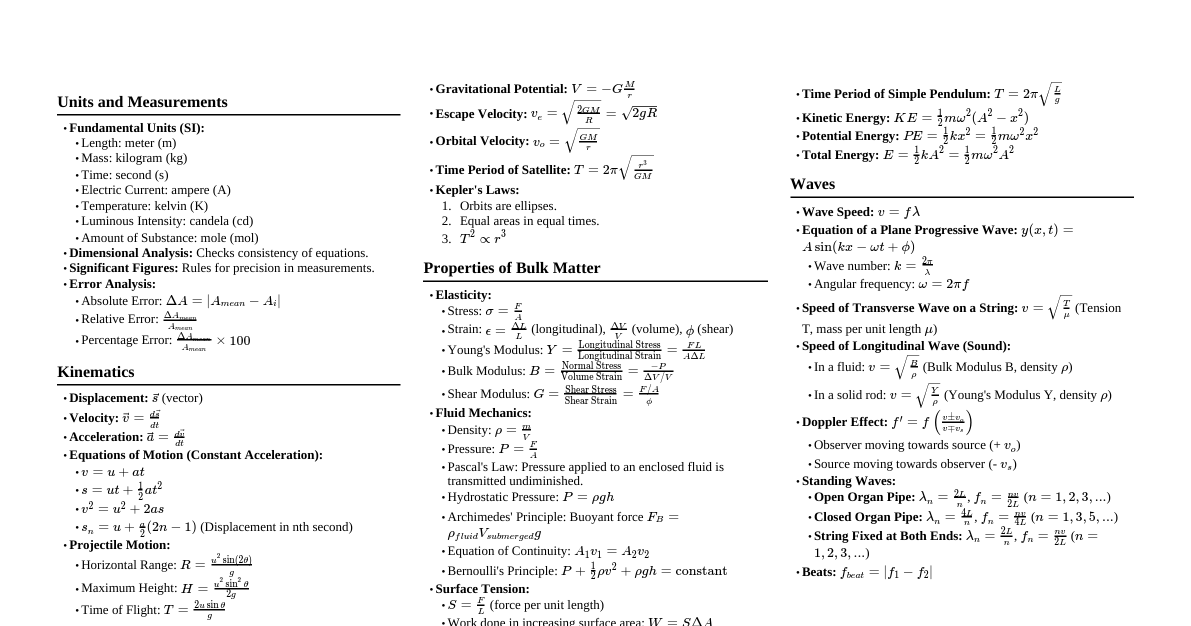
### Units and Dimensions - **Principle of Homogeneity:** Dimensions of each term on both sides of an equation must be the same. - **Dimensional Analysis Applications:** 1. To check the correctness of a physical equation. 2. To derive the relationship between physical quantities. 3. To convert a physical quantity from one system of units to another. ### Kinematics - **Equations of Motion (Constant Acceleration):** 1. **Velocity-Time Relation:** Consider a body with initial velocity $u$, constant acceleration $a$. After time $t$, its final velocity is $v$. Acceleration $a = \frac{dv}{dt}$ $\int_{u}^{v} dv = \int_{0}^{t} a \, dt$ $[v]_{u}^{v} = a[t]_{0}^{t}$ $v - u = at$ **$v = u + at$** 2. **Position-Time Relation:** Velocity $v = \frac{ds}{dt}$ Since $v = u + at$, $\frac{ds}{dt} = u + at$ $\int_{0}^{s} ds = \int_{0}^{t} (u + at) \, dt$ $[s]_{0}^{s} = [ut + \frac{1}{2}at^2]_{0}^{t}$ **$s = ut + \frac{1}{2}at^2$** 3. **Position-Velocity Relation:** From $a = \frac{dv}{dt}$ and $v = \frac{ds}{dt}$, we have $a = \frac{dv}{ds} \frac{ds}{dt} = v \frac{dv}{ds}$ $a \, ds = v \, dv$ $\int_{0}^{s} a \, ds = \int_{u}^{v} v \, dv$ $a[s]_{0}^{s} = [\frac{v^2}{2}]_{u}^{v}$ $as = \frac{v^2}{2} - \frac{u^2}{2}$ $2as = v^2 - u^2$ **$v^2 = u^2 + 2as$** 4. **Distance covered in $n^{th}$ second:** $S_n = S_t - S_{t-1}$ $S_n = (ut + \frac{1}{2}at^2) - (u(t-1) + \frac{1}{2}a(t-1)^2)$ $S_n = ut + \frac{1}{2}at^2 - (ut - u + \frac{1}{2}a(t^2 - 2t + 1))$ $S_n = ut + \frac{1}{2}at^2 - ut + u - \frac{1}{2}at^2 + at - \frac{1}{2}a$ **$S_n = u + a(t - \frac{1}{2}) = u + \frac{a}{2}(2t - 1)$** ### Newton's Laws of Motion - **Newton's Second Law:** The rate of change of momentum of a body is directly proportional to the applied force and takes place in the direction in which the force acts. $F \propto \frac{dp}{dt}$ $F = k \frac{dp}{dt}$ For $k=1$, $F = \frac{dp}{dt}$ Since $p = mv$ (for constant mass $m$) $F = \frac{d(mv)}{dt} = m \frac{dv}{dt}$ **$F = ma$** - **Conservation of Momentum (from Newton's Third Law):** Consider two bodies A and B colliding. Force on A due to B: $\vec{F}_{AB} = \frac{d\vec{p}_A}{dt}$ Force on B due to A: $\vec{F}_{BA} = \frac{d\vec{p}_B}{dt}$ By Newton's Third Law, $\vec{F}_{AB} = -\vec{F}_{BA}$ $\frac{d\vec{p}_A}{dt} = -\frac{d\vec{p}_B}{dt}$ $\frac{d\vec{p}_A}{dt} + \frac{d\vec{p}_B}{dt} = 0$ $\frac{d}{dt}(\vec{p}_A + \vec{p}_B) = 0$ **$\vec{p}_A + \vec{p}_B = \text{constant}$** (Total momentum is conserved) ### Work, Energy and Power - **Work-Energy Theorem:** The work done by the net force on a body is equal to the change in its kinetic energy. Consider a body of mass $m$ acted upon by a force $F$. Work done $W = \int F \, ds$ From Newton's Second Law, $F = ma = m \frac{dv}{dt}$ $W = \int m \frac{dv}{dt} \, ds$ Since $v = \frac{ds}{dt}$, $ds = v \, dt$ $W = \int m \frac{dv}{dt} v \, dt = \int m v \, dv$ If initial velocity is $u$ and final velocity is $v$, $W = \int_{u}^{v} mv \, dv = m [\frac{v^2}{2}]_{u}^{v}$ $W = \frac{1}{2}mv^2 - \frac{1}{2}mu^2$ **$W = K_f - K_i = \Delta K$** - **Potential Energy of a Spring:** Force exerted by spring $F_s = -kx$ (Hooke's Law) External force required to stretch/compress $F_{ext} = kx$ Work done by external force $W = \int_{0}^{x} F_{ext} \, dx = \int_{0}^{x} kx \, dx$ $W = k [\frac{x^2}{2}]_{0}^{x} = \frac{1}{2}kx^2$ This work is stored as potential energy $U$. **$U = \frac{1}{2}kx^2$** ### Gravitation - **Acceleration due to Gravity ($g$) at a height ($h$):** Gravitational force on mass $m$ at height $h$ from Earth's surface: $F = G \frac{M_e m}{(R_e + h)^2}$ Also, $F = mg_h$ So, $mg_h = G \frac{M_e m}{(R_e + h)^2}$ $g_h = G \frac{M_e}{(R_e + h)^2}$ We know $g = G \frac{M_e}{R_e^2}$ (acceleration due to gravity on surface) $g_h = G \frac{M_e}{R_e^2 (1 + h/R_e)^2} = g \frac{1}{(1 + h/R_e)^2}$ For $h \ll R_e$, using binomial approximation $(1+x)^n \approx 1+nx$: $g_h = g (1 + h/R_e)^{-2} \approx g (1 - 2h/R_e)$ **$g_h = g(1 - \frac{2h}{R_e})$** - **Acceleration due to Gravity ($g$) at a depth ($d$):** Consider a point at depth $d$ below Earth's surface. The mass contributing to gravity is only the sphere of radius $(R_e - d)$. Mass of sphere of radius $(R_e - d)$: $M' = \text{Density} \times \text{Volume} = \rho \times \frac{4}{3}\pi(R_e - d)^3$ Mass of Earth: $M_e = \rho \times \frac{4}{3}\pi R_e^3$ So, $M' = M_e \frac{(R_e - d)^3}{R_e^3}$ Acceleration due to gravity at depth $d$: $g_d = G \frac{M'}{(R_e - d)^2} = G \frac{M_e (R_e - d)^3 / R_e^3}{(R_e - d)^2}$ $g_d = G \frac{M_e (R_e - d)}{R_e^3}$ $g_d = G \frac{M_e}{R_e^2} \frac{(R_e - d)}{R_e}$ $g_d = g (1 - \frac{d}{R_e})$ **$g_d = g(1 - \frac{d}{R_e})$** - **Orbital Velocity of a Satellite:** For a satellite of mass $m$ orbiting Earth at height $h$ with orbital velocity $v_o$: Centripetal force = Gravitational force $\frac{mv_o^2}{(R_e + h)} = G \frac{M_e m}{(R_e + h)^2}$ $v_o^2 = G \frac{M_e}{(R_e + h)}$ **$v_o = \sqrt{\frac{GM_e}{R_e + h}}$** Since $GM_e = gR_e^2$, **$v_o = \sqrt{\frac{gR_e^2}{R_e + h}} = R_e \sqrt{\frac{g}{R_e + h}}$** - **Escape Velocity:** The minimum velocity required for an object to escape Earth's gravitational field. By conservation of energy: (Kinetic Energy + Potential Energy)$_{surface}$ = (Kinetic Energy + Potential Energy)$_{\infty}$ $\frac{1}{2}mv_{esc}^2 - G \frac{M_e m}{R_e} = 0 + 0$ (at infinity, KE and PE are zero) $\frac{1}{2}mv_{esc}^2 = G \frac{M_e m}{R_e}$ $v_{esc}^2 = \frac{2GM_e}{R_e}$ **$v_{esc} = \sqrt{\frac{2GM_e}{R_e}}$** Since $GM_e = gR_e^2$, **$v_{esc} = \sqrt{2gR_e}$** ### Mechanical Properties of Solids - **Relation between Young's Modulus ($Y$), Bulk Modulus ($B$), and Poisson's Ratio ($\sigma$):** **(Derivation is complex and often not expected in Class 11, usually given as formula)** **$Y = 3B(1 - 2\sigma)$** - **Relation between Young's Modulus ($Y$), Shear Modulus ($G$), and Poisson's Ratio ($\sigma$):** **(Derivation is complex and often not expected in Class 11, usually given as formula)** **$Y = 2G(1 + \sigma)$** - **Combining the above two relations to find relation between $Y, B, G$:** From $Y = 2G(1 + \sigma) \implies 1 + \sigma = Y/(2G) \implies \sigma = Y/(2G) - 1$ Substitute $\sigma$ into $Y = 3B(1 - 2\sigma)$: $Y = 3B(1 - 2(Y/(2G) - 1))$ $Y = 3B(1 - Y/G + 2)$ $Y = 3B(3 - Y/G)$ $Y = 9B - 3BY/G$ $Y + 3BY/G = 9B$ $Y(1 + 3B/G) = 9B$ $Y \frac{G + 3B}{G} = 9B$ **$Y = \frac{9BG}{3B + G}$** ### Mechanical Properties of Fluids - **Pressure Variation with Depth:** Consider a fluid column of height $h$ and cross-sectional area $A$. Force due to pressure on top surface: $F_1 = P_1 A$ (downwards) Force due to pressure on bottom surface: $F_2 = P_2 A$ (upwards) Weight of the fluid column: $W = mg = (\rho V)g = \rho (Ah) g$ (downwards) For equilibrium, $F_2 = F_1 + W$ $P_2 A = P_1 A + \rho A h g$ Divide by $A$: **$P_2 = P_1 + \rho g h$** If $P_1$ is atmospheric pressure $P_a$ and $P_2$ is pressure at depth $h$, then $P = P_a + \rho g h$. - **Equation of Continuity:** For an incompressible, non-viscous fluid in steady flow through a pipe of varying cross-section. Mass of fluid entering section 1 in time $\Delta t$: $m_1 = \rho_1 A_1 v_1 \Delta t$ Mass of fluid leaving section 2 in time $\Delta t$: $m_2 = \rho_2 A_2 v_2 \Delta t$ By conservation of mass, $m_1 = m_2$ $\rho_1 A_1 v_1 \Delta t = \rho_2 A_2 v_2 \Delta t$ $\rho_1 A_1 v_1 = \rho_2 A_2 v_2$ For incompressible fluid, $\rho_1 = \rho_2 = \rho$ **$A_1 v_1 = A_2 v_2$** (or $Av = \text{constant}$) - **Bernoulli's Principle:** Based on conservation of energy for an ideal fluid. Consider a fluid flowing through a pipe of varying cross-section and height. Work done on fluid entering at A: $W_1 = P_1 A_1 v_1 \Delta t$ Work done by fluid leaving at B: $W_2 = P_2 A_2 v_2 \Delta t$ Net work done on the fluid: $W_{net} = P_1 A_1 v_1 \Delta t - P_2 A_2 v_2 \Delta t$ Change in kinetic energy: $\Delta K = \frac{1}{2}m v_2^2 - \frac{1}{2}m v_1^2$ Change in potential energy: $\Delta U = m g h_2 - m g h_1$ By Work-Energy theorem, $W_{net} = \Delta K + \Delta U$ $P_1 A_1 v_1 \Delta t - P_2 A_2 v_2 \Delta t = (\frac{1}{2}v_2^2 - \frac{1}{2}v_1^2)m + (g h_2 - g h_1)m$ Substitute $m = \rho A v \Delta t$ (mass of fluid entering/leaving) $P_1 - P_2 = (\frac{1}{2}v_2^2 - \frac{1}{2}v_1^2)\rho + (g h_2 - g h_1)\rho$ Rearranging terms: **$P_1 + \frac{1}{2}\rho v_1^2 + \rho g h_1 = P_2 + \frac{1}{2}\rho v_2^2 + \rho g h_2$** **$P + \frac{1}{2}\rho v^2 + \rho g h = \text{constant}$** - **Terminal Velocity:** When a sphere falls through a viscous fluid, it reaches a constant velocity (terminal velocity) when the gravitational force is balanced by the buoyant force and viscous drag force. Gravitational force: $F_g = mg = V\rho_s g = \frac{4}{3}\pi r^3 \rho_s g$ Buoyant force: $F_b = V\rho_f g = \frac{4}{3}\pi r^3 \rho_f g$ Viscous drag force (Stokes' Law): $F_v = 6\pi \eta r v_t$ At terminal velocity $v_t$, $F_g = F_b + F_v$ $\frac{4}{3}\pi r^3 \rho_s g = \frac{4}{3}\pi r^3 \rho_f g + 6\pi \eta r v_t$ $6\pi \eta r v_t = \frac{4}{3}\pi r^3 g (\rho_s - \rho_f)$ $v_t = \frac{4\pi r^3 g (\rho_s - \rho_f)}{3 \times 6\pi \eta r}$ **$v_t = \frac{2 r^2 g (\rho_s - \rho_f)}{9 \eta}$** ### Oscillations - **Simple Harmonic Motion (SHM) - Differential Equation:** For SHM, the restoring force is proportional to the displacement and directed opposite to it: $F = -kx$ From Newton's Second Law, $F = ma = m \frac{d^2x}{dt^2}$ So, $m \frac{d^2x}{dt^2} = -kx$ $\frac{d^2x}{dt^2} + \frac{k}{m}x = 0$ Let $\omega^2 = \frac{k}{m}$, where $\omega$ is the angular frequency. **$\frac{d^2x}{dt^2} + \omega^2 x = 0$** (Differential equation of SHM) Solution: $x(t) = A \cos(\omega t + \phi)$ - **Time Period of a Simple Pendulum:** Consider a simple pendulum of length $L$ and bob mass $m$, displaced by a small angle $\theta$. Restoring force (tangential component of weight): $F = -mg \sin\theta$ For small angles, $\sin\theta \approx \theta$. $F = -mg\theta$ Also, arc length $x = L\theta$, so $\theta = x/L$. $F = -mg \frac{x}{L}$ Comparing with $F = -kx$, the effective spring constant is $k = \frac{mg}{L}$. The time period of SHM is $T = 2\pi \sqrt{\frac{m}{k}}$ $T = 2\pi \sqrt{\frac{m}{mg/L}}$ **$T = 2\pi \sqrt{\frac{L}{g}}$** ### Waves - **Speed of Transverse Wave on a Stretched String:** **(Derivation is complex and often involves dimensional analysis or complex mechanics not fully covered in Class 11)** The speed $v$ of a transverse wave on a stretched string depends on the tension $T$ in the string and its linear mass density $\mu$ (mass per unit length). Using dimensional analysis: $[v] = LT^{-1}$ $[T] = MLT^{-2}$ $[\mu] = ML^{-1}$ Assume $v \propto T^a \mu^b$ $LT^{-1} = (MLT^{-2})^a (ML^{-1})^b$ $L^1 T^{-1} M^0 = M^{a+b} L^{a-b} T^{-2a}$ Comparing powers: For T: $-1 = -2a \implies a = 1/2$ For M: $0 = a+b \implies b = -a = -1/2$ For L: $1 = a-b \implies 1 = 1/2 - (-1/2) = 1$ (consistent) So, $v \propto T^{1/2} \mu^{-1/2} = \sqrt{\frac{T}{\mu}}$ The constant of proportionality is 1. **$v = \sqrt{\frac{T}{\mu}}$** - **Newton's Formula for Speed of Sound in a Gas:** Newton assumed that sound propagation in a gas is an isothermal process. For isothermal process, $PV = \text{constant}$. Differentiating: $P dV + V dP = 0 \implies P dV = -V dP \implies -V \frac{dP}{dV} = P$ Bulk modulus $B = -V \frac{dP}{dV}$. So, $B_{iso} = P$. Speed of sound $v = \sqrt{\frac{B}{\rho}}$ **$v = \sqrt{\frac{P}{\rho}}$** (This formula was incorrect historically) - **Laplace's Correction for Speed of Sound in a Gas:** Laplace corrected Newton's assumption, stating that sound propagation is an adiabatic process. For adiabatic process, $PV^\gamma = \text{constant}$, where $\gamma = C_p/C_v$. Differentiating: $V^\gamma dP + P \gamma V^{\gamma-1} dV = 0$ $V dP + P \gamma dV = 0$ $V dP = -P \gamma dV$ $-V \frac{dP}{dV} = \gamma P$ Bulk modulus $B_{adia} = \gamma P$. Speed of sound $v = \sqrt{\frac{B_{adia}}{\rho}}$ **$v = \sqrt{\frac{\gamma P}{\rho}}$** (This matches experimental values much better)