สรุปกลศาสตร์ (Hibbeler)
Cheatsheet Content
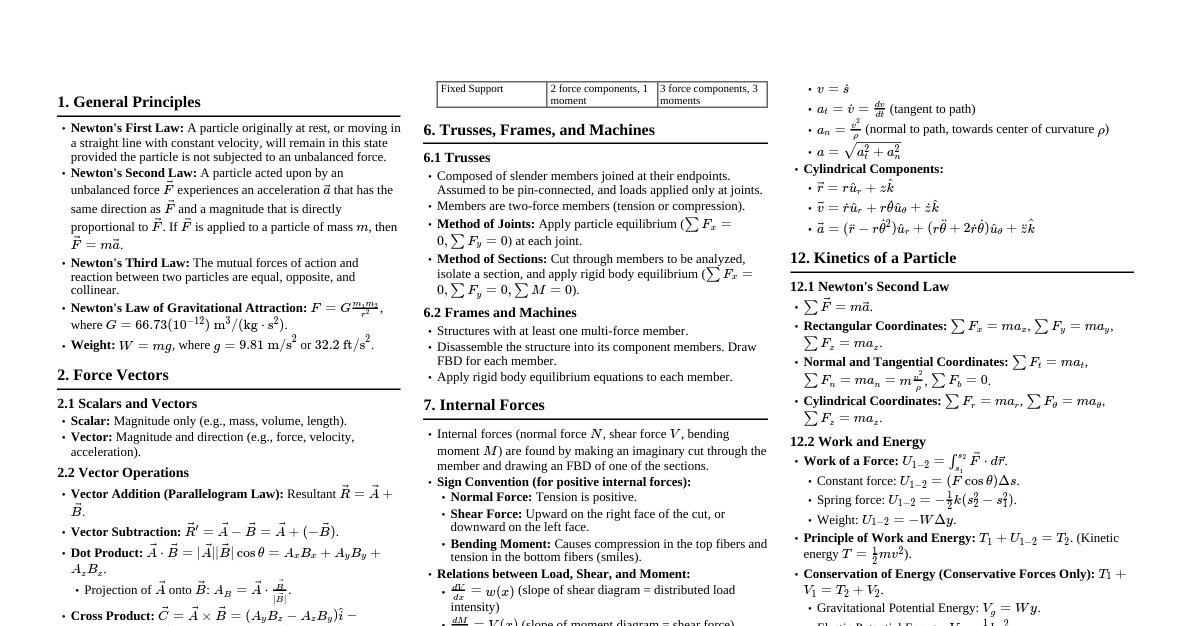
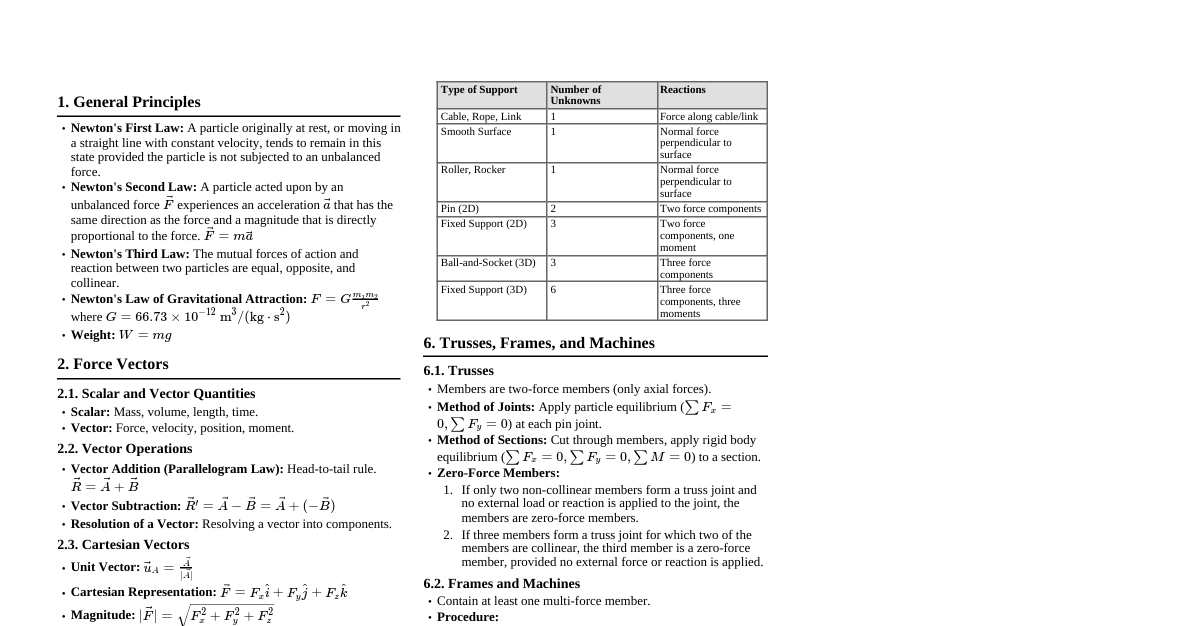
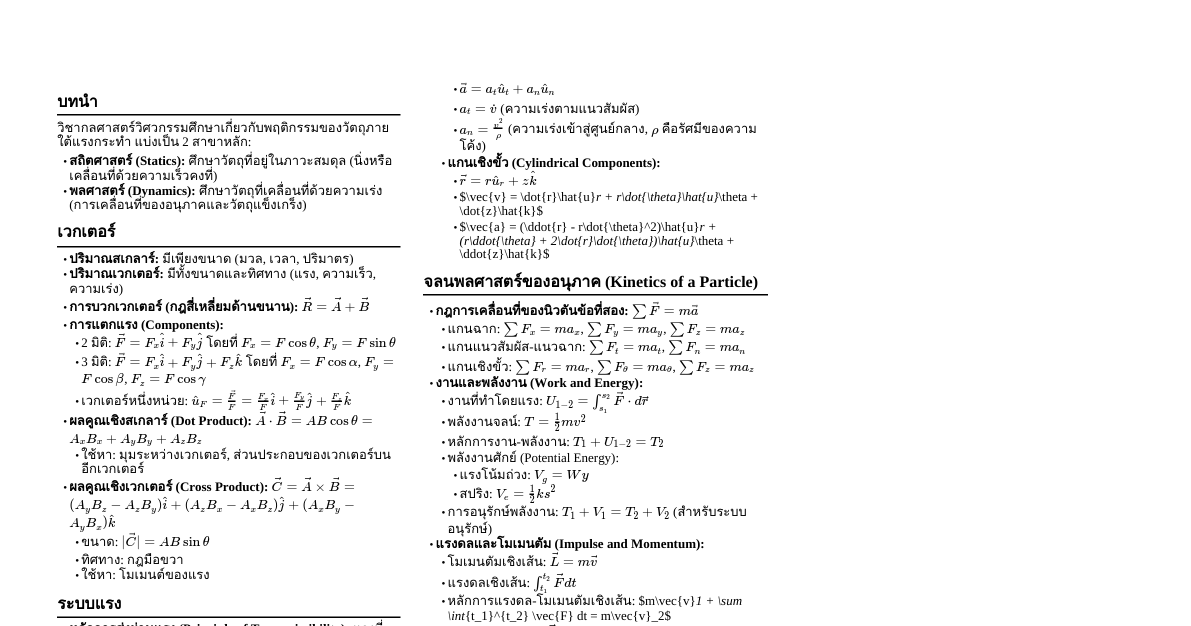
หลักการพื้นฐาน กฎข้อที่ 1 ของนิวตัน: วัตถุที่หยุดนิ่งจะคงสภาพหยุดนิ่ง วัตถุที่เคลื่อนที่ด้วยความเร็วคงที่ในแนวเส้นตรงจะยังคงเคลื่อนที่ต่อไป เว้นแต่จะมีแรงภายนอกมากระทำ $ \sum \vec{F} = 0 $ กฎข้อที่ 2 ของนิวตัน: แรงลัพธ์ที่กระทำต่อวัตถุเท่ากับผลคูณของมวลกับความเร่ง $ \sum \vec{F} = m\vec{a} $ กฎข้อที่ 3 ของนิวตัน: ทุกแรงกิริยามีแรงปฏิกิริยาที่เท่ากันและตรงข้ามกัน $ \vec{F}_{AB} = -\vec{F}_{BA} $ กฎแรงโน้มถ่วงสากลของนิวตัน: $ F = G \frac{m_1 m_2}{r^2} $ โดยที่ $G$ คือค่าคงที่แรงโน้มถ่วงสากล เวกเตอร์ เวกเตอร์ตำแหน่ง: $ \vec{r} = x\hat{i} + y\hat{j} + z\hat{k} $ เวกเตอร์หน่วย: $ \vec{u}_A = \frac{\vec{r}_A}{|\vec{r}_A|} $ ผลคูณแบบดอท (Dot Product): $ \vec{A} \cdot \vec{B} = |\vec{A}||\vec{B}|\cos\theta = A_x B_x + A_y B_y + A_z B_z $ ผลคูณแบบครอส (Cross Product): $ \vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} - (A_x B_z - A_z B_x)\hat{j} + (A_x B_y - A_y B_x)\hat{k} $ สมดุลของอนุภาค (Particle Equilibrium) เงื่อนไขสมดุล: $ \sum \vec{F} = 0 $ หรือ $ \sum F_x = 0, \sum F_y = 0, \sum F_z = 0 $ แผนภาพวัตถุอิสระ (Free-Body Diagram - FBD): จำเป็นสำหรับการวิเคราะห์แรง สมดุลของวัตถุแข็งเกร็ง (Rigid Body Equilibrium) เงื่อนไขสมดุล: $ \sum \vec{F} = 0 $ และ $ \sum \vec{M}_O = 0 $ ใน 2 มิติ: $ \sum F_x = 0, \sum F_y = 0, \sum M_A = 0 $ ใน 3 มิติ: $ \sum F_x = 0, \sum F_y = 0, \sum F_z = 0 $ และ $ \sum M_x = 0, \sum M_y = 0, \sum M_z = 0 $ การวิเคราะห์โครงสร้าง (Structural Analysis) โครงข้อหมุน (Trusses) สมมติฐาน: โหลดกระทำที่ข้อต่อ, ข้อต่อเป็นแบบหมุด, น้ำหนักชิ้นส่วนน้อยมาก วิธีรอยต่อ (Method of Joints): ใช้ $ \sum F_x = 0, \sum F_y = 0 $ ที่แต่ละรอยต่อ วิธีส่วนตัด (Method of Sections): ตัดโครงสร้างออกเป็นส่วนๆ ใช้สมดุลของวัตถุแข็งเกร็ง โครงเฟรมและเครื่องจักร (Frames and Machines) แยกชิ้นส่วนแต่ละชิ้นออกจากกัน แล้วเขียน FBD ของแต่ละชิ้น แรงเสียดทาน (Friction) แรงเสียดทานสถิตสูงสุด: $ F_s = \mu_s N $ (เมื่อวัตถุเริ่มเคลื่อนที่) แรงเสียดทานจลน์: $ F_k = \mu_k N $ (เมื่อวัตถุเคลื่อนที่) $ \mu_s $ คือสัมประสิทธิ์แรงเสียดทานสถิต, $ \mu_k $ คือสัมประสิทธิ์แรงเสียดทานจลน์ ($ \mu_k จุดศูนย์ถ่วงและเซนทรอยด์ (Centroid and Center of Gravity) เซนทรอยด์ของพื้นที่: $ \bar{x} = \frac{\int x dA}{\int dA}, \bar{y} = \frac{\int y dA}{\int dA} $ จุดศูนย์ถ่วงของมวล: $ \bar{x} = \frac{\sum \tilde{x} W}{\sum W}, \bar{y} = \frac{\sum \tilde{y} W}{\sum W}, \bar{z} = \frac{\sum \tilde{z} W}{\sum W} $ ทฤษฎีปัปปัส-กูลดุนุส (Pappus-Guldinus Theorems): สำหรับหาพื้นที่ผิวและปริมาตรของรูปทรงหมุน โมเมนต์ความเฉื่อย (Moments of Inertia) โมเมนต์ความเฉื่อยรอบแกน: $ I_x = \int y^2 dA, I_y = \int x^2 dA $ โมเมนต์ความเฉื่อยเชิงขั้ว: $ J_O = \int r^2 dA = I_x + I_y $ ทฤษฎีแกนขนาน (Parallel-Axis Theorem): $ I = \bar{I} + Ad^2 $ ใช้สำหรับวิเคราะห์การดัดและการโก่งตัวของคาน จลนศาสตร์ของอนุภาค (Kinematics of a Particle) การเคลื่อนที่เชิงเส้นตรง (Rectilinear Motion) ความเร็ว: $ v = \frac{ds}{dt} $ ความเร่ง: $ a = \frac{dv}{dt} = \frac{d^2s}{dt^2} $ ความสัมพันธ์: $ a ds = v dv $ ความเร่งคงที่: $ v = v_0 + at $ $ s = s_0 + v_0 t + \frac{1}{2}at^2 $ $ v^2 = v_0^2 + 2a(s - s_0) $ การเคลื่อนที่เชิงเส้นโค้ง (Curvilinear Motion) เวกเตอร์ตำแหน่ง: $ \vec{r}(t) $ เวกเตอร์ความเร็ว: $ \vec{v} = \frac{d\vec{r}}{dt} $ เวกเตอร์ความเร่ง: $ \vec{a} = \frac{d\vec{v}}{dt} $ องค์ประกอบ: สี่เหลี่ยมผืนผ้า (Cartesian): $ v_x = \dot{x}, v_y = \dot{y}, a_x = \ddot{x}, a_y = \ddot{y} $ แนวแกนสัมผัส-แนวฉาก (Normal-Tangential): $ a_t = \dot{v}, a_n = \frac{v^2}{\rho} $ โดย $ \rho $ คือรัศมีความโค้ง เชิงขั้ว (Polar): $ v_r = \dot{r}, v_\theta = r\dot{\theta}, a_r = \ddot{r} - r\dot{\theta}^2, a_\theta = r\ddot{\theta} + 2\dot{r}\dot{\theta} $ จลนพลศาสตร์ของอนุภาค (Kinetics of a Particle) สมการการเคลื่อนที่ (Equations of Motion) $ \sum \vec{F} = m\vec{a} $ ใน 2 มิติ: $ \sum F_x = ma_x, \sum F_y = ma_y $ ในแนวแกนสัมผัส-แนวฉาก: $ \sum F_t = ma_t, \sum F_n = ma_n $ งานและพลังงาน (Work and Energy) งาน: $ U_{1-2} = \int_{s_1}^{s_2} F \cos\theta ds $ พลังงานจลน์: $ T = \frac{1}{2}mv^2 $ หลักการงาน-พลังงาน: $ T_1 + U_{1-2} = T_2 $ พลังงานศักย์: แรงโน้มถ่วง: $ V_g = Wh $ สปริง: $ V_e = \frac{1}{2}ks^2 $ การอนุรักษ์พลังงาน: $ T_1 + V_1 = T_2 + V_2 $ (สำหรับแรงอนุรักษ์เท่านั้น) แรงดลและโมเมนตัม (Impulse and Momentum) โมเมนตัมเชิงเส้น: $ \vec{L} = m\vec{v} $ หลักการแรงดล-โมเมนตัม: $ m\vec{v}_1 + \sum \int_{t_1}^{t_2} \vec{F} dt = m\vec{v}_2 $ การอนุรักษ์โมเมนตัมเชิงเส้น: $ \sum (m\vec{v})_1 = \sum (m\vec{v})_2 $ (เมื่อไม่มีแรงภายนอก) การชน: สัมประสิทธิ์การคืนตัว: $ e = \frac{(v_B)_2 - (v_A)_2}{(v_A)_1 - (v_B)_1} $ $ e=1 $ สำหรับการชนแบบยืดหยุ่นสมบูรณ์, $ e=0 $ สำหรับการชนแบบไม่ยืดหยุ่นสมบูรณ์ จลนศาสตร์ของวัตถุแข็งเกร็ง (Kinematics of a Rigid Body) การหมุนรอบแกนคงที่ (Fixed-Axis Rotation): $ \omega = \frac{d\theta}{dt} $ (ความเร็วเชิงมุม) $ \alpha = \frac{d\omega}{dt} $ (ความเร่งเชิงมุม) $ v = r\omega $ (ความเร็วสัมผัส) $ a_t = r\alpha, a_n = r\omega^2 $ (ความเร่งสัมผัสและแนวฉาก) การเคลื่อนที่ระนาบทั่วไป (General Plane Motion): ความเร็วสัมพัทธ์: $ \vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A} $ ความเร่งสัมพัทธ์: $ \vec{a}_B = \vec{a}_A + \vec{\alpha} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A} $ จลนพลศาสตร์ของวัตถุแข็งเกร็ง (Kinetics of a Rigid Body) สมการการเคลื่อนที่ (Plane Motion): $ \sum F_x = m(\bar{a}_x) $ $ \sum F_y = m(\bar{a}_y) $ $ \sum M_G = \bar{I}\alpha $ (โมเมนต์รอบจุดศูนย์กลางมวล G) $ \sum M_P = \bar{I}\alpha + m\bar{a}_d $ (โมเมนต์รอบจุด P ใดๆ) โมเมนต์ความเฉื่อยของมวล: $ I = \int r^2 dm $ ทฤษฎีแกนขนานสำหรับมวล: $ I = \bar{I} + md^2 $ งานและพลังงาน: พลังงานจลน์: $ T = \frac{1}{2}m\bar{v}^2 + \frac{1}{2}\bar{I}\omega^2 $ หลักการงาน-พลังงาน: $ T_1 + U_{1-2} = T_2 $ แรงดลและโมเมนตัม: โมเมนตัมเชิงเส้น: $ m(\vec{v}_G)_1 + \sum \int \vec{F} dt = m(\vec{v}_G)_2 $ โมเมนตัมเชิงมุม: $ (\vec{H}_G)_1 + \sum \int \vec{M}_G dt = (\vec{H}_G)_2 $ โดย $ H_G = \bar{I}\omega $