Halliday
Cheatsheet Content
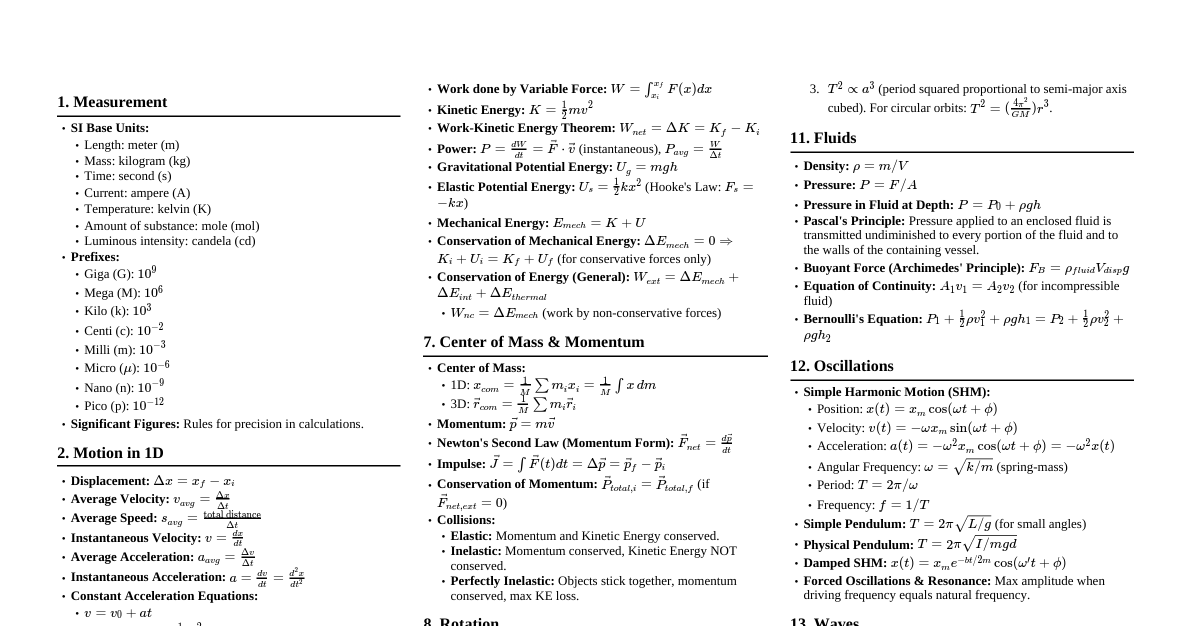
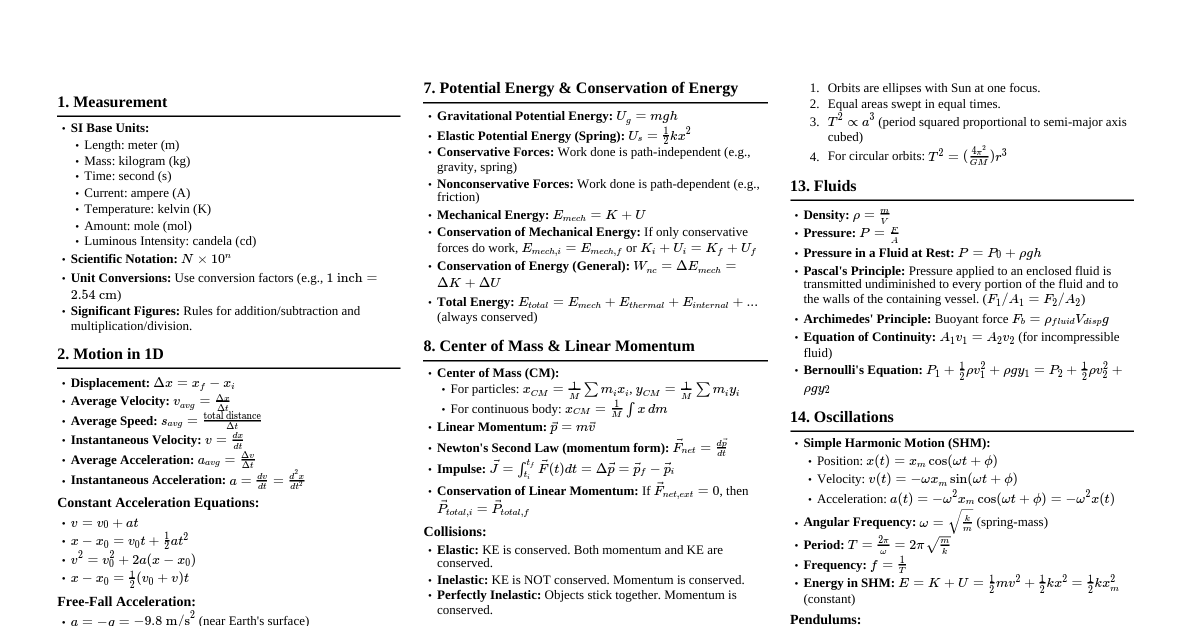
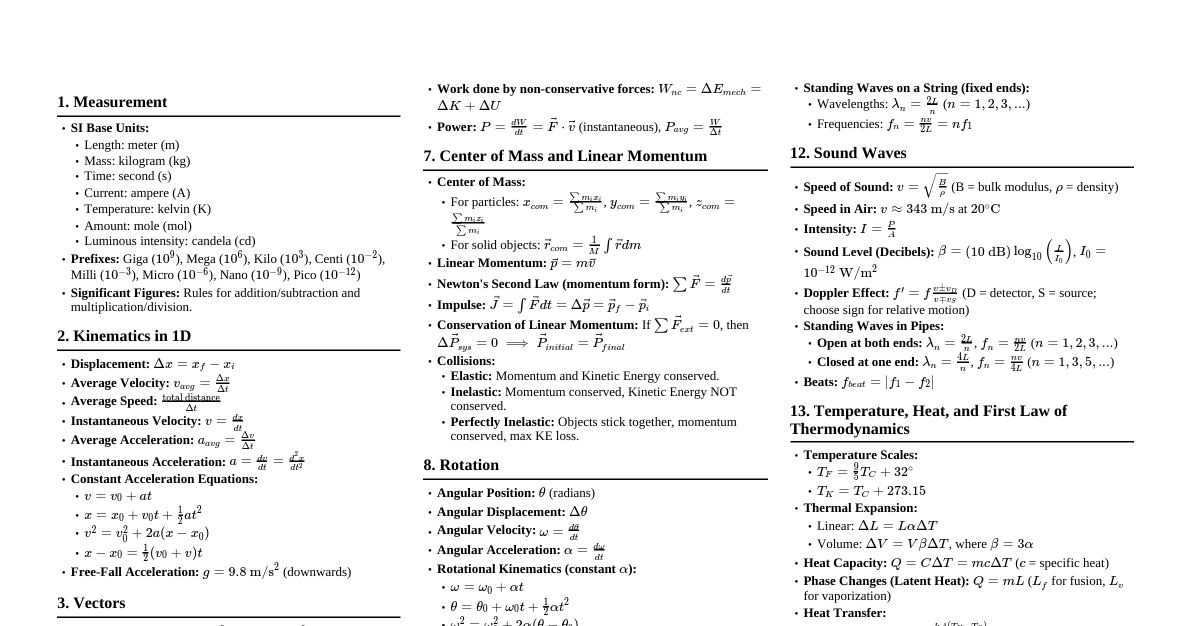
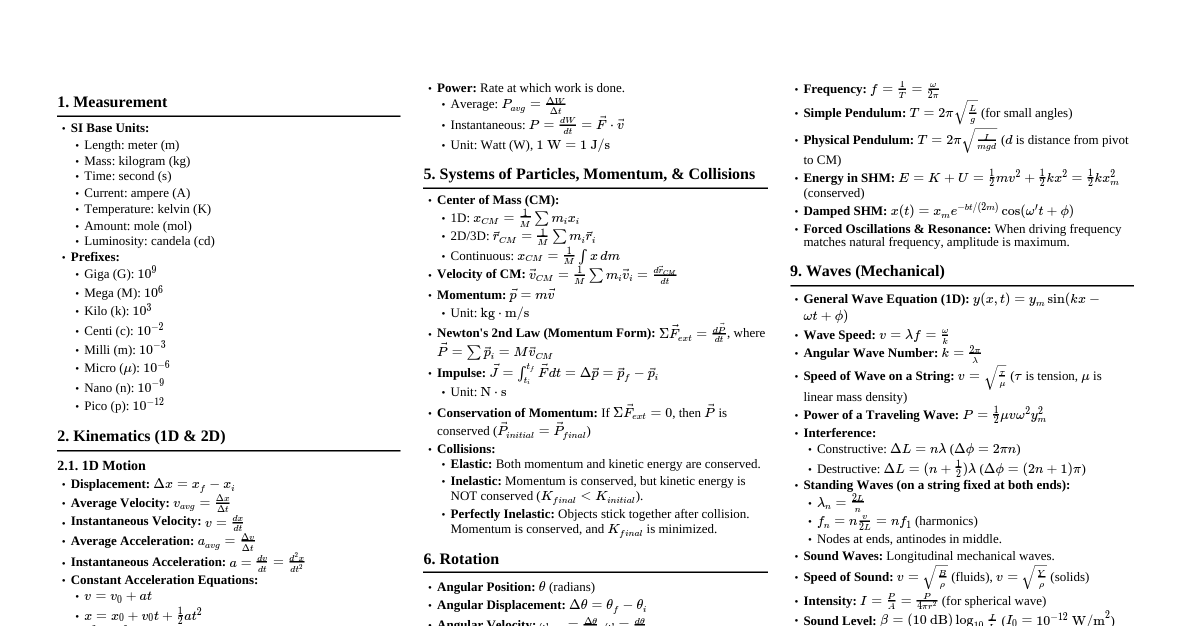
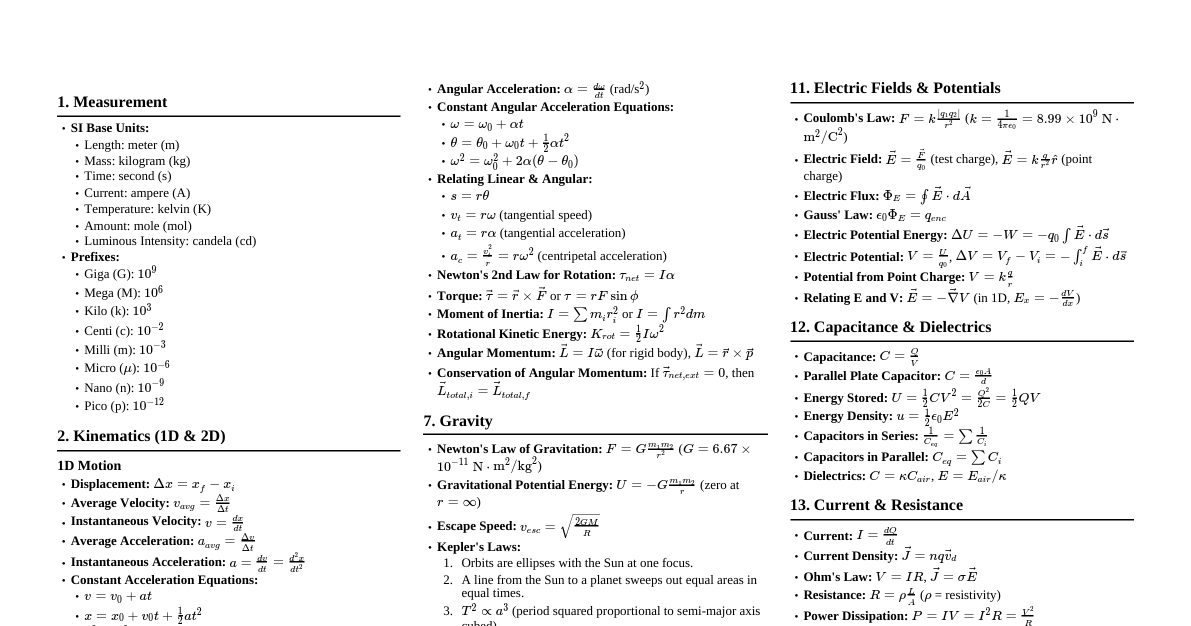
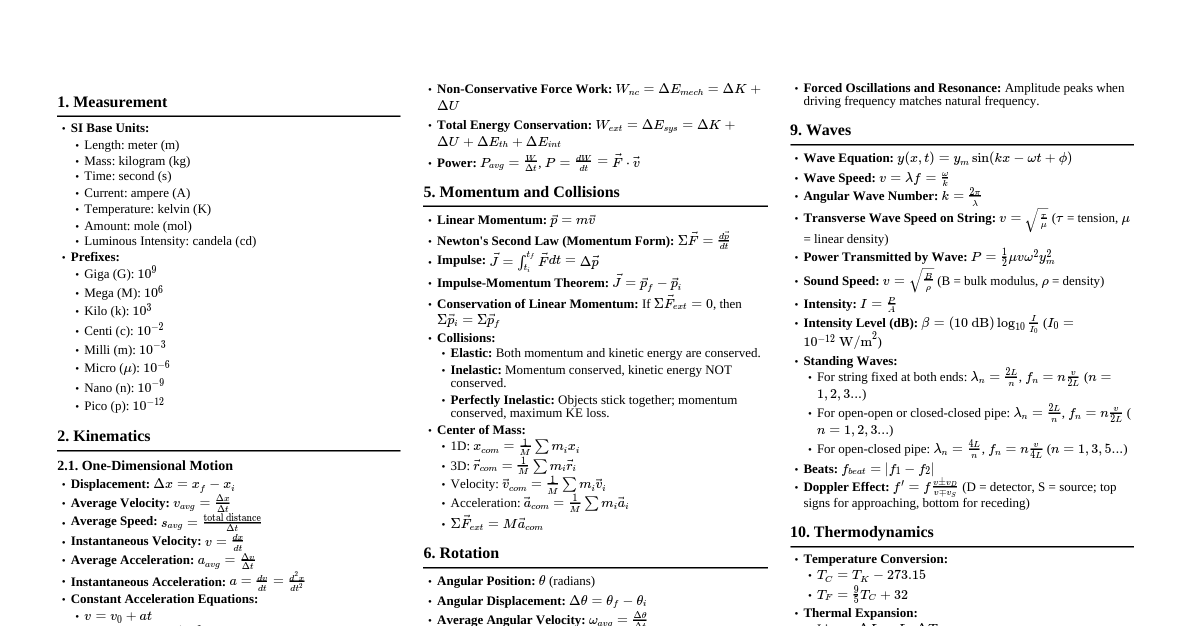
1. Measurement SI Base Units: Length: meter (m) Mass: kilogram (kg) Time: second (s) Current: ampere (A) Temperature: kelvin (K) Amount: mole (mol) Luminous Intensity: candela (cd) Scientific Notation: $N \times 10^n$, where $1 \le N Significant Figures: Non-zero digits are significant. Zeros between non-zero digits are significant. Leading zeros are not significant. Trailing zeros are significant if there's a decimal point. Unit Conversion: Multiply by ratios equal to 1 (e.g., $\frac{1 \text{ m}}{100 \text{ cm}}$) 2. Motion in 1D Displacement: $\Delta x = x_f - x_i$ (vector) Average Velocity: $v_{avg} = \frac{\Delta x}{\Delta t}$ Instantaneous Velocity: $v = \frac{dx}{dt}$ Average Acceleration: $a_{avg} = \frac{\Delta v}{\Delta t}$ Instantaneous Acceleration: $a = \frac{dv}{dt} = \frac{d^2x}{dt^2}$ Constant Acceleration Equations: $v = v_0 + at$ $x - x_0 = v_0 t + \frac{1}{2}at^2$ $v^2 = v_0^2 + 2a(x - x_0)$ $x - x_0 = \frac{1}{2}(v_0 + v)t$ Free-Fall Acceleration: $g = 9.8 \text{ m/s}^2$ (downwards, so $a = -g$) 3. Vectors Components: $A_x = A \cos \theta$, $A_y = A \sin \theta$ Magnitude: $A = \sqrt{A_x^2 + A_y^2}$ Direction: $\theta = \arctan\left(\frac{A_y}{A_x}\right)$ (watch quadrants) Unit Vectors: $\hat{i}, \hat{j}, \hat{k}$ for $x, y, z$ axes. $\vec{A} = A_x \hat{i} + A_y \hat{j} + A_z \hat{k}$ Vector Addition: $\vec{C} = \vec{A} + \vec{B} \implies C_x = A_x + B_x$, $C_y = A_y + B_y$ Scalar (Dot) Product: $\vec{A} \cdot \vec{B} = AB \cos \phi = A_x B_x + A_y B_y + A_z B_z$ Vector (Cross) Product: $\vec{A} \times \vec{B} = (A_y B_z - A_z B_y)\hat{i} + (A_z B_x - A_x B_z)\hat{j} + (A_x B_y - A_y B_x)\hat{k}$ Magnitude: $|\vec{A} \times \vec{B}| = AB \sin \phi$ Direction: Right-hand rule 4. Motion in 2D & 3D Position Vector: $\vec{r} = x\hat{i} + y\hat{j} + z\hat{k}$ Velocity Vector: $\vec{v} = \frac{d\vec{r}}{dt} = v_x\hat{i} + v_y\hat{j} + v_z\hat{k}$ Acceleration Vector: $\vec{a} = \frac{d\vec{v}}{dt} = a_x\hat{i} + a_y\hat{j} + a_z\hat{k}$ Projectile Motion (Constant $a_y = -g$, $a_x = 0$): $x - x_0 = (v_0 \cos \theta_0)t$ $y - y_0 = (v_0 \sin \theta_0)t - \frac{1}{2}gt^2$ $v_y = v_0 \sin \theta_0 - gt$ $v_y^2 = (v_0 \sin \theta_0)^2 - 2g(y - y_0)$ Range $R = \frac{v_0^2}{g} \sin(2\theta_0)$ (for $y_0=0, y=0$) Uniform Circular Motion: Speed: $v = \frac{2\pi r}{T}$ Centripetal Acceleration: $a_c = \frac{v^2}{r}$ (directed towards center) 5. Force & Motion (Newton's Laws) Newton's 1st Law: An object at rest stays at rest, and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. Newton's 2nd Law: $\vec{F}_{net} = m\vec{a}$ Newton's 3rd Law: If object A exerts a force on object B, then object B exerts a force of equal magnitude and opposite direction on object A. ($\vec{F}_{AB} = -\vec{F}_{BA}$) Types of Forces: Weight: $F_g = mg$ (downwards) Normal Force: $F_N$ (perpendicular to surface) Tension: $T$ (along a string/rope) Friction: $f_s \le \mu_s F_N$ (static), $f_k = \mu_k F_N$ (kinetic) Drag Force: $D = \frac{1}{2} C \rho A v^2$ or $D = bv$ (for low speeds) Free-Body Diagrams: Essential for solving problems. 6. Kinetic Energy & Work Kinetic Energy (KE): $K = \frac{1}{2}mv^2$ Work Done by Constant Force: $W = \vec{F} \cdot \vec{d} = Fd \cos \phi$ Work Done by Variable Force: $W = \int_{x_i}^{x_f} F(x) dx$ Work-Kinetic Energy Theorem: $W_{net} = \Delta K = K_f - K_i$ Power: $P = \frac{dW}{dt}$ (average: $P_{avg} = \frac{\Delta W}{\Delta t}$); $P = \vec{F} \cdot \vec{v}$ 7. Potential Energy & Conservation of Energy Gravitational Potential Energy: $U_g = mgh$ Elastic Potential Energy (Spring): $U_s = \frac{1}{2}kx^2$ Conservative Forces: Work done is path-independent (e.g., gravity, spring). $W_c = -\Delta U$. Non-Conservative Forces: Work done is path-dependent (e.g., friction, drag). Mechanical Energy: $E_{mec} = K + U$ Conservation of Mechanical Energy: If only conservative forces do work, $\Delta E_{mec} = 0 \implies K_i + U_i = K_f + U_f$ Conservation of Energy (General): $W_{nc} = \Delta E_{mec} = \Delta K + \Delta U$. If $W_{nc}=0$, then $E_{mec}$ is conserved. Also: $E_{sys} = E_{mec} + E_{int} + E_{therm} + \dots$ $\Delta E_{sys} = 0$ (for isolated system) Force from Potential Energy: $F_x = -\frac{dU}{dx}$ 8. Center of Mass & Linear Momentum Center of Mass (CM): Particles: $x_{CM} = \frac{1}{M} \sum m_i x_i$, $y_{CM} = \frac{1}{M} \sum m_i y_i$ Continuous: $x_{CM} = \frac{1}{M} \int x \ dm$, $y_{CM} = \frac{1}{M} \int y \ dm$ Linear Momentum: $\vec{p} = m\vec{v}$ Newton's 2nd Law (Momentum Form): $\vec{F}_{net} = \frac{d\vec{p}}{dt}$ Impulse: $\vec{J} = \int \vec{F} dt = \Delta \vec{p} = \vec{p}_f - \vec{p}_i$ Conservation of Linear Momentum: If $\vec{F}_{net,ext} = 0$, then $\vec{P}_{total} = \text{constant}$. $\sum \vec{p}_{i,initial} = \sum \vec{p}_{i,final}$ Collisions: Elastic: KE and momentum conserved. Inelastic: Momentum conserved, KE not conserved. Perfectly Inelastic: Objects stick together, momentum conserved, max KE lost. 9. Rotation Angular Position: $\theta$ (radians) Angular Displacement: $\Delta \theta = \theta_f - \theta_i$ Average Angular Velocity: $\omega_{avg} = \frac{\Delta \theta}{\Delta t}$ Instantaneous Angular Velocity: $\omega = \frac{d\theta}{dt}$ Average Angular Acceleration: $\alpha_{avg} = \frac{\Delta \omega}{\Delta t}$ Instantaneous Angular Acceleration: $\alpha = \frac{d\omega}{dt}$ Constant Angular Acceleration Equations: (analogous to 1D linear motion) $\omega = \omega_0 + \alpha t$ $\theta - \theta_0 = \omega_0 t + \frac{1}{2}\alpha t^2$ $\omega^2 = \omega_0^2 + 2\alpha(\theta - \theta_0)$ Relating Linear and Angular Variables (for a point on a rotating body): $s = r\theta$ $v_t = r\omega$ (tangential speed) $a_t = r\alpha$ (tangential acceleration) $a_c = \frac{v_t^2}{r} = r\omega^2$ (centripetal acceleration) Rotational Kinetic Energy: $K_{rot} = \frac{1}{2}I\omega^2$ Moment of Inertia: $I = \sum m_i r_i^2$ (discrete); $I = \int r^2 dm$ (continuous) Parallel-Axis Theorem: $I = I_{CM} + Md^2$ Torque: $\vec{\tau} = \vec{r} \times \vec{F}$; $|\tau| = rF \sin \phi$ Newton's 2nd Law for Rotation: $\vec{\tau}_{net} = I\vec{\alpha}$ Work in Rotation: $W = \int_{\theta_i}^{\theta_f} \tau d\theta$ Power in Rotation: $P = \tau \omega$ 10. Rolling, Torque & Angular Momentum Rolling without Slipping: $v_{CM} = R\omega$, $a_{CM} = R\alpha$ Total Kinetic Energy (Rolling): $K = K_{CM} + K_{rot} = \frac{1}{2}Mv_{CM}^2 + \frac{1}{2}I_{CM}\omega^2$ Angular Momentum: Particle: $\vec{l} = \vec{r} \times \vec{p} = m(\vec{r} \times \vec{v})$ Rigid Body: $\vec{L} = I\vec{\omega}$ Newton's 2nd Law (Angular Form): $\vec{\tau}_{net} = \frac{d\vec{L}}{dt}$ Conservation of Angular Momentum: If $\vec{\tau}_{net,ext} = 0$, then $\vec{L}_{total} = \text{constant}$. $I_i \omega_i = I_f \omega_f$ 11. Equilibrium & Elasticity Conditions for Equilibrium: Translational Equilibrium: $\sum \vec{F}_{ext} = 0$ Rotational Equilibrium: $\sum \vec{\tau}_{ext} = 0$ (choose any pivot) Stress: $\sigma = \frac{F}{A}$ (Force per unit area) Strain: $\epsilon = \frac{\Delta L}{L_0}$ (Fractional change in length) Elastic Moduli: Stress = Modulus $\times$ Strain Young's Modulus (tension/compression): $E = \frac{\text{Tensile Stress}}{\text{Tensile Strain}}$ Shear Modulus (shear): $G = \frac{\text{Shear Stress}}{\text{Shear Strain}}$ Bulk Modulus (volume change): $B = -\frac{\Delta p}{\Delta V / V}$ 12. Gravitation Newton's Law of Gravitation: $F = G \frac{m_1 m_2}{r^2}$ ($G = 6.67 \times 10^{-11} \text{ N}\cdot\text{m}^2/\text{kg}^2$) Gravitational Acceleration: $g = G \frac{M}{r^2}$ (at surface of mass M) Gravitational Potential Energy: $U = -G \frac{m_1 m_2}{r}$ (zero at $r=\infty$) Escape Speed: $v_{esc} = \sqrt{\frac{2GM}{R}}$ Kepler's Laws: 1st: Orbits are ellipses with the Sun at one focus. 2nd: A line joining a planet and the Sun sweeps out equal areas in equal times. 3rd: $T^2 \propto a^3$ (period squared is proportional to semi-major axis cubed). For circular orbit: $T^2 = \left(\frac{4\pi^2}{GM}\right) r^3$. 13. Fluids Density: $\rho = \frac{m}{V}$ Pressure: $p = \frac{F}{A}$ Pressure in Fluid at Rest: $p = p_0 + \rho g h$ Pascal's Principle: A change in pressure applied to an enclosed fluid is transmitted undiminished to every portion of the fluid and to the walls of the containing vessel. ($\frac{F_1}{A_1} = \frac{F_2}{A_2}$) Archimedes' Principle: Buoyant force $F_b = \rho_{fluid} V_{disp} g$ Equation of Continuity: $A_1 v_1 = A_2 v_2$ (for incompressible fluid) Bernoulli's Equation: $p_1 + \frac{1}{2}\rho v_1^2 + \rho g y_1 = p_2 + \frac{1}{2}\rho v_2^2 + \rho g y_2$ 14. Oscillations Simple Harmonic Motion (SHM): Position: $x(t) = x_m \cos(\omega t + \phi)$ Velocity: $v(t) = -\omega x_m \sin(\omega t + \phi)$ Acceleration: $a(t) = -\omega^2 x_m \cos(\omega t + \phi) = -\omega^2 x(t)$ Angular Frequency: $\omega = \sqrt{\frac{k}{m}}$ (spring-mass system) Period: $T = \frac{2\pi}{\omega} = 2\pi \sqrt{\frac{m}{k}}$ Frequency: $f = \frac{1}{T}$ Total Mechanical Energy: $E = \frac{1}{2}kx_m^2 = \frac{1}{2}mv^2 + \frac{1}{2}kx^2$ Pendulums: Simple Pendulum: $T = 2\pi \sqrt{\frac{L}{g}}$ (for small angles) Physical Pendulum: $T = 2\pi \sqrt{\frac{I}{mgd}}$ ($d$ is distance from pivot to CM) Torsion Pendulum: $T = 2\pi \sqrt{\frac{I}{\kappa}}$ ($\kappa$ is torsion constant) Damped SHM: $x(t) = x_m e^{-bt/2m} \cos(\omega' t + \phi)$ Forced Oscillations & Resonance: When driving frequency equals natural frequency, amplitude is maximized. 15. Waves Wave Speed: $v = \lambda f$ Transverse Wave on String: $v = \sqrt{\frac{\tau}{\mu}}$ ($\tau$ tension, $\mu$ linear density) Wave Equation: $\frac{\partial^2 y}{\partial x^2} = \frac{1}{v^2} \frac{\partial^2 y}{\partial t^2}$ General Wave Function: $y(x,t) = y_m \sin(kx \pm \omega t + \phi)$ Wave Number: $k = \frac{2\pi}{\lambda}$ Angular Frequency: $\omega = 2\pi f$ $v = \frac{\omega}{k}$ Power Transmitted by Wave: $P = \frac{1}{2}\mu v \omega^2 y_m^2$ Intensity: $I = \frac{P}{A}$ Interference: Superposition of waves. Constructive: Path difference $= n\lambda$ Destructive: Path difference $= (n + \frac{1}{2})\lambda$ Standing Waves: Conditions for resonance. String fixed at both ends: $\lambda_n = \frac{2L}{n}$, $f_n = \frac{nv}{2L}$ ($n=1,2,3,\dots$) 16. Sound Waves Speed of Sound: Fluids: $v = \sqrt{\frac{B}{\rho}}$ ($B$ bulk modulus) Solids (rod): $v = \sqrt{\frac{E}{\rho}}$ ($E$ Young's modulus) Ideal Gas: $v = \sqrt{\frac{\gamma RT}{M}}$ ($\gamma$ adiabatic index, $M$ molar mass) Approx. in air at $20^\circ C$: $343 \text{ m/s}$ Intensity: $I = \frac{P}{A}$ Sound Level (decibels): $\beta = (10 \text{ dB}) \log_{10}\left(\frac{I}{I_0}\right)$ ($I_0 = 10^{-12} \text{ W/m}^2$) Standing Waves in Pipes: Open at both ends: $\lambda_n = \frac{2L}{n}$, $f_n = \frac{nv}{2L}$ ($n=1,2,3,\dots$) Open at one end, closed at other: $\lambda_n = \frac{4L}{n}$, $f_n = \frac{nv}{4L}$ ($n=1,3,5,\dots$) Beats: $f_{beat} = |f_1 - f_2|$ Doppler Effect: $f' = f \frac{v \pm v_D}{v \mp v_S}$ (Numerator: + for detector moving towards, - for away. Denominator: - for source moving towards, + for away.) 17. Temperature, Heat & 1st Law of Thermodynamics Temperature Scales: $T_F = \frac{9}{5}T_C + 32^\circ$ $T_K = T_C + 273.15$ Thermal Expansion: Length: $\Delta L = L \alpha \Delta T$ Area: $\Delta A = A (2\alpha) \Delta T$ Volume: $\Delta V = V \beta \Delta T$ ($\beta = 3\alpha$) Heat Capacity: $Q = C \Delta T$ Specific Heat: $Q = cm \Delta T$ Latent Heat (Phase Change): $Q = L m$ ($L_f$ for fusion, $L_v$ for vaporization) First Law of Thermodynamics: $\Delta E_{int} = Q - W$ $Q$: heat added to system (+) / removed (-) $W$: work done BY system (+) / ON system (-) Work done by gas (quasi-static): $W = \int p dV$ Heat Transfer Mechanisms: Conduction: $P_{cond} = kA \frac{\Delta T}{L}$ Convection: Mass movement of fluid Radiation: $P_{rad} = \sigma \epsilon A T^4$ (Stefan-Boltzmann Law) 18. Kinetic Theory of Gases Ideal Gas Law: $pV = nRT = NkT$ $R = 8.31 \text{ J/(mol}\cdot\text{K)}$ (gas constant) $k = 1.38 \times 10^{-23} \text{ J/K}$ (Boltzmann constant) $N_A = 6.02 \times 10^{23} \text{ mol}^{-1}$ (Avogadro's number) $n = N/N_A$ Pressure & Molecular Speed: $p = \frac{nM\overline{v^2}}{3V}$ RMS Speed: $v_{rms} = \sqrt{\frac{3RT}{M}} = \sqrt{\frac{3kT}{m}}$ Average Translational KE: $K_{avg} = \frac{3}{2}kT$ Internal Energy of Ideal Gas: $E_{int} = n C_V T$ Monatomic: $C_V = \frac{3}{2}R$, $C_p = \frac{5}{2}R$ Diatomic: $C_V = \frac{5}{2}R$, $C_p = \frac{7}{2}R$ $C_p - C_V = R$ Adiabatic Process: $pV^\gamma = \text{constant}$, $T V^{\gamma-1} = \text{constant}$ ($\gamma = C_p/C_V$) 19. Entropy & 2nd Law of Thermodynamics 2nd Law of Thermodynamics: Heat flows spontaneously from hotter to colder bodies. It is impossible to build a perfect heat engine. The entropy of an isolated system never decreases. Entropy Change (reversible): $\Delta S = \int \frac{dQ}{T}$ Entropy Change (isothermal): $\Delta S = \frac{Q}{T}$ Engine Efficiency: $\epsilon = \frac{|W|}{|Q_H|} = 1 - \frac{|Q_L|}{|Q_H|}$ Carnot Engine Efficiency (ideal): $\epsilon_C = 1 - \frac{T_L}{T_H}$ Coefficient of Performance (COP): Refrigerator: $K = \frac{|Q_L|}{|W|}$ Heat Pump: $K = \frac{|Q_H|}{|W|}$ Carnot COP: Refrigerator: $K_C = \frac{T_L}{T_H - T_L}$ Heat Pump: $K_C = \frac{T_H}{T_H - T_L}$ Entropy Change for Irreversible Process: $\Delta S > 0$ for isolated system.