JEE Laws of Motion Cheatsheet
Cheatsheet Content
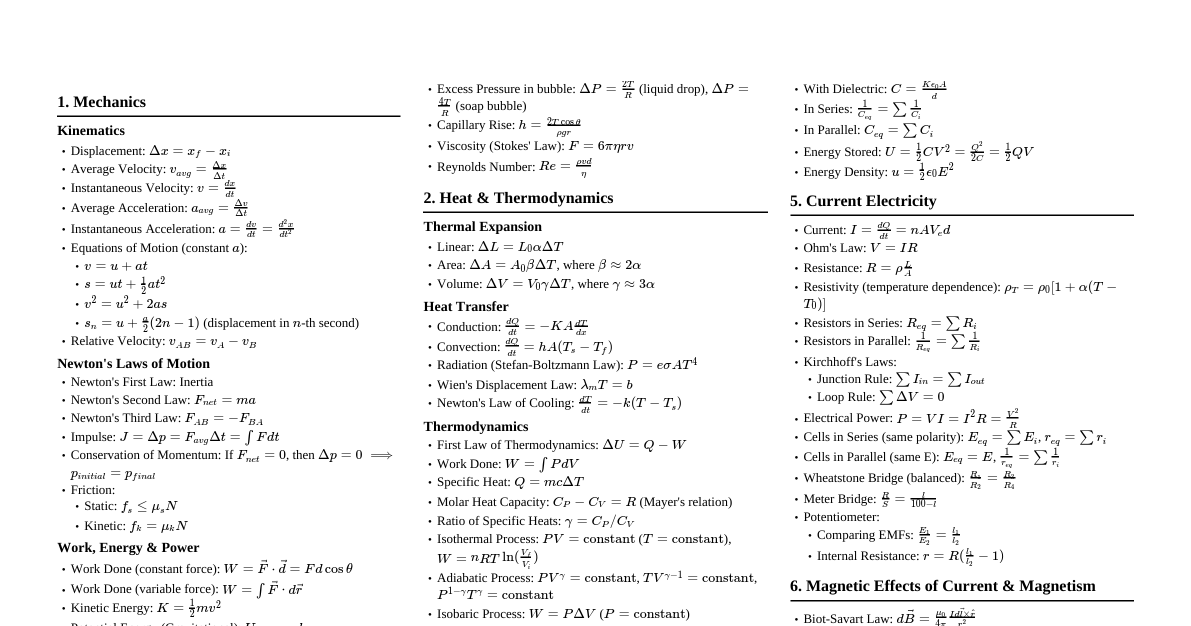
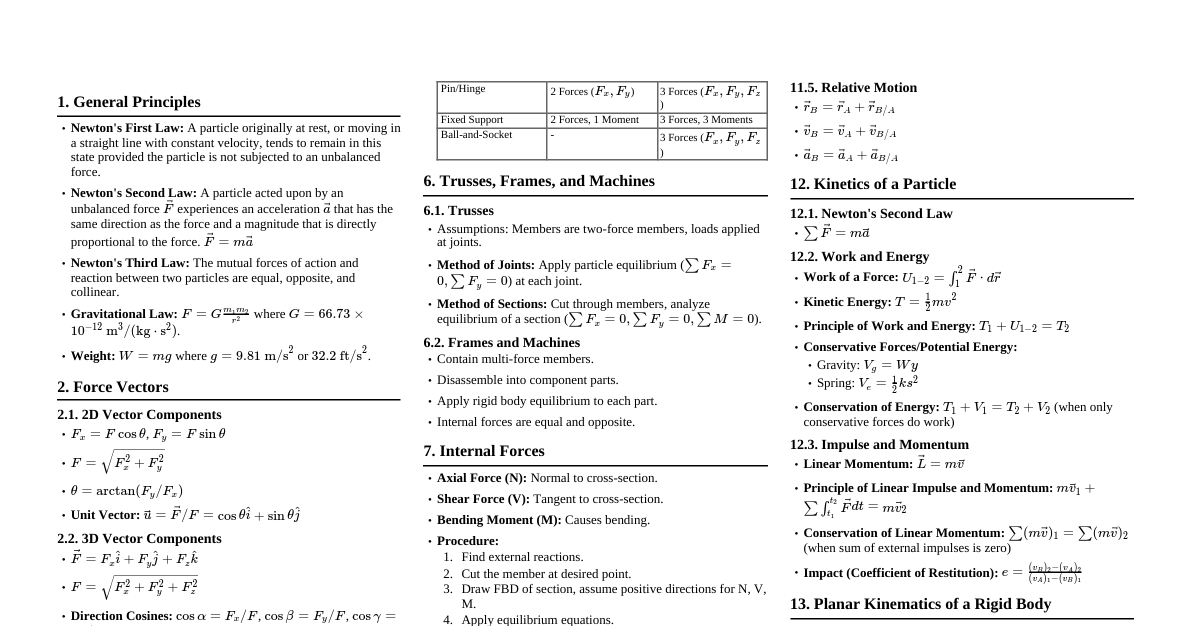
1. Newton's Laws of Motion First Law (Law of Inertia): An object at rest stays at rest and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. Second Law: The rate of change of momentum of a body is directly proportional to the applied force and takes place in the direction in which the force acts. $F = \frac{dp}{dt} = \frac{d(mv)}{dt}$ If mass $m$ is constant, $F = ma$ Units: Newton (N) or kg m/s$^2$ Third Law: To every action, there is always an equal and opposite reaction. Forces always occur in pairs. $F_{AB} = -F_{BA}$ Action-reaction pairs act on different bodies. 2. Momentum and Impulse Linear Momentum: $p = mv$ (vector quantity) Impulse (J): Change in momentum. $J = \Delta p = p_f - p_i = mv_f - mv_i$ Also, $J = \int F dt$. If $F$ is constant, $J = F \Delta t$ Units: N s or kg m/s Impulse-Momentum Theorem: The impulse applied to an object is equal to the change in its momentum. 3. Conservation of Linear Momentum If the net external force on a system is zero, the total linear momentum of the system remains constant. $\sum F_{ext} = 0 \implies \frac{dP_{sys}}{dt} = 0 \implies P_{sys} = \text{constant}$ For two bodies: $m_1 u_1 + m_2 u_2 = m_1 v_1 + m_2 v_2$ 4. Forces in Mechanics Weight (W): Force exerted by gravity. $W = mg$ (downwards) Normal Force (N): Perpendicular force exerted by a surface on an object in contact with it. Tension (T): Force transmitted through a rope, string, or cable. Acts along the length of the string, away from the object. Friction Force ($f$): Force opposing relative motion or tendency of motion between surfaces in contact. Static Friction ($f_s$): Acts when there is no relative motion. $f_s \le \mu_s N$ Kinetic Friction ($f_k$): Acts when there is relative motion. $f_k = \mu_k N$ Usually $\mu_s > \mu_k$. Spring Force ($F_s$): $F_s = -kx$ (Hooke's Law), where $k$ is spring constant, $x$ is displacement from equilibrium. 5. Free Body Diagrams (FBDs) Isolate the body. Draw all external forces acting on the body (weight, normal, tension, friction, applied, etc.). Do NOT include internal forces or action-reaction pairs acting on other bodies. Resolve forces into components along suitable axes (often parallel and perpendicular to motion). Apply Newton's Second Law ($\sum F = ma$) independently for each axis. 6. Apparent Weight In a Lift/Elevator: At rest or constant velocity ($a=0$): $N = mg$ Accelerating upwards ($a$): $N = m(g+a)$ (Apparent weight increases) Accelerating downwards ($a$): $N = m(g-a)$ (Apparent weight decreases) Free fall ($a=g$): $N = 0$ (Weightlessness) 7. Connected Bodies Blocks on a horizontal surface (pulled by force F): Common acceleration, $a = \frac{F}{m_1+m_2}$ Contact force between $m_1$ and $m_2$: $F_{12} = m_1 a$ (if $F$ acts on $m_2$) or $F_{21} = m_2 a$ (if $F$ acts on $m_1$) Atwood Machine: Two masses $m_1, m_2$ connected by a string over a pulley. ($m_1 > m_2$) Acceleration: $a = \frac{(m_1-m_2)g}{m_1+m_2}$ Tension: $T = \frac{2m_1m_2g}{m_1+m_2}$ Block on incline connected to hanging mass: Acceleration depends on $m_1, m_2, \theta$ and friction. FBDs for each mass, apply $\sum F = ma$. 8. Equilibrium of a Particle A particle is in equilibrium if the net force acting on it is zero. $\sum F = 0$ This implies: $\sum F_x = 0$, $\sum F_y = 0$ (and $\sum F_z = 0$) Particle is either at rest or moving with constant velocity. Lami's Theorem: For three concurrent and coplanar forces $F_1, F_2, F_3$ in equilibrium: $\frac{F_1}{\sin \alpha} = \frac{F_2}{\sin \beta} = \frac{F_3}{\sin \gamma}$ Where $\alpha, \beta, \gamma$ are angles opposite to $F_1, F_2, F_3$ respectively. 9. Frames of Reference Inertial Frame: A frame of reference where Newton's laws hold true. Either at rest or moving with constant velocity. Non-Inertial Frame: An accelerating frame of reference. Newton's laws do not directly apply. Pseudo/Fictitious Forces: Introduced in non-inertial frames to apply Newton's second law. Magnitude: $F_{pseudo} = ma_{frame}$ Direction: Opposite to the acceleration of the non-inertial frame. Example: Centrifugal force in rotating frames. 10. Circular Motion Dynamics Centripetal Force ($F_c$): The net force causing an object to move in a circular path. Always directed towards the center of the circle. $F_c = \frac{mv^2}{r} = m \omega^2 r$ This is NOT a new type of force; it is provided by existing forces (tension, friction, gravity, normal, etc.). Banking of Roads: Optimal speed (no friction): $v = \sqrt{rg \tan \theta}$ Max safe speed (with friction): $\tan \theta = \frac{v^2}{rg}$ is modified by friction coefficient. Conical Pendulum: Tension $T$, angle $\theta$ with vertical, length $L$. Horizontal component of tension provides centripetal force. Vertical component of tension balances weight. Vertical Circle Motion: Speed varies. Minimum speed at top ($v_{top} = \sqrt{rg}$) to complete the circle. Tension/Normal force varies. $N_{bottom} = \frac{mv^2}{r} + mg$, $N_{top} = \frac{mv^2}{r} - mg$.