กลศาสตร์วิศวกรรม (Hibbeler)
Shared 5/6/2026•0 views
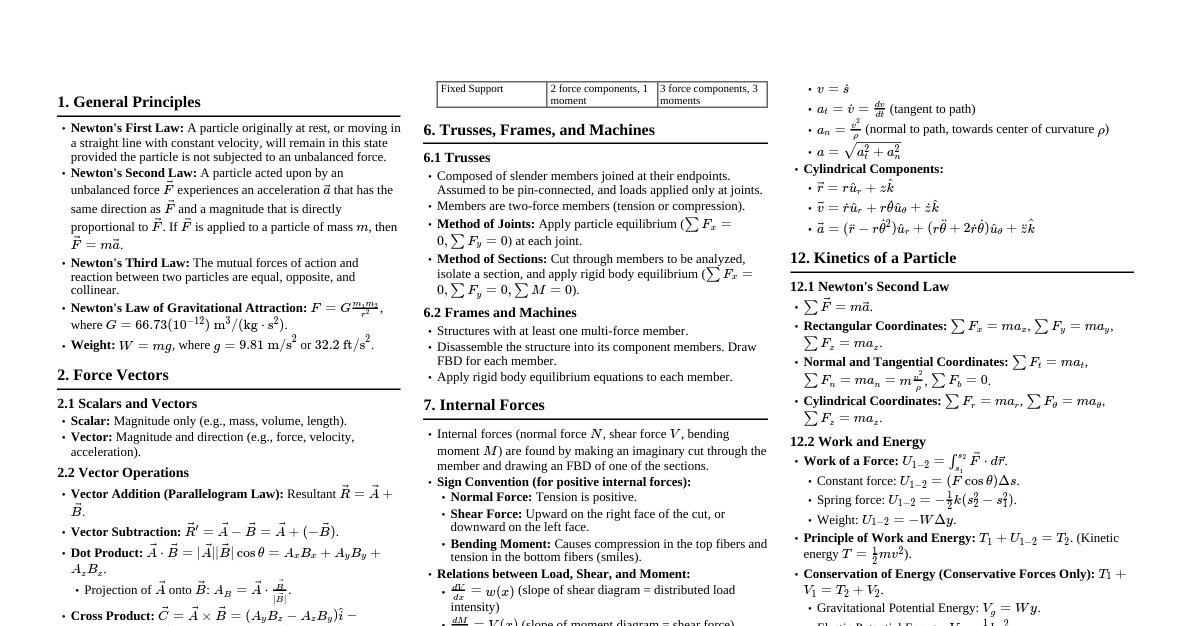
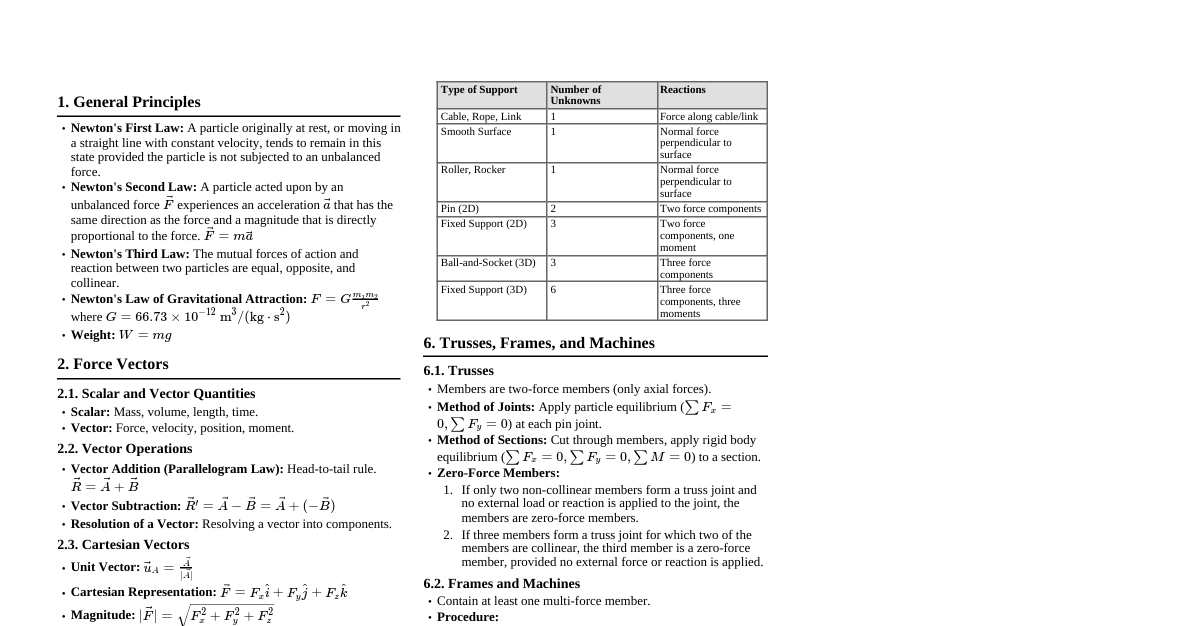
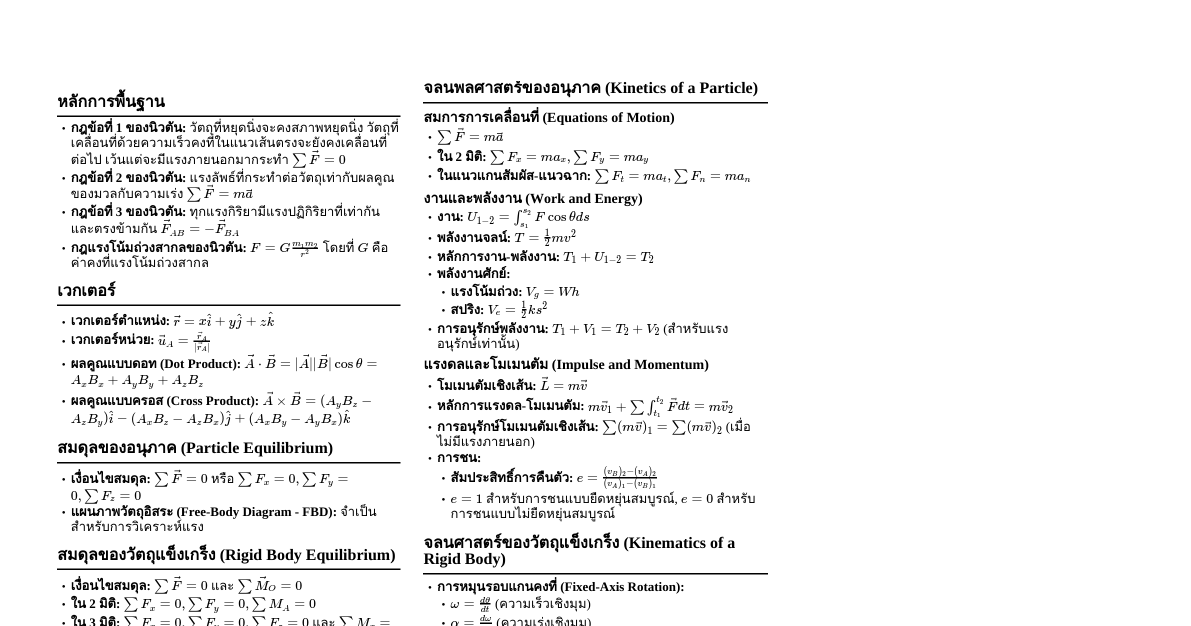
### บทนำ วิชากลศาสตร์วิศวกรรมศึกษาเกี่ยวกับพฤติกรรมของวัตถุภายใต้แรงกระทำ แบ่งเป็น 2 สาขาหลัก: - **สถิตศาสตร์ (Statics):** ศึกษาวัตถุที่อยู่ในภาวะสมดุล (นิ่งหรือเคลื่อนที่ด้วยความเร็วคงที่) - **พลศาสตร์ (Dynamics):** ศึกษาวัตถุที่เคลื่อนที่ด้วยความเร่ง (การเคลื่อนที่ของอนุภาคและวัตถุแข็งเกร็ง) ### เวกเตอร์ - **ปริมาณสเกลาร์:** มีเพียงขนาด (มวล, เวลา, ปริมาตร) - **ปริมาณเวกเตอร์:** มีทั้งขนาดและทิศทาง (แรง, ความเร็ว, ความเร่ง) - **การบวกเวกเตอร์ (กฎสี่เหลี่ยมด้านขนาน):** $\vec{R} = \vec{A} + \vec{B}$ - **การแตกแรง (Components):** - 2 มิติ: $\vec{F} = F_x \hat{i} + F_y \hat{j}$ โดยที่ $F_x = F \cos\theta$, $F_y = F \sin\theta$ - 3 มิติ: $\vec{F} = F_x \hat{i} + F_y \hat{j} + F_z \hat{k}$ โดยที่ $F_x = F \cos\alpha$, $F_y = F \cos\beta$, $F_z = F \cos\gamma$ - เวกเตอร์หนึ่งหน่วย: $\hat{u}_F = \frac{\vec{F}}{F} = \frac{F_x}{F} \hat{i} + \frac{F_y}{F} \hat{j} + \frac{F_z}{F} \hat{k}$ - **ผลคูณเชิงสเกลาร์ (Dot Product):** $\vec{A} \cdot \vec{B} = AB \cos\theta = A_x B_x + A_y B_y + A_z B_z$ - ใช้หา: มุมระหว่างเวกเตอร์, ส่วนประกอบของเวกเตอร์บนอีกเวกเตอร์ - **ผลคูณเชิงเวกเตอร์ (Cross Product):** $\vec{C} = \vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} + (A_z B_x - A_x B_z)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$ - ขนาด: $|\vec{C}| = AB \sin\theta$ - ทิศทาง: กฎมือขวา - ใช้หา: โมเมนต์ของแรง ### ระบบแรง - **หลักการส่งผ่านแรง (Principle of Transmissibility):** แรงที่กระทำต่อวัตถุแข็งเกร็งสามารถเลื่อนตำแหน่งไปตามแนวแรงได้โดยไม่เปลี่ยนผลลัพธ์ภายนอก - **โมเมนต์ของแรง (Moment of a Force):** - รอบจุด: $M_O = Fd$ (d คือระยะตั้งฉากจากจุดถึงแนวแรง) - ในรูปเวกเตอร์: $\vec{M}_O = \vec{r} \times \vec{F}$ (r คือเวกเตอร์ตำแหน่งจากจุด O ไปยังจุดใดๆ บนแนวแรง) - โมเมนต์สเกลาร์รอบแกน: $M_a = \hat{u}_a \cdot (\vec{r} \times \vec{F})$ - **แรงคู่ควบ (Couple Moment):** $M = Fd$ (F คือขนาดของแรงใดแรงหนึ่ง, d คือระยะตั้งฉากระหว่างแรงทั้งสอง) - ทิศทาง: ตามกฎมือขวา - **การลดรูปแรงและโมเมนต์ (Reduction of a Simple System):** ระบบแรง-โมเมนต์ที่ซับซ้อนสามารถลดรูปเป็นแรงลัพธ์ $\vec{F}_R = \sum \vec{F}$ และโมเมนต์ลัพธ์ $\vec{M}_{R_O} = \sum \vec{M}_O + \sum (\vec{r} \times \vec{F})$ ณ จุดใดจุดหนึ่ง ### สมดุลของวัตถุแข็งเกร็ง - **สมการสมดุล (Equilibrium Equations):** - 2 มิติ: - $\sum F_x = 0$ - $\sum F_y = 0$ - $\sum M_O = 0$ (โมเมนต์รอบจุด O ใดๆ) - 3 มิติ: - $\sum F_x = 0$, $\sum F_y = 0$, $\sum F_z = 0$ - $\sum M_x = 0$, $\sum M_y = 0$, $\sum M_z = 0$ (โมเมนต์รอบแกน x, y, z) - **แผนภาพวัตถุอิสระ (Free-Body Diagram, FBD):** แสดงวัตถุและแรงภายนอกทั้งหมดที่กระทำต่อวัตถุ (แรงปฏิกิริยาจากจุดรองรับ, แรงกระทำ, น้ำหนัก) - **ประเภทของการรองรับ (Types of Supports):** - **Roller/Rocker:** แรงปฏิกิริยา 1 แรง ตั้งฉากกับพื้นผิว - **Pin/Hinge:** แรงปฏิกิริยา 2 แรง (Fx, Fy) หรือ 1 แรงและ 1 โมเมนต์ - **Fixed Support:** แรงปฏิกิริยา 2 แรง (Fx, Fy) และ 1 โมเมนต์ (2 มิติ) หรือ 3 แรง (Fx, Fy, Fz) และ 3 โมเมนต์ (Mx, My, Mz) (3 มิติ) ### แรงเสียดทาน - **แรงเสียดทานสถิต (Static Friction):** $F_s \le \mu_s N$ - เมื่อวัตถุเริ่มเคลื่อนที่: $F_s = (F_s)_{max} = \mu_s N$ - **แรงเสียดทานจลน์ (Kinetic Friction):** $F_k = \mu_k N$ - $\mu_s$ (สัมประสิทธิ์แรงเสียดทานสถิต) > $\mu_k$ (สัมประสิทธิ์แรงเสียดทานจลน์) ### จลนศาสตร์ของอนุภาค (Kinematics of a Particle) - **การเคลื่อนที่แนวตรง (Rectilinear Motion):** - ความเร็ว: $v = \frac{ds}{dt}$ - ความเร่ง: $a = \frac{dv}{dt} = v \frac{dv}{ds}$ - สูตรสำหรับความเร่งคงที่: - $v = v_0 + a_c t$ - $s = s_0 + v_0 t + \frac{1}{2} a_c t^2$ - $v^2 = v_0^2 + 2 a_c (s - s_0)$ - **การเคลื่อนที่แบบวิถีโค้ง (Curvilinear Motion):** - **แกนฉาก (Rectangular Components):** - $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ - $\vec{v} = \dot{x}\hat{i} + \dot{y}\hat{j} + \dot{z}\hat{k}$ - $\vec{a} = \ddot{x}\hat{i} + \ddot{y}\hat{j} + \ddot{z}\hat{k}$ - **แกนแนวสัมผัส-แนวฉาก (Normal and Tangential Components):** - $\vec{v} = v\hat{u}_t$ - $\vec{a} = a_t \hat{u}_t + a_n \hat{u}_n$ - $a_t = \dot{v}$ (ความเร่งตามแนวสัมผัส) - $a_n = \frac{v^2}{\rho}$ (ความเร่งเข้าสู่ศูนย์กลาง, $\rho$ คือรัศมีของความโค้ง) - **แกนเชิงขั้ว (Cylindrical Components):** - $\vec{r} = r\hat{u}_r + z\hat{k}$ - $\vec{v} = \dot{r}\hat{u}_r + r\dot{\theta}\hat{u}_\theta + \dot{z}\hat{k}$ - $\vec{a} = (\ddot{r} - r\dot{\theta}^2)\hat{u}_r + (r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{u}_\theta + \ddot{z}\hat{k}$ ### จลนพลศาสตร์ของอนุภาค (Kinetics of a Particle) - **กฎการเคลื่อนที่ของนิวตันข้อที่สอง:** $\sum \vec{F} = m\vec{a}$ - แกนฉาก: $\sum F_x = m a_x$, $\sum F_y = m a_y$, $\sum F_z = m a_z$ - แกนแนวสัมผัส-แนวฉาก: $\sum F_t = m a_t$, $\sum F_n = m a_n$ - แกนเชิงขั้ว: $\sum F_r = m a_r$, $\sum F_\theta = m a_\theta$, $\sum F_z = m a_z$ - **งานและพลังงาน (Work and Energy):** - งานที่ทำโดยแรง: $U_{1-2} = \int_{s_1}^{s_2} \vec{F} \cdot d\vec{r}$ - พลังงานจลน์: $T = \frac{1}{2} m v^2$ - หลักการงาน-พลังงาน: $T_1 + U_{1-2} = T_2$ - พลังงานศักย์ (Potential Energy): - แรงโน้มถ่วง: $V_g = W y$ - สปริง: $V_e = \frac{1}{2} k s^2$ - การอนุรักษ์พลังงาน: $T_1 + V_1 = T_2 + V_2$ (สำหรับระบบอนุรักษ์) - **แรงดลและโมเมนตัม (Impulse and Momentum):** - โมเมนตัมเชิงเส้น: $\vec{L} = m\vec{v}$ - แรงดลเชิงเส้น: $\int_{t_1}^{t_2} \vec{F} dt$ - หลักการแรงดล-โมเมนตัมเชิงเส้น: $m\vec{v}_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m\vec{v}_2$ - โมเมนตัมเชิงมุม: $\vec{H}_O = \vec{r} \times m\vec{v}$ - แรงดลเชิงมุม: $\int_{t_1}^{t_2} \vec{M}_O dt$ - หลักการแรงดล-โมเมนตัมเชิงมุม: $(\vec{H}_O)_1 + \sum \int_{t_1}^{t_2} \vec{M}_O dt = (\vec{H}_O)_2$ - การอนุรักษ์โมเมนตัม: $\sum m\vec{v}_1 = \sum m\vec{v}_2$ (เมื่อไม่มีแรงภายนอก) - การชน (Impact): - สัมประสิทธิ์การคืนตัว (Coefficient of Restitution): $e = \frac{(v_B')_n - (v_A')_n}{(v_A)_n - (v_B)_n}$ - $e=1$ สำหรับการชนแบบยืดหยุ่นสมบูรณ์ - $e=0$ สำหรับการชนแบบไม่ยืดหยุ่นสมบูรณ์ ### จลนศาสตร์ของวัตถุแข็งเกร็ง (Kinematics of a Rigid Body) - **การเคลื่อนที่แบบหมุนรอบแกนคงที่:** - ความเร็วเชิงมุม: $\omega = \frac{d\theta}{dt}$ - ความเร่งเชิงมุม: $\alpha = \frac{d\omega}{dt} = \omega \frac{d\omega}{d\theta}$ - ความเร็วสัมผัส: $v = \omega r$ - ความเร่งสัมผัส: $a_t = \alpha r$ - ความเร่งแนวฉาก: $a_n = \omega^2 r = \frac{v^2}{r}$ - **การเคลื่อนที่ทั่วไปแบบระนาบ (General Plane Motion):** - ความเร็วสัมพัทธ์: $\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$ - ความเร่งสัมพัทธ์: $\vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$ - **ศูนย์กลางความเร็วชั่วขณะ (Instantaneous Center of Zero Velocity, IC):** จุดบนวัตถุแข็งเกร็งที่มีความเร็วเป็นศูนย์ ณ ขณะหนึ่ง ### จลนพลศาสตร์ของวัตถุแข็งเกร็ง (Kinetics of a Rigid Body) - **สมการการเคลื่อนที่ (Equations of Motion):** - $\sum \vec{F} = m\vec{a}_G$ (G คือจุดศูนย์ถ่วง) - $\sum \vec{M}_G = I_G \vec{\alpha}$ หรือ $\sum \vec{M}_P = I_P \vec{\alpha}$ (P คือจุดหมุนคงที่) - $I_G$ คือโมเมนต์ความเฉื่อยรอบจุดศูนย์ถ่วง - $I_P = I_G + m d^2$ (ทฤษฎีแกนขนาน, d คือระยะจาก G ถึง P) - **งานและพลังงาน (Work and Energy):** - พลังงานจลน์: $T = \frac{1}{2} m v_G^2 + \frac{1}{2} I_G \omega^2$ - หลักการงาน-พลังงาน: $T_1 + U_{1-2} = T_2$ - **แรงดลและโมเมนตัม (Impulse and Momentum):** - โมเมนตัมเชิงเส้น: $\vec{L} = m\vec{v}_G$ - โมเมนตัมเชิงมุม: $\vec{H}_G = I_G \vec{\omega}$ หรือ $\vec{H}_P = I_P \vec{\omega}$ - หลักการแรงดล-โมเมนตัมเชิงเส้น: $m(\vec{v}_G)_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m(\vec{v}_G)_2$ - หลักการแรงดล-โมเมนตัมเชิงมุม: $(H_G)_1 + \sum \int_{t_1}^{t_2} M_G dt = (H_G)_2$